一种集成式风速风向测量仪的制作方法
本申请涉及风速风向测量仪领域,尤其是一种集成式风速风向测量仪。
背景技术:
1、风载荷测量是气象观测领域的最基本内容之一,风载荷测量最主要需要测量风速和风向两个物理量。目前常见的用于测量风载荷的仪器包括机械测风仪、超声波测风仪、动压力式测风仪、热式测风仪、激光测风雷达和风廓线测风雷达等。
2、风杯式机械测风仪通过风杯带动一套机械旋转部件进行旋转来测量风速,利用风向标带动另一套机械旋转部件进行旋转来测量风向,是众多用于测量风载荷的仪器中原理最简单、应用最广泛的仪器。
3、虽然风杯式机械测风仪简单可靠,但是为了保证能够分别测量得到风速和风向,需要使用两套独立的机械旋转部件,机械结构复杂而容易导致可靠性不高,难以满足长期观测需要,受长期磨损影响,风杯式机械测风仪的使用寿命很难超过两年,尤其在极区低温、大风、多砂石等极端恶劣条件下更是难以正常投入使用。
技术实现思路
1、本申请针对上述问题及技术需求,提出了一种集成式风速风向测量仪,本申请的技术方案如下:
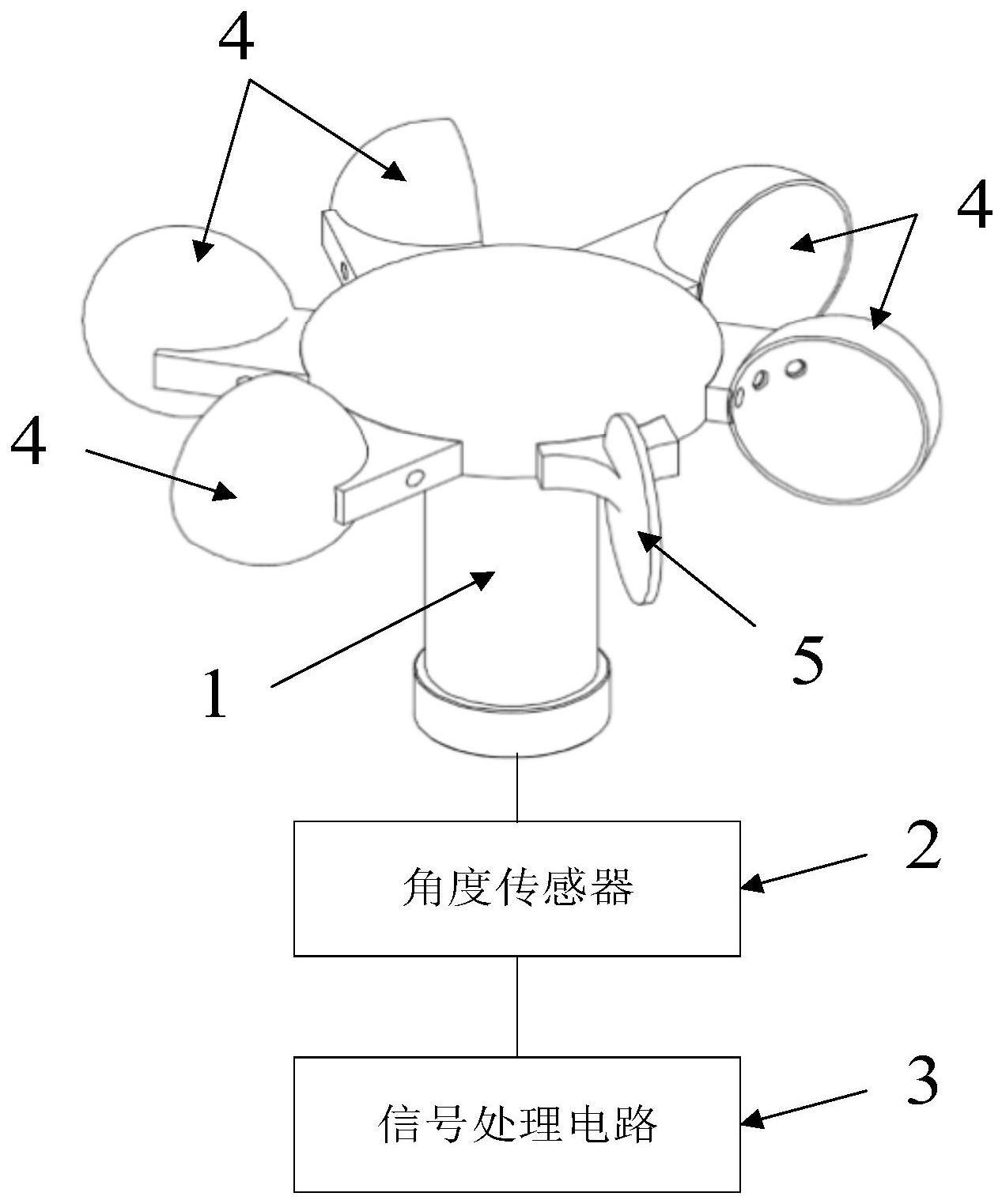
2、一种集成式风速风向测量仪,该集成式风速风向测量仪包括机械旋转部件、若干个受风组件、角度传感器和信号处理电路;
3、所有受风组件包括若干个风杯和一个风向标,所有风杯的结构均相同,风向标的结构与风杯的结构不同,所有受风组件在同一水平面上沿着周向均匀布设并固定在机械旋转部件上形成非对称旋转结构;
4、角度传感器固定在机械旋转部件上,信号处理电路电性连接角度传感器;
5、信号处理电路通过角度传感器采集非对称旋转结构的旋转角度曲线,并根据旋转角度曲线解算得到风速测量值和风向角度测量值,旋转角度曲线指示非对称旋转结构的旋转角度θ随时间的变化曲线。
6、其进一步的技术方案为,根据旋转角度曲线解算得到风向角度测量值包括:
7、将旋转角度曲线转换为旋转角速度曲线,旋转角速度曲线指示非对称旋转结构的旋转角速度ω随旋转角度θ的变化曲线;
8、将旋转角速度曲线转换为旋转角加速度曲线,旋转角加速度曲线指示非对称旋转结构的旋转角加速度δω随旋转角度θ的变化曲线;
9、根据旋转角速度曲线和旋转角加速度曲线解算得到风向角度测量值。
10、其进一步的技术方案为,根据旋转角度曲线解算得到风向角度测量值还包括:
11、当检测到非对称旋转结构的旋转角速度ω始终达到角速度阈值,且旋转角速度ω处于角速度波动范围内的持续时长达到稳定时长阈值时,确定非对称旋转结构处于高速稳定旋转状态,并执行根据旋转角速度曲线和旋转角加速度曲线解算得到风向角度测量值的步骤。
12、其进一步的技术方案为,当非对称旋转结构处于高速稳定旋转状态时,旋转角速度曲线和旋转角加速度曲线均呈正弦余弦曲线形式;
13、根据旋转角速度曲线和旋转角加速度曲线解算得到风向角度测量值包括:
14、根据旋转角速度曲线确定非对称旋转结构每旋转一周的角速度最大值θmax(ω)和角速度最小值θmin(w);
15、根据旋转角加速度曲线确定非对称旋转结构每旋转一周的角加速度最大值θmax(δω)和角加速度最小值θmin(δω);
16、根据角速度最大值θmax(w)、角速度最小值θmin(w)、角加速度最大值θmax(δω)和角加速度最小值θmin(δω)解算得到风向角度测量值。
17、其进一步的技术方案为,根据旋转角速度曲线和旋转角加速度曲线解算得到风向角度测量值还包括:
18、当检测到满足|θmax(δω)-θmin(w)|∈[90°-α,90°+α]且
19、|θmax(w)-θmax(δω)|∈[90°-α,90°+α]且
20、|θmin(δω)-θmax(w)|∈[90°-α,90°+α]且
21、|θmin(ω)-θmin(δω)|∈[90°-α,90°+α]时,执行根据角速度最大值θmax(w)、角速度最小值θmin(w)、角加速度最大值θmax(δω)和角加速度最小值θmin(δω)解算得到风向角度测量值的步骤;其中,α是预设的偏差角度;
22、否则重新确定角速度最大值θmax(w)、角速度最小值θmin(w)、角加速度最大值θmax(δω)和角加速度最小值θmin(δω)。
23、其进一步的技术方案为,解算得到风向角度测量值包括:
24、计算得到风向角度粗测值为:
25、
26、根据风向角度粗测值解算得到风向角度测量值。
27、其进一步的技术方案为,根据风向角度粗测值解算得到风向角度测量值包括:
28、确定风向角度测量值其中,δφ是风洞试验标定的风向误差角。
29、其进一步的技术方案为,确定角速度最大值θmax(ω)、角速度最小值θmin(w)、角加速度最大值θmax(δω)和角加速度最小值θmin(δω)包括:
30、分别确定旋转角速度曲线在连续多个旋转周期内的最大旋转角速度和最小旋转角速度,分别确定旋转角加速度曲线在连续多个旋转周期内的最大旋转角加速度和最小旋转角加速度,每个旋转周期覆盖360°的旋转角度;
31、采用聚类算法对多个旋转周期内的最大旋转角速度进行聚类得到角速度最大值θmax(ω),采用聚类算法对多个旋转周期内的最小旋转角速度进行聚类得到角速度最小值θmin(ω),采用聚类算法对多个旋转周期内的最大旋转角加速度进行聚类得到角加速度最大值θmax(δω),采用聚类算法对多个旋转周期内的最小旋转角加速度进行聚类得到角加速度最小值θmin(δω)。
32、其进一步的技术方案为,根据旋转角度曲线解算得到风速测量值包括:
33、确定风洞试验标定得到的风速角速度曲线中与非对称旋转结构的旋转角速度ω对应的风速作为风速测量值,风速角速度曲线指示风速与非对称旋转结构的旋转角速度之间的对应关系。
34、其进一步的技术方案为,风向标采用平板式结构。
35、本申请的有益技术效果是:
36、本申请公开了一种集成式风速风向测量仪,该集成式风速风向测量仪只需使用一套机械旋转部件,将包含风杯和风向标的受风组件固定集成在同一个机械旋转部件上形成非对称旋转结构,结合角度传感器即可解算得到风速测量值和风向角度测量值。该集成式风速风向测量仪由于减少了一套机械旋转部件,因此大大简化了机械结构和电路结构,提高了风速风向测量仪的集成度,降低了结构复杂度,且减少了系统整体磨损,因而提高了风速风向测量仪的使用可靠性。
37、该集成式风速风向测量仪利用受风组件结构不同导致旋转结构非对称,使得迎风和背风时受力出现非轴对称性的特性,利用非对称旋转结构的旋转角速度的变化就能分别巧妙解算出风速测量值和风向角度测量值,思路新颖,设计巧妙。该集成式风速风向测量仪尤其适用于极区极端恶劣环境中的风载荷测量。
技术特征:
1.一种集成式风速风向测量仪,其特征在于,所述集成式风速风向测量仪包括机械旋转部件(1)、若干个受风组件、角度传感器(2)和信号处理电路(3);
2.根据权利要求1所述的集成式风速风向测量仪,其特征在于,根据所述旋转角度曲线解算得到风向角度测量值包括:
3.根据权利要求2所述的集成式风速风向测量仪,其特征在于,所述根据所述旋转角度曲线解算得到风向角度测量值还包括:
4.根据权利要求3所述的集成式风速风向测量仪,其特征在于,当所述非对称旋转结构处于高速稳定旋转状态时,所述旋转角速度曲线和所述旋转角加速度曲线均呈正弦余弦曲线形式;
5.根据权利要求4所述的集成式风速风向测量仪,其特征在于,所述根据所述旋转角速度曲线和所述旋转角加速度曲线解算得到所述风向角度测量值还包括:
6.根据权利要求4所述的集成式风速风向测量仪,其特征在于,所述解算得到所述风向角度测量值包括:
7.根据权利要求6所述的集成式风速风向测量仪,其特征在于,所述根据所述风向角度粗测值解算得到所述风向角度测量值包括:
8.根据权利要求4所述的集成式风速风向测量仪,其特征在于,确定角速度最大值θmax(ω)、角速度最小值θmin(ω)、角加速度最大值θmax(δω)和角加速度最小值θmin(δω)包括:
9.根据权利要求2所述的集成式风速风向测量仪,其特征在于,所述根据所述旋转角度曲线解算得到风速测量值包括:
10.根据权利要求1所述的集成式风速风向测量仪,其特征在于,所述风向标(5)采用平板式结构。
技术总结
本申请公开了一种集成式风速风向测量仪,涉及风速风向测量仪领域,该集成式风速风向测量仪,将包含风杯和风向标的受风组件固定集成在同一个机械旋转部件上形成非对称旋转结构,通过角度传感器可以采集非对称旋转结构的旋转角度曲线,利用非对称旋转结构在迎风和背风时受力出现非轴对称性的特性,利用旋转角度曲线就能巧妙解算出风速测量值和风向角度测量值,该集成式风速风向测量仪由于减少了一套机械旋转部件,因此大大简化了机械结构和电路结构,提高了风速风向测量仪的集成度,降低了结构复杂度,且减少了系统整体磨损,因而提高了风速风向测量仪的使用可靠性,尤其适用于极区极端恶劣环境中的风载荷测量。
技术研发人员:曹可劲,李科,张旭,唐成涛,王昊,龚志贤
受保护的技术使用者:航天新气象科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!