电气设备射线检测系统的制作方法
本发明涉及电力设备无损检测,特别是涉及一种电气设备射线检测系统。
背景技术:
1、现目前,射线检测作为一种无损检测技术,在电力设备检测领域得到了广泛的应用。在电力系统中,用于电气设备无损检测的射线常见的是x射线和γ射线,x射线是现目前对电力设备进行无损检测最常用的射线。
2、以x射线在电力设备检测上的运用为例,由于相关的检测系统包括x射线机和成像板等,同时检测过程中具有多个检测区域,为了提高检测效率以及减小检测过程中的劳动强度,现有射线检测系统一般搭载在检测车上。为适应各自检测时射线发射装置与成像板的位置参数,现有技术中以出现了通过机械臂、成像板搭载在机械臂上,利用机械臂变形实现所述位置参数调节的检测系统。具体方案如申请号为:cn201710242316.5、cn202210979437.9等所提供的方案。另外,电力设备射线检测过程中,一般是将控制单元设置为远离检测区域,以避免检测过程中对现场检测人员造成辐射伤害,由于射线检测可以在电力设备的运行期间实施,考虑到现场可能出现的电气设备操作人员,现有技术中具有按照辐射值对空间进行区域划分的技术方案,在这些技术方案中,通过采集现场的辐射情况实现空间区域划分,具体方案如发明创造名称为一种变电站射线检测辐射安全防护方法,申请号为cn201811455408.2所提供的技术方案。
3、射线检测在电气设备检测上的运用相较于传统人工检测方式具有突出的特点,对用于电气设备射线检测的检测系统进行进一步优化有利于推进射线检测在电器设备检测上的更进一步运用。
技术实现思路
1、针对上述提出的优化用于电气设备射线检测的检测系统的技术问题,本发明提供了一种电气设备射线检测系统。采用本方案,不仅可使得辐射检测装置能够适应当下的检测位置,同时辐射检测装置可获得多个位置的数据,通过提高辐射检测系统障碍通过性能,可达到提高电气设备检测效率、简化系统结构的目的。
2、针对上述问题,本发明提供的电气设备射线检测系统通过以下技术要点来解决问题:电气设备射线检测系统,包括机械臂以及安装在机械臂前端的成像板,还包括用于检测现场射线辐射强度的辐射检测装置,所述辐射检测装置安装在安装杆上,辐射检测装置在安装杆长度方向上的位置可调;
3、所述安装杆通过第二旋转部件安装于机械臂的前端,所述第二旋转部件用于驱动安装杆绕安装杆与机械臂之间的连接轴转动。
4、本方案中,所述机械臂通过变形,用于改变安装在其前端的成像板在空间中的位置,所述成像板作为成像系统的组成部件,用于射线分布计量探测,所述辐射检测装置用于检测其所在位置的射线辐射强度,通过所检测到的辐射强度值,可用于检测现场的辐射场计算,与区分布检测现场的危险区域、安全区域。
5、区别于现有技术,本方案中,通过将辐射检测装置设置在机械臂的前端,在针对任意检测区域调整时,在机械臂变形过程中,辐射检测装置的位置调整伴随成像板的位置调整,这样,可使得辐射检测装置始终位于关联成像板位置的位置区域内,这样可实现:成像板位置调整过程中辐射检测装置的位置调整具有较高的效率。
6、本方案中,通过将辐射检测装置设置为在安装杆长度方向上的位置可调、安装杆在第二旋转部件的作用下可以绕安装杆与机械臂之间的连接轴转动,这样,在利用射线检测系统对电力设备进行射线检测的过程中,通过辐射检测装置沿着安装杆运动和/或安装杆绕所述连接轴转动,可改变辐射检测装置在空间中的位置,通过不同位置所获取到的辐射强度检测值,在数据量更为丰富的情况下,可以用于建立更为准确的检测现场辐射场。
7、本方案中,通过将辐射检测装置安装在安装杆上,安装杆相对于机械臂可绕连接轴转动,这样,在配置成像板位置的过程中,比如成像板需要由gis(气体绝缘开关设备)的一侧,横跨gis以运动到gis的另一侧时,当横跨位置为卧式容器状的设备结构时,可通过第二旋转部件将安装杆旋转为水平杆,当横跨位置为立式容器状的设备结构时,可通过第二旋转部件将安装杆旋转为竖直杆,这样,可有效降低机械臂前端的被举升高度、提高安装杆的空间通过性,并达到减小对机械臂的尺寸要求、运动参数要求的目的,同时,关于对安装杆的越障能力,该结构还具有可减小对机械臂上关节的设计要求、动作复杂程度要求、简化机械臂结构设计的特点。
8、作为所述的电气设备射线检测系统更进一步的技术方案:
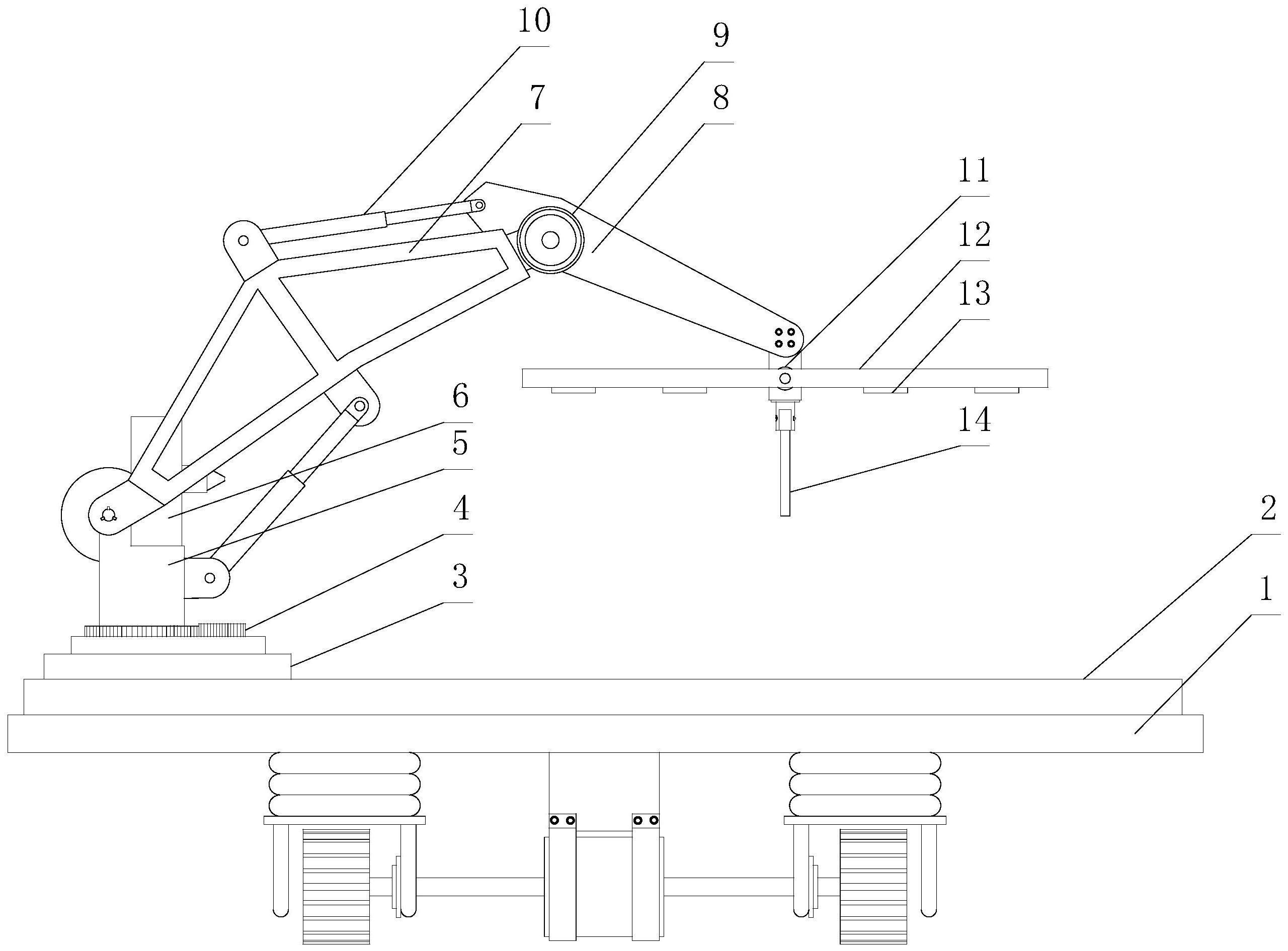
9、所述机械臂包括第一杆件以及第二杆件,所述第一杆件与第二杆件铰接连接;
10、还包括第一步进电机以及第一液压伸缩装置,第一杆件与第二杆件通过第一步进电机铰接连接,第一液压伸缩装置包括液压油缸,所述液压油缸的缸体端以及活塞杆端两端中,其中一端与第一杆件铰接连接,另一端与第二杆件铰接连接,所述第一步进电机以及第一液压伸缩装置均可用于驱动第二杆件相对于第一杆件绕第一步进电机的转子转动。现有技术中,关于用于电力设备射线检测的机械臂一般设置为包括多个臂段,相互连接的臂段通过铰接的方式实现可转动连接。以上方案中,所述第一杆件以及第二杆件均作为机械臂的臂段,区别于现有技术,本方案将第一步进电机的转轴作为第一杆件与第二杆件的铰接轴,同时设置第一液压伸缩装置,首先,在第一液压伸缩装置以及第一步进电机两者在用于第二杆件相对于第一杆件的角度调整时,两者均具有机械臂前端位置调节精度高的特点(第一液压伸缩装置相对于如气压伸缩装置),另外,当所述角度调整需求较大时,可以利用第一液压伸缩装置实现第二杆件前端位置粗略调整,此时,第一步进电机上产生随第一液压伸缩装置长度变化同步的随转,完成粗略调整后,进一步利用第一步进电机实现第二杆件前端位置精确调整,此时,第一液压伸缩装置产生同步于第一步进电机转动的长度变化,故本方案还具有机械臂前端位置调节精度高、机械臂前端位置调整效率高、机械臂整体重量较轻以及体积较小的特点。在具体运用中,可设置为机械臂由第一杆件和第二杆件组成,成像板以及安装杆均安装在第二杆件的前端,并且,所述第二旋转部件也为角度调整准确、体积较小的步进电机,连接轴为该步进电机的转轴,第二旋转部件的轴线与第一步进电机的轴线平行。
11、还包括第一行走车,所述第一行走车上设置有沿着第一行走车宽度方向延伸的轨道;
12、还包括安装在所述轨道上并可沿着轨道延伸方向运动的第二行走车;
13、所述机械臂的后端安装于第二行走车上。本方案中,利用第一行走车行进,达到适应沿着进行路线的检测位置分布,利用第二行走车,达到适应沿着进行道路宽度方向的检测位置分布,这样,可提高本系统的检测位置适应能力;另外,在第一行走车行进过程中,根据机械臂的状态,通过第二行走车将机械臂迁移至使得机械臂的重心尽可能位于第一行走车车宽方向中部的位置,这样,在保证本系统行进过程中抗倾倒能力可靠的情况下,有利于提升本系统的行进速度。在具体实施时,较优的,第一行走车以及第二行走车均采用电机驱动。
14、所述第二行走车上安装有第一旋转组件,所述第一旋转组件上安装有底座;
15、还包括射线发射装置,所述射线发射装置以及机械臂的后端均安装在底座上;
16、所述第一旋转组件用于驱动底座绕平行于第一行走车高度方向的旋转轴转动;
17、机械臂的后端与底座可转动连接,还包括用于驱动机械臂相对于底座转动的第一驱动装置;
18、所述射线发射装置相对于底座可转动,还包括用于驱动射线发射装置相对于底座转动的第二驱动装置。本方案中,通过第一旋转组件,可使得机械臂的后端在第一旋转组件的作用下能够旋转,将射线发射装置以及机械臂的后端均设置在底座上,用于实现成像板与射线发射装置能够同步于底座转动,第一驱动装置用于实现机械臂相对于底座举升角度调节,第二驱动装置用于实现射线发射装置的射线发射角度调节。本方案旨在提升本系统对检测位置的适应能力。
19、所述第一旋转组件包括驱动电机、安装在驱动电机转子上的主动齿轮、与底座固定连接的被动齿轮;
20、所述底座与被动齿轮同心设置并设置在被动齿轮的上方,驱动电机安装于第二行走车上,第二行走车上还设置有推力轴承,所述推力轴承与被动齿轮下方的齿轮轴相配合,所述主动齿轮与被动齿轮齿啮合。本方案提供了一种第一旋转组件的具体实现方式,具体的,驱动电机用于带动主动齿轮转动,推力轴承用于约束被动齿轮在第二行走车上的位置,被动齿轮在主动齿轮的作用下转动,同轴安装于被动齿轮上的底座同步于被动齿轮转动。该方案具有结构简单、重心位置低、第一旋转组件负载能力强的特点。较优的,为控制底座的旋转角度、在空间中合理布置第一旋转组件,主动齿轮驱动被动齿轮的方式是减速传动。
21、所述第一驱动装置包括第二步进电机以及第二液压伸缩装置,机械臂与底座通过第二步进电机铰接连接,第二液压伸缩装置包括液压油缸,所述液压油缸的缸体端以及活塞杆端两端中,其中一端与机械臂铰接连接,另一端与底座铰接连接,所述第二步进电机以及第二液压伸缩装置均可用于驱动机械臂相对于底座绕第二步进电机的转子转动。本方案与以上通过第一步进电机以及第一液压伸缩装置实现第二杆件相对于第一杆件角度调整方案类似,均为利用液压伸缩装置提高机械臂姿态调整幅度、利用步进电机保障机械臂姿态调整精度的技术方案。在仅由第一杆件与第二杆件组成的方案中,第二步进电机安装在底座上,第一杆件连接在第二步进电机的转子上,第二液压伸缩装置的一端与底座铰接连接,另一端与第一杆件铰接连接。
22、所述连接轴的轴线沿着第一行走车的长度方向。本方案为对连接轴进行进一步限定的优选方案,采用该方案,可将安装杆的状态调整为水平杆、竖直杆以及其他状态,可较好的适应第一行走车通常运用于水平地面、第一行走车行进的路线一般沿着待检测电力设备延伸的运用特点。
23、所述安装杆为直杆,辐射检测装置通过第三行走车安装于安装杆上,所述辐射检测装置在安装杆上的位置调整通过第三行走车沿着安装杆的长度方向运动实现。本方案中,为直杆的安装杆在通过转动调整姿态后,在进行电气设备跨过越障时对空间大小的要求较低;在第三行走车的作用下,通过远程控制,可在电气设备射线检测过程中随时调整辐射检测装置在安装杆上的位置,以使得检测现场辐射值采集和电气设备射线检测均可高效进行。
24、所述安装杆上配置有多个辐射检测装置,各辐射检测装置在安装杆上的位置均可调。本方案中,利用多个辐射检测装置可实现:同时检测到不同位置的辐射值以用于丰富辐射场建立的数据库,各辐射检测装置在安装杆上的位置均可调用于获得数量更多的针对不同位置的检测结果。
25、所述第一行走车包括行走轮、用于驱动行走轮转动的动力单元,用于实现第一行走车转向的转向单元、用于实现第一行走车远程控制的控制单元;
26、所述第一行走车或机械臂上还搭载有用于检测地面路况信息的视频采集装置;
27、所述第一行走车上还搭载有用于检测第一行走车运动状态、倾斜状态的状态采集装置。本方案提供了一种第一行走车可通过控制单元远程控制,并按照要求进行方向进行行驶的技术方案,同时远程操作者可通过视频采集装置获取到第一行走车所在位置的路况,以更好的指引第一行走车完成位置转移、避障,所述状态采集装置优选采用三轴加速度传感器,用于指示第一行走车的行走参数、倾斜度变化等,以提高本系统运行的安全性。
28、本发明具有以下有益效果:
29、本方案中,通过将辐射检测装置设置在机械臂的前端,在针对任意检测区域调整时,在机械臂变形过程中,辐射检测装置的位置调整伴随成像板的位置调整,这样,可使得辐射检测装置始终位于关联成像板位置的位置区域内,这样可实现:成像板位置调整过程中辐射检测装置的位置调整具有较高的效率。
30、本方案中,通过将辐射检测装置设置为在安装杆长度方向上的位置可调、安装杆在第二旋转部件的作用下可以绕安装杆与机械臂之间的连接轴转动,这样,在利用射线检测系统对电力设备进行射线检测的过程中,通过辐射检测装置沿着安装杆运动和/或安装杆绕所述连接轴转动,可改变辐射检测装置在空间中的位置,通过不同位置所获取到的辐射强度检测值,在数据量更为丰富的情况下,可以用于建立更为准确的检测现场辐射场。
31、本方案中,通过将辐射检测装置安装在安装杆上,安装杆相对于机械臂可绕连接轴转动,这样,在配置成像板位置的过程中,比如成像板需要由gis(气体绝缘开关设备)的一侧,横跨gis以运动到gis的另一侧时,当横跨位置为卧式容器状的设备结构时,可通过第二旋转部件将安装杆旋转为水平杆,当横跨位置为立式容器状的设备结构时,可通过第二旋转部件将安装杆旋转为竖直杆,这样,可有效降低机械臂前端的被举升高度、提高安装杆的空间通过性,并达到减小对机械臂的尺寸要求、运动参数要求的目的,同时,关于对安装杆的越障能力,该结构还具有可减小对机械臂上关节的设计要求、动作复杂程度要求、简化机械臂结构设计的特点。
- 还没有人留言评论。精彩留言会获得点赞!