风速变送器探杆角度调整方法及风速变送器与流程
本发明涉及一种风速变送器探杆角度调整方法及风速变送器,主要应用于暖通空调、能源管理系统、vav(变风量)及风扇控制、炉通风控制等领域。
背景技术:
1、现如今,风速、风量仪表更多的出现在工业生产、日常生活等领域,它与国民经济、工业生产、科学研究和环境保护息息相关。随着工业自动化的飞速发展,人们对风速、风量的测量要求也日益提高。重复性好、线性好、可靠性高、安装维护简单的风速变送器是未来的发展趋势。
2、目前市面上应用比较广泛的是热式风速变送器,其基本原理是将一根很细的金属丝放在流体中,通电流加热金属丝,使其温度高于流体的温度,当流体沿垂直方向流过金属丝时,将带走金属丝的一部分热量,使金属丝温度下降,根据强迫对流热交换理论,从而导出金属丝散失的热量q与流体的速度v之间的关系式。
3、热式风速变送器的测量准确性与稳定性取决于探头的正确安装与定位,只有当探头安装在层流的位置时,才能进行准确的测量,因此对探杆的安装深度和安装角度都有要求,理想的安装位置如下:探杆插入深度为管道直径的30%~50%;探头进风口与风向保持水平,最大偏移角度不大于5°。
4、目前市面上的绝大部分热式风速变送器,都需要安装人员不断调节探杆来满足此安装要求,使用较为不便。具体来说,大多数热式风速变送器的探杆杆身上都铭刻有标尺,安装人员通过测量管道直径来计算出探杆的插入深度,结合探杆标尺比较容易把握安装深度。而探头进风口与风向保持水平这一要求则较难实现,工厂每次进行风速标定时,变送器探头很难通过人工调整来保持相同的安装角度,这样容易给标定结果引入误差,造成变送器的一致性变差。相对应的,客户在安装过程中也需要不断的调整探头与风向的角度,甚至需要借用标准风量设备测量对比,来获得较好的测量结果,安装过程费时费力。
技术实现思路
1、本发明的目的是针对上述存在的问题,提供一种风速变送器探杆角度调整方法及风速变送器,以方便调整探杆与风向的角度。
2、为了达到上述目的,本发明通过以下技术方案来实现:
3、一种风速变送器探杆角度调整方法,包括:
4、s1、风速变送器探杆安装完成后,控制探杆绕其轴线旋转1周;
5、s2、旋转过程中,实时采集探杆在x、y、z轴的重力加速度值和角速度值,以及采集该重力加速度值和角速度值时的风速值,并进行滤波;
6、s3、每隔一定时间δt针对当前状态下所得到的、滤波后的x、y、z轴的重力加速度值和角速度值进行姿态求解,并将两种姿态进行互补融合,得到探杆的多个第一横滚角;
7、s4、记录最大风速值所对应x、y、z轴的重力加速度值和角速度值求解得到的横滚角,作为第二横滚角;
8、s5、控制探杆再次绕其轴线旋转,执行步骤s2、s3,得到至少一个第三横滚角,当第三横滚角与第二横滚角之差小于2倍toffset时,探杆停止旋转;
9、
10、式中,t0为探杆绕其轴线旋转1周的用时,δt为探杆旋转过程中,相邻两次姿态求解的间隔时间。
11、优选的,采用递推平均滤波法将连续取得的n个采样值看成一个队列,队列的长度固定为n,每次采集到的新数据放入队尾,并扔掉原来队首的数据,把队列中的n个数据进行算术平均运算,获得新的滤波结果,完成滤波。
12、优选的,
13、采用以下公式计算,得到所述第一横滚角和第三横滚角,
14、
15、式中,roll(n+1)为当前状态下的横滚角,rolln为前一状态下的横滚角,rollacc为通过三轴加速度计数据计算得到的当前状态下的横滚角,rollgyro为通过三轴陀螺仪数据计算得到的当前状态下的横滚角,k为系数,取值范围为0.5-0.8,n为自然数,即一系列状态0、1、2、3...,当n=0时,为初始静止状态。
16、优选的,
17、采用以下公式计算,得到初始静止状态下的横滚角roll0,
18、
19、式中,ay0为初始静止状态下三轴加速度计输出的y轴重力加速度,az0为初始静止状态下三轴加速度计输出的z轴重力加速度;
20、采用以下公式计算,得到通过三轴加速度计数据解算的当前状态下的横滚角rollacc,
21、
22、式中,ayacc为当前状态下三轴加速度计输出的y轴重力加速度,azacc为当前状态下三轴加速度计输出的z轴重力加速度;
23、采用以下公式计算,得到通过三轴陀螺仪数据解算的当前状态下的横滚角rollgyro,
24、
25、式中,rollg(n+1)为通过三轴陀螺仪数据解算的当前状态下的横滚角rollgyro,rollgn为通过三轴陀螺仪数据解算的前一状态下的横滚角,δroll为通过三轴陀螺仪数据解算的当前状态相对于前一状态的横滚角变化量,δt为当前状态与前一状态的时间差,也是探杆旋转过程中,相邻两次姿态求解的间隔时间,n为自然数,当n=0时,为初始静止状态,rollg0为0。
26、优选的,步骤s1和步骤s5中,探杆的旋转方向和速度均相同。
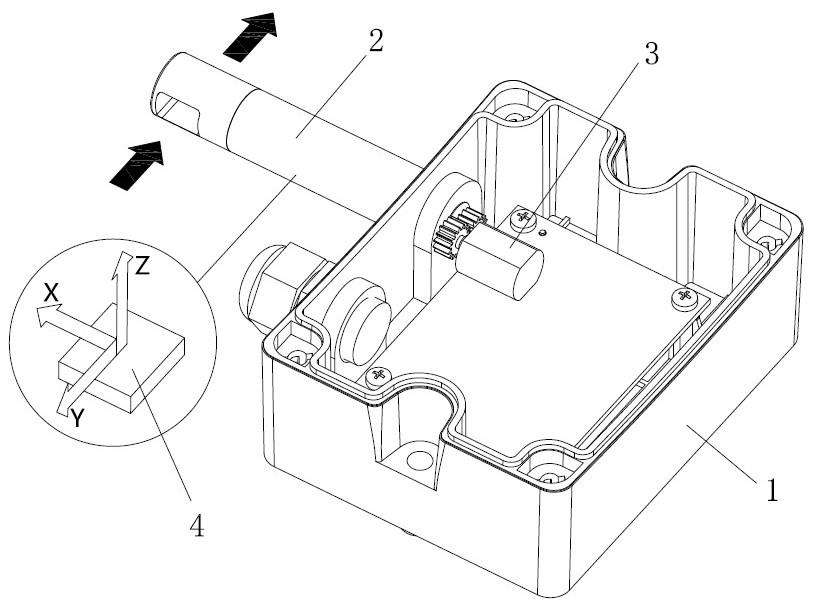
27、一种风速变送器,包括变送器本体、安装于变送器本体上的探杆、驱动探杆绕其轴线旋转的电机、安装于探杆上的imu惯性测量单元和传感器单元;
28、变送器本体,具有分别与所述imu惯性测量单元和传感器单元通信连接的mcu处理单元;
29、所述mcu处理单元,一方面控制电机工作,驱动探杆绕其轴线至少旋转一周;另一方面在探杆旋转过程中,接收来自传感器单元和imu惯性测量单元的信息并进行滤波处理,每隔一定时间δt针对当前状态下所得到的、滤波后的x、y、z轴的重力加速度值和角速度值进行姿态求解,并将两种姿态进行互补融合,得到探杆的多个第一横滚角,并记录最大风速值所对应x、y、z轴的重力加速度值和角速度值求解得到的横滚角,作为第二横滚角;再一方面,控制电机工作,驱动探杆再次绕其轴线旋转,再次根据来自传感器单元和imu惯性测量单元的信息得到至少一个第三横滚角,当第三横滚角与第二横滚角之差小于2倍toffset时,控制电机停止工作,探杆停止旋转;
30、
31、式中,t0为探杆绕其轴线旋转1周的用时,δt为探杆旋转过程中,相邻两次姿态求解的间隔时间;
32、imu惯性测量单元,与mcu处理单元通信连接,用于采集探杆在x、y、z轴的重力加速度值和角速度值,并将其传输至mcu处理单元;
33、传感器单元,用于实时采集风速信息并将其传输至mcu处理单元;
34、电机,一方面与mcu处理单元通信连接,另一方面与探杆相连以驱动探杆绕其轴线旋转。
35、优选的,
36、所述mcu处理单元,还用于采用递推平均滤波法将连续取得的n个采样值看成一个队列,队列的长度固定为n,每次采集到的新数据放入队尾,并扔掉原来队首的数据,把队列中的n个数据进行算术平均运算,获得新的滤波结果,完成滤波。
37、优选的,
38、采用以下公式计算,得到所述第一横滚角和第三横滚角,
39、
40、式中,roll(n+1)为当前状态下的横滚角,rolln为前一状态下的横滚角,rollacc为通过三轴加速度计数据计算得到的当前状态下的横滚角,rollgyro为通过三轴陀螺仪数据计算得到的当前状态下的横滚角,k为系数,取值范围为0.5-0.8,n为自然数,即一系列状态0、1、2、3...,当n=0时,为初始静止状态。
41、优选的,
42、采用以下公式计算,得到初始静止状态下的横滚角roll0,
43、
44、式中,ay0为初始静止状态下三轴加速度计输出的y轴重力加速度,az0为初始静止状态下三轴加速度计输出的z轴重力加速度;
45、采用以下公式计算,得到通过三轴加速度计数据解算的当前状态下的横滚角rollacc,
46、
47、式中,ayacc为当前状态下三轴加速度计输出的y轴重力加速度,azacc为当前状态下三轴加速度计输出的z轴重力加速度;
48、采用以下公式计算,得到通过三轴陀螺仪数据解算的当前状态下的横滚角rollgyro,
49、
50、式中,rollg(n+1)为通过三轴陀螺仪数据解算的当前状态下的横滚角rollgyro,rollgn为通过三轴陀螺仪数据解算的前一状态下的横滚角,δroll为通过三轴陀螺仪数据解算的当前状态相对于前一状态的横滚角变化量,δt为当前状态与前一状态的时间差,也是探杆旋转过程中,相邻两次姿态求解的间隔时间,n为自然数,当n=0时,为初始静止状态,rollg0为0。
51、优选的,所述探杆两次旋转的旋转方向和速度均相同。
52、本发明的有益效果在于:
53、1、利用imu惯性测量单元实时获取探杆x、y、z三个轴的重力加速度和角速度数据,结合传感器单元实时获取的风速数据,来调整探杆的角度,尽可能的保证探杆进风口与风向之间的夹角小于5度,相对于现有技术人工调整的方式,具备更高的精确度,更高的效率,使得风速变送器更加智能化。
54、2、解决了热膜式风速变送器在工厂标定时引入的干扰因素,标定数据更加准确,提高了变送器的测量精度,加快生产效率。
55、3、风速变送器探杆与风向角度的调整由变送器自动完成,不需要安装人员手动调整,方便客户安装,角度误差小,测量结果更加精确,缩短安装周期。
- 还没有人留言评论。精彩留言会获得点赞!