一种基于5G和北斗的卫生应急作业平台系统及方法与流程
本发明涉及移动设备定位领域,尤其涉及一种基于5g和北斗的卫生应急作业平台系统及方法。
背景技术:
1、由于在发生卫生灾害事件之后,为了实现科学应急处理,需要多种卫生应急数据的辅助支撑,如:现场环境数据、终端设备运行状态数据以及历史数据,这些卫生应急数据共同构成了应急救援场景下的多源异构数据;而现有的数据存储与检索系统通常将多源异构数据按不同形式或模态进行分类并单独处理,从而导致多源异构数据之间缺乏关联与接入不统一等问题。
2、此外,卫生应急领域普遍面临着应急灾情精准快速获取、流调车精准定位等需求,而现有的定位系统多采用全球卫星导航系统,这种方法在开阔区域定位精度较高,但在地下、洞穴、丛林等场景,受到遮挡及信号噪声等影响,定位精度严重下降甚至形成定位死区;并且由于gnss(global navigation satellite system,全球导航卫星系统)信号是 l1 波段、抗干扰能力差、穿透能力弱,卫生应急设备在接收gnss信号的过程中容易受到影响,从而导致数据更新缓慢、导致导航定位精度差、时效性差等问题。
技术实现思路
1、为了解决上述技术问题,本发明实施例提出了一种基于5g和北斗的卫生应急作业平台系统及方法,能够有效整合不同的卫生应急设备所采集到的多源异构数据,并且实现卫生应急设备的高精度定位。
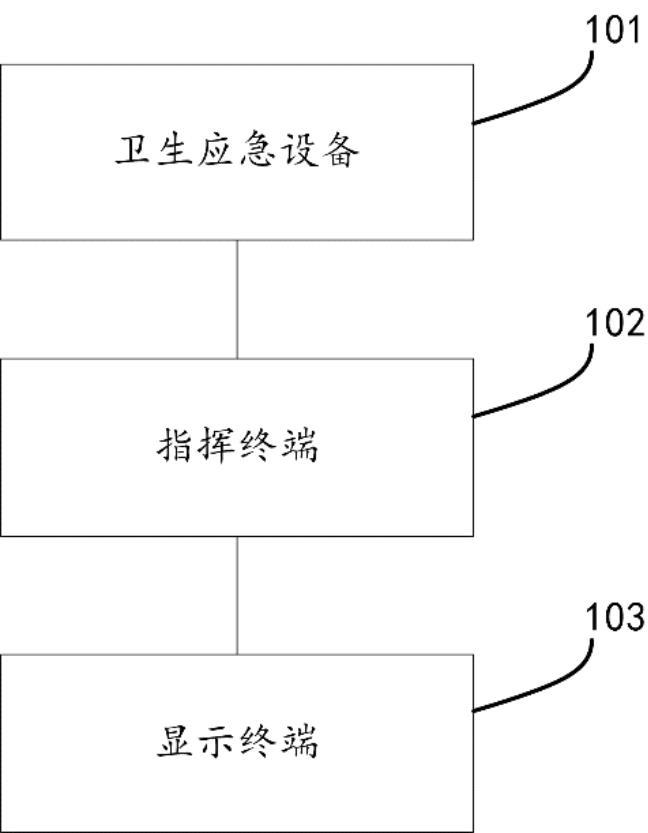
2、为了实现上述目的,本发明实施例提供了一种基于5g和北斗的卫生应急作业平台系统,包括:指挥终端、卫生应急设备和显示终端;
3、所述指挥终端被配置为:
4、通过5g网络获取所述卫生应急设备的多源异构数据;其中,所述多源异构数据包括北斗卫星数据;
5、对所述多源异构数据进行整合处理,得到目标数据;
6、采用基于滑模观测器的扩展卡尔曼滤波算法,根据所述目标数据确定所述卫生应急设备的定位位置;
7、基于所述定位位置生成定位数据,将所述定位数据发送至所述显示终端,以使所述显示终端显示所述定位位置。
8、进一步的,所述卫生应急设备包括若干前端设备,所述多源异构数据包括每一所述前端设备的源数据,所述目标数据包括每一所述前端设备的整合数据;则,所述对所述多源异构数据进行整合处理,得到目标数据,具体包括:采用xml schema构建元数据库;其中,所述元数据库包括元数据库管理器;通过所述元数据库管理器,根据每一所述前端设备的源数据在所述元数据库中进行注册,以在所述元数据库中生成每一所述前端设备的整合数据。
9、进一步的,在所述得到目标数据之后,所述指挥终端还被配置为:根据预设的需求信息,对所述元数据库进行查询处理,得到若干查询结果;其中,所述查询处理包括查询验证、查询分析、查询分解或查询转换;对所述查询结果进行整合,根据预设的数据格式要求,对整合后的查询结果进行封装。
10、进一步的,所述需求信息包括接收到的视频需求信息,所述查询结果包括视频数据;则,在所述得到目标数据之后,所述指挥终端还被配置为:根据所述视频需求信息,对所述元数据库进行查询处理,得到与所述卫生应急设备对应的视频数据;其中,与所述卫生应急设备对应的视频数据是由所述卫生应急设备拍摄的视频所确定的;将与所述卫生应急设备对应的视频数据发送至显示终端,以使所述显示终端播放所述卫生应急设备拍摄的视频。
11、进一步的,所述采用基于滑模观测器的扩展卡尔曼滤波算法,根据所述目标数据确定所述卫生应急设备的定位位置,具体包括:获取所述目标数据中包含的导航卫星数据和传感器数据;其中,所述导航卫星数据是由所述卫生应急设备接收到的北斗卫星数据所确定的,所述传感器数据是由设于所述卫生应急设备上的传感器采集到的数据所确定的;基于所述导航卫星数据和传感器数据进行加权最小二乘计算,以构建初始化状态向量;采用扩展卡尔曼滤波算法,根据所述初始化状态向量确定第一状态预测协方差;根据预先构建的滑模观测器,对所述第一状态预测协方差进行更新,得到第二状态预测协方差以确定所述定位位置。
12、进一步的,所述滑模观测器的构建方法包括:
13、基于所述目标数据中包含的测量信息,构建测量值如式(1);
14、;(1)
15、根据所述测量值,构建第一系统如式(2):
16、;(2)
17、构建所述第一系统的误差如式(3):
18、;(3)
19、根据所述第一系统的误差,构建积分滑模面如式(4):
20、;(4)
21、根据所述积分滑模面,构建李雅普诺夫函数如式(5):
22、;(5)
23、对所述李雅普诺夫函数进行求导如式(6):
24、;(6)
25、基于滑模观测器理论、所述第一系统、所述第一系统的误差、所述积分滑模面和求导后的李雅普诺夫函数,构造滑模观测器如式(7):
26、;(7)
27、基于所述第一系统和所述滑模观测器,计算得到所述第一系统的输入量的最终估计值如式(8);
28、;(8)
29、其中,所述测量信息包括所述卫生应急设备的经度、纬度、高度、经度方向速度、纬度方向速度和高度方向速度,为所述测量值,x为所述第一系统的状态参数,为x的导数,f为第一系统矩阵,g为噪声驱动矩阵,d为所述第一系统的输入量,y为所述第一系统的输出变量,为x的估计值,l为滑模观测器增益,为符号函数,为所述第一系统的输入量的最终估计值,k为控制变量,z为滑模趋近率,e为第一系统的误差,s为积分滑模面,v为李雅普诺夫函数,t表示进行转置运算,为v的导数,为的导数。
30、进一步的,所述根据预先构建的滑模观测器,对所述第一状态预测协方差进行更新,得到第二状态预测协方差以确定所述定位位置,具体包括:
31、构建线性化系统的观测方程如式(9):
32、;(9)
33、对所述观测方程进行近似计算,得到近似观测方程如式(10):
34、;(10)
35、基于所述滑模观测器和所述近似观测方程,对所述第一状态预测协方差进行更新,得到第二状态预测协方差如式(11):
36、
37、其中,为非线性系统的状态函数,h为非线性系统的量测函数,为第k-1次的第一高斯白噪声,为第k次的第二高斯白噪声,为第k次的状态向量,为第k次的量测向量,为预设的第一估值点,为预设的第二估值点,为的雅克比矩阵,为的雅克比矩阵,为数学期望的计算式,为的最佳估计值,为所述第二状态预测协方差,为估计方差,为符合方差,为第k-1次的状态向量,t表示进行转置运算。
38、进一步的,所述传感器数据包括惯性测量单元数据和气压计传感单元数据;所述惯性测量单元数据是由设于所述卫生应急设备上的惯性测量单元采集到的数据所确定的,用于表征所述卫生应急设备的速度和加速度;所述气压计传感单元数据是由设于所述卫生应急设备上的气压计传感器采集到的数据所确定的,用于表征所述卫生应急设备的高度。
39、进一步的,所述指挥终端还被配置为:当与所述卫生应急设备之间的5g网络连接状态不满足预设的通信条件时,通过卫星通信链路接收所述卫生应急设备发送的多源异构数据;其中,所述卫生应急设备是由所述若干前端设备自组网后所组成的。
40、本发明实施例还提供了一种基于5g和北斗的卫生应急作业方法,包括:
41、通过5g网络获取卫生应急设备的多源异构数据;其中,所述多源异构数据包括北斗卫星数据;
42、对所述多源异构数据进行整合处理,得到目标数据;
43、采用基于滑模观测器的扩展卡尔曼滤波算法,根据所述目标数据确定所述卫生应急设备的定位位置;
44、基于所述定位位置生成定位数据,将所述定位数据发送至显示终端,以使所述显示终端显示所述定位位置。
45、综上,本发明具有以下有益效果:
46、采用本发明实施例,通过使用xml技术能够整合各级前端设备的多源异构数据,以实现各级前端设备的异构数据间的数据交换,且在gnss信号不好难以获得精准的导航卫星数据时,通过对多种传感器的数据融合尤其是利用了惯性测量单元数据来进行辅助定位,能够实现卫生应急设备在复杂环境下的高精度定位,还能够实现信息快速采集和低时延传输。
- 还没有人留言评论。精彩留言会获得点赞!