水下机器人水密舱漏水检测系统及方法与流程
本发明属于水下机器人,尤其涉及一种水下机器人水密舱漏水检测系统及方法。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。由于水下机器人运行的环境复杂,其舱体的可靠密封是其正常工作及安全的前提,因此,漏水检测装置是水下机器人安全保障的重要部分。
2、目前的水下机器人水密舱的漏水检测装置结构复杂,检测过程繁琐,且不能保证漏水检测的准确性。
技术实现思路
1、针对相关技术中存在的不足之处,本发明的目的在于提供一种水下机器人水密舱漏水检测系统及方法,以解决现有的水下机器人水密舱的漏水检测结果不准确的问题。
2、为实现上述目的,本发明提供如下技术方案:
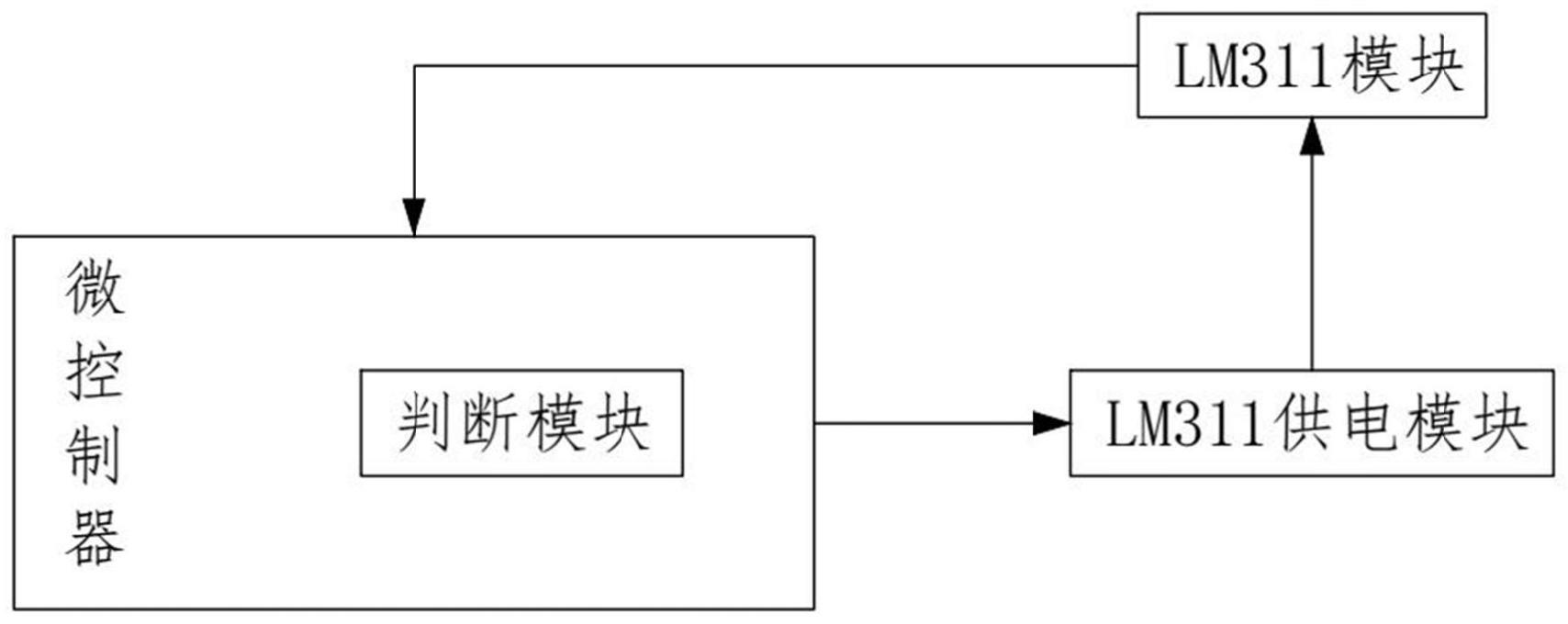
3、一种水下机器人水密舱漏水检测系统,包括:
4、lm311模块,lm311模块设有接线端子p10,接线端子p10连接水密舱端盖,接线端子p10在水密舱漏水接触水时为短接状态,在水密舱不漏水未接触水时为断开状态,lm311模块根据接线端子p10的状态输出电平信号;
5、微控制器,微控制器与lm311模块电连接以接收电平信号,微控制器包括判断模块,判断模块用以根据电平信号判断是否漏水;
6、lm311供电模块,lm311供电模块与lm311模块通过引线water_power连接,lm311供电模块与微控制器电连接,以使微控制器控制lm311供电模块为lm311模块提供工作电压。
7、在其中一些实施例中,lm311模块还包括电阻r26、电阻r27、电阻r29、滑动变阻器r30、输出引线in1、输出引线in2和比较器u13;
8、电阻r26的第一端和滑动变阻器r30的第一端与引线water_power的第二端连接;
9、电阻r26的第二端与电阻r27的第一端和输出引线in1的第一端连接;
10、滑动变阻器r30的第二端与电阻r29的第一端和输出引线in2的第一端连接;
11、电阻r27的第二端和电阻r29的第二端接地;
12、接线端子p10的引脚1与输出引线in2的第二端连接,接线端子p10的引脚2接地,接线端子p10通过导线连接水密舱端盖;
13、比较器u13的同相输入端与输出引线in1的第二端连接以使工作电压通过输出引线in1输入比较器u13,比较器u13的反相输入端与输出引线in2的第二端连接以使接线端子p10处的电压通过输出引线in2输入比较器u13,比较器u13的out引脚为输出引脚以输出电平信号。
14、在其中一些实施例中,微控制器具有pa0引脚、pa1引脚、pb11引脚、pe15引脚和nrst引脚;pa0引脚、pa1引脚和nrst引脚用以连接接线端子输出打印信息;pb11引脚与out引脚连接以使微控制器接收电平信号;pe15引脚用以连接lm311供电模块。
15、在其中一些实施例中,水下机器人水密舱漏水检测系统还包括接线端子p12,接线端子p12的引脚1与pa1引脚连接,接线端子p12的引脚2与pa0引脚连接,接线端子p12的引脚3接地,接线端子p12的引脚4与nrst引脚连接,接线端子p12用以输出打印信息。
16、在其中一些实施例中,lm311供电模块包括mos管u14,mos管u14的第一输入端与pe15引脚连接,mos管u14的第二输入端接电源,mos管u14的输出端与引线water_power的第一端连接。
17、一种水下机器人水密舱漏水检测方法,采用上述的水下机器人水密舱漏水检测系统,所述方法包括:
18、s1、调整滑动变阻器r30至设定阻值;
19、s2、微控制器控制lm311供电模块为lm311模块提供工作电压,lm311模块开始工作,输出引线in1处的电压为所述工作电压的一半,输出引线in2处的电压为所述工作电压的三分之二;
20、s3、接线端子p10检测水密舱的漏水状态,比较器u13比较输出引线in1和输出引线in2的电压,接线端子p10在水密舱不漏水未接触水时为断开状态,输出引线in1处的电压小于输出引线in2处的电压,比较器u13的out引脚输出低电平信号,接线端子p10在水密舱漏水接触水时为短接状态,输出引线in2处的电压为零,输出引线in1处的电压大于输出引线in2处的电压,比较器u13的out引脚输出高电平信号;
21、s4、微控制器接收out引脚输出的电平信号,接收到低电平信号时判断模块判断水密舱未漏水,接收到高电平信号时判断模块判断水密舱漏水。
22、在其中一些实施例中,步骤s2中,微控制器控制lm311供电模块为lm311模块提供工作电压具体为,微控制器的pe15引脚输出高电平信号至mos管u14的第一输入端,mos管u14由截止状态切换至导通状态,工作电压由mos管u14的第二输入端进入并经mos管u14的输出端和引线water_power传递至lm311模块。
23、在其中一些实施例中,水下机器人水密舱漏水检测方法还包括s5:微控制器判断水密舱漏水时控制接线端子p12输出设备漏水的打印信息。
24、在其中一些实施例中,步骤s2中,通过微控制器根据水下机器人下水工作时间预设pe15引脚输出高电平信号的时间。
25、与现有技术相比,本发明的有益效果是:
26、1、本发明提供的水下机器人水密舱漏水检测系统包括lm311模块、微控制器和lm311供电模块,结构简单体积小,便于移动,设计原理可靠且检测结果的准确性高,在水密舱漏水时可以及时发现以避免造成重大损失,具有实际应用价值。
27、2、本发明提供的水下机器人水密舱漏水检测方法是基于lm311的检测方法,由比较器u13比较输出引线in1处和输出引线in2处的电压大小,并由out引脚输出电平信号,最后微控制器根据所输出的电平信号判断水密舱是否漏水,漏水检测方法的判断依据合理,智能便捷,检测到水密舱漏水时接线端子p12输出设备漏水的打印信息,使检测结果更直观。
技术特征:
1.一种水下机器人水密舱漏水检测系统,其特征在于,包括:
2.根据权利要求1所述的水下机器人水密舱漏水检测系统,其特征在于,所述lm311模块还包括电阻r26、电阻r27、电阻r29、滑动变阻器r30、输出引线in1、输出引线in2和比较器u13;
3.根据权利要求2所述的水下机器人水密舱漏水检测系统,其特征在于,所述微控制器具有pa0引脚、pa1引脚、pb11引脚、pe15引脚和nrst引脚;所述pa0引脚、pa1引脚和nrst引脚用以连接接线端子输出打印信息;所述pb11引脚与所述out引脚连接以使所述微控制器接收所述电平信号;所述pe15引脚用以连接所述lm311供电模块。
4.根据权利要求3所述的水下机器人水密舱漏水检测系统,其特征在于,还包括接线端子p12,所述接线端子p12的引脚1与pa1引脚连接,所述接线端子p12的引脚2与pa0引脚连接,所述接线端子p12的引脚3接地,所述接线端子p12的引脚4与nrst引脚连接,所述接线端子p12用以输出打印信息。
5.根据权利要求4所述的水下机器人水密舱漏水检测系统,其特征在于,所述lm311供电模块包括mos管u14,mos管u14的第一输入端与所述pe15引脚连接,mos管u14的第二输入端接电源,mos管u14的输出端与引线water_power的第一端连接。
6.一种水下机器人水密舱漏水检测方法,其特征在于,采用权利要求5所述的水下机器人水密舱漏水检测系统,所述方法包括:
7.根据权利要求6所述的水下机器人水密舱漏水检测方法,其特征在于,步骤s2中,微控制器控制lm311供电模块为lm311模块提供工作电压具体为,微控制器的pe15引脚输出高电平信号至mos管u14的第一输入端,mos管u14由截止状态切换至导通状态,工作电压由mos管u14的第二输入端进入并经mos管u14的输出端和引线water_power传递至lm311模块。
8.根据权利要求6所述的水下机器人水密舱漏水检测方法,其特征在于,还包括s5:微控制器判断水密舱漏水时控制接线端子p12输出设备漏水的打印信息。
9.根据权利要求6所述的水下机器人水密舱漏水检测方法,其特征在于,步骤s2中,通过微控制器根据水下机器人下水工作时间预设pe15引脚输出高电平信号的时间。
技术总结
本发明公开了一种水下机器人水密舱漏水检测系统及方法,属于水下机器人技术领域。该方法包括:调整滑动变阻器R30至设定阻值;微控制器控制LM311供电模块为LM311模块提供工作电压;接线端子P10检测水密舱的漏水状态,比较器U13比较输出引线IN1和输出引线IN2的电压,水密舱未漏水时,比较器U13的OUT引脚输出低电平信号,水密舱漏水时,接线端子P10与水接触短接,比较器U13的OUT引脚输出高电平信号;微控制器接收OUT引脚输出的电平信号,接收到低电平信号时判断为未漏水,接收到高电平信号时判断为漏水。本发明提供的水下机器人水密舱漏水检测系统及方法可以合理判断水密舱的漏水状态,检测结果准确,安全可靠,具有实际应用价值。
技术研发人员:董彦凯,任翀,王田野,赵晓,刘娅娜,王粲,孙涛
受保护的技术使用者:青岛海洋科技中心
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!