基于GPS定位的农机导航路径规划方法及系统与流程
本申请涉及导航路径规划领域,且更为具体地,涉及一种基于gps定位的农机导航路径规划方法及系统。
背景技术:
1、我国农业自动导航技术在精准农业技术的支持下得到了快速发展,并广泛应用于农业生产的各个过程中。自动导航系统的路径规划功能可以使拖拉机在作业区域内覆盖整块农田,减少重叠路径,提高作业效率和作业质量。农机作业路径规划控制技术作为农机自动导航系统的核心控制技术之一,根据农田地块的实际情况设计高效的导航路线,使农机能够基于这条路径完成农业生产工作。
2、然而,目前农业自动导航技术在实际农业生产中主要采用的是农机直线导航技术,即ab直线导航。用户在实际作业地块中指定a点和b点的坐标位置,系统根据这两点生成一系列平行的导航基准路径,农机将跟踪这些路径进行农田作业。然而,在每条直线路径的尽头,农机需要行驶员手动操纵进行转向,以完成地头转向操作。目前市面上的农机导航产品广泛应用于各大农场,但这些导航系统不具备自动转向功能。
3、尽管农机地头转向和路径规划控制技术在研究中有一定突破,但相关研究仍然进展缓慢。目前农业导航领域的路径规划仍停留在作物行跟踪和地头转向无约束最优路径规划阶段。这意味着目前的农机导航系统在路径规划方面还存在一些限制和挑战,需要进一步研究和改进。
4、因此,期望一种优化的农机导航路径规划方案。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种基于gps定位的农机导航路径规划方法及系统。其可以更准确地确定农机的位置和方向,提高路径规划的精度。
2、根据本申请的一个方面,提供了一种基于gps定位的农机导航路径规划方法,其包括:
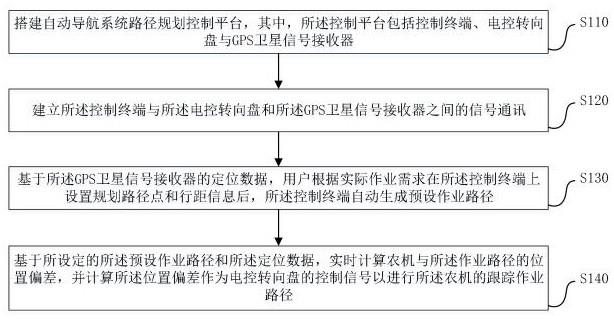
3、搭建自动导航系统路径规划控制平台,其中,所述控制平台包括控制终端、电控转向盘与gps卫星信号接收器;
4、建立所述控制终端与所述电控转向盘和所述gps卫星信号接收器之间的信号通讯;
5、基于所述gps卫星信号接收器的定位数据,用户根据实际作业需求在所述控制终端上设置规划路径点和行距信息后,所述控制终端自动生成预设作业路径;以及
6、基于所设定的所述预设作业路径和所述定位数据,实时计算农机与所述作业路径的位置偏差,并计算所述位置偏差作为电控转向盘的控制信号以进行所述农机的跟踪作业路径。
7、根据本申请的另一个方面,提供了一种基于gps定位的农机导航路径规划系统,其包括:
8、平台搭建模块,用于搭建自动导航系统路径规划控制平台,其中,所述控制平台包括控制终端、电控转向盘与gps卫星信号接收器;
9、信号通讯建立模块,用于建立所述控制终端与所述电控转向盘和所述gps卫星信号接收器之间的信号通讯;
10、预设作业路径生成模块,用于基于所述gps卫星信号接收器的定位数据,用户根据实际作业需求在所述控制终端上设置规划路径点和行距信息后,所述控制终端自动生成预设作业路径;以及
11、偏差计算模块,用于基于所设定的所述预设作业路径和所述定位数据,实时计算农机与所述作业路径的位置偏差,并计算所述位置偏差作为电控转向盘的控制信号以进行所述农机的跟踪作业路径。
12、与现有技术相比,本申请提供的基于gps定位的农机导航路径规划方法及系统,其首先搭建自动导航系统路径规划控制平台,其中,所述控制平台包括控制终端、电控转向盘与gps卫星信号接收器,接着,建立所述控制终端与所述电控转向盘和所述gps卫星信号接收器之间的信号通讯,然后,基于所述gps卫星信号接收器的定位数据,用户根据实际作业需求在所述控制终端上设置规划路径点和行距信息后,所述控制终端自动生成预设作业路径,最后,基于所设定的所述预设作业路径和所述定位数据,实时计算农机与所述作业路径的位置偏差,并计算所述位置偏差作为电控转向盘的控制信号以进行所述农机的跟踪作业路径。这样,可以更准确地确定农机的位置和方向,提高路径规划的精度。
技术特征:
1.一种基于gps定位的农机导航路径规划方法,其特征在于,包括:
2.根据权利要求1所述的基于gps定位的农机导航路径规划方法,其特征在于,基于所设定的所述预设作业路径和所述定位数据,实时计算农机与所述作业路径的位置偏差,并计算所述位置偏差作为电控转向盘的控制信号以进行所述农机的跟踪作业路径,包括:
3.根据权利要求2所述的基于gps定位的农机导航路径规划方法,其特征在于,对所述多个预定时间点的位置偏差数据进行位置偏差模式时序特征提取以得到位置偏差时序特征,包括:
4.根据权利要求3所述的基于gps定位的农机导航路径规划方法,其特征在于,所述偏差时序模式特征提取器为包含第一卷积层和第二卷积层的位置偏差时序模式特征提取器。
5.根据权利要求4所述的基于gps定位的农机导航路径规划方法,其特征在于,基于所述位置偏差时序特征,确定当前时间点的电控转向盘的推荐角度控制值,包括:
6.根据权利要求5所述的基于gps定位的农机导航路径规划方法,其特征在于,还包括训练步骤:用于对所述包含第一卷积层和第二卷积层的位置偏差时序模式特征提取器和所述解码器进行训练。
7.根据权利要求6所述的基于gps定位的农机导航路径规划方法,其特征在于,所述训练步骤,包括:
8.根据权利要求7所述的基于gps定位的农机导航路径规划方法,其特征在于,对所述训练多尺度位置偏差时序特征向量进行特征秩表达的语义信息均一化激活以得到激活后训练多尺度位置偏差时序特征向量,包括:
9.一种基于gps定位的农机导航路径规划系统,其特征在于,包括:
10.根据权利要求9所述的基于gps定位的农机导航路径规划系统,其特征在于,所述偏差计算模块,包括:
技术总结
本申请涉及导航路径规划领域,公开了一种基于GPS定位的农机导航路径规划方法及系统。其首先搭建自动导航系统路径规划控制平台,其中,所述控制平台包括控制终端、电控转向盘与GPS卫星信号接收器,接着,建立所述控制终端与所述电控转向盘和所述GPS卫星信号接收器之间的信号通讯,然后,基于所述GPS卫星信号接收器的定位数据,用户根据实际作业需求在所述控制终端上设置规划路径点和行距信息后,所述控制终端自动生成预设作业路径,最后,基于所设定的所述预设作业路径和所述定位数据,实时计算农机与所述作业路径的位置偏差,并计算所述位置偏差作为电控转向盘的控制信号以进行所述农机的跟踪作业路径。这样,可以更准确地确定农机的位置和方向,提高路径规划的精度。
技术研发人员:曹景兴,张永宏,夏高原,张昕宇,董天天,宋阳,曹海啸
受保护的技术使用者:无锡新松机器人自动化有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!