一种推煤机及其在气膜煤场中的路径导航方法与流程
本发明涉及推煤机导航方法,具体涉及一种推煤机及其在气膜煤场中的路径导航方法。
背景技术:
1、气膜煤场中用推煤机作为辅助机械进行煤炭堆取作业,随着封闭煤场实施,推煤机的作业环境粉尘含量高、温度高,使得推煤机司机很难在封闭的煤场环境中进行作业,因而煤场的堆取煤工作通常采取无人操作、由推煤机自动导航实现推煤作业。
2、自动导航通常是采用gps定位、wi-fi定位、蓝牙定位、射频定位、uwb定位,根据获取的位置分析得出行走路径,推煤机根据路径进行推煤作业,但是气膜煤场中存在若干辆推煤机,两辆在路径上存在重叠的推煤机之间可能会发生碰撞,影响推煤作业的进行。
3、为此,现有技术在推煤机上设置超声波雷达,通过超声波雷达检测推煤机前进方向是否存在其他推煤机,当检测到前进方向出现障碍时,紧急停止推煤机的运行,避免发生碰撞,但是这样的防撞设计使得推煤机在遇到障碍时无法再继续后续的推煤机作业,导致推煤作业无法在预定时间内完成。
技术实现思路
1、为此,本发明提供一种推煤机及其在气膜煤场中的路径导航方法,有效的解决了现有技术中的推煤机在遇到障碍时无法再继续后续的推煤机作业导致推煤作业无法在预定时间内完成的问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:
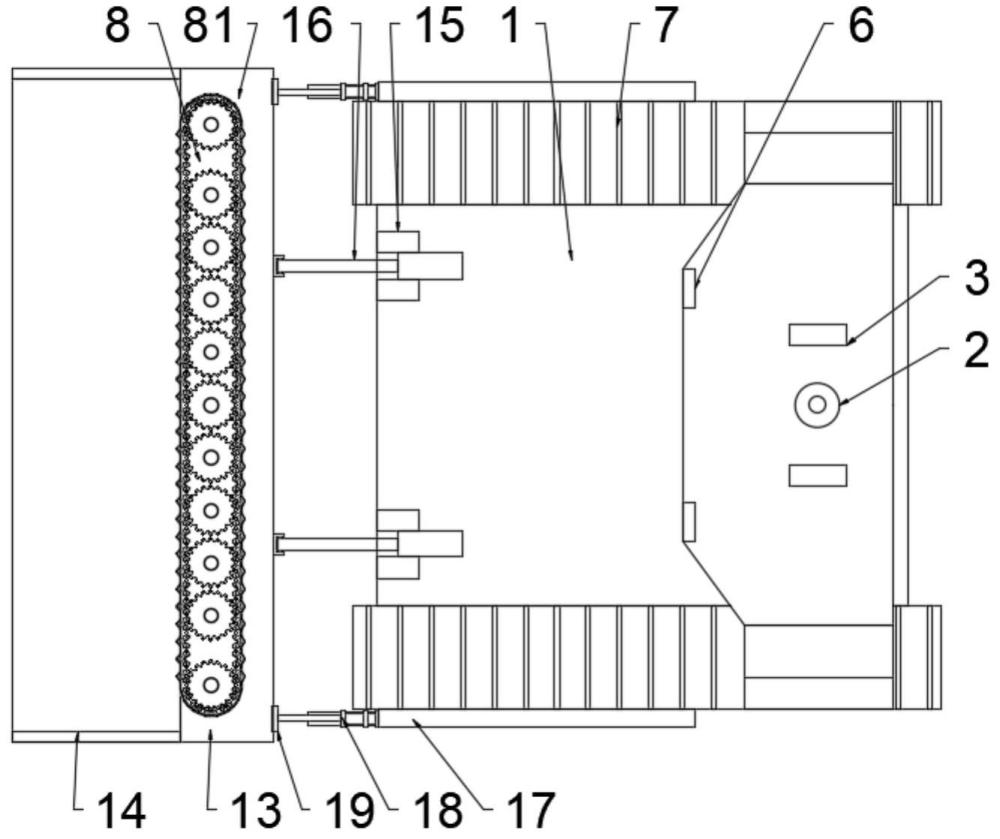
3、一种推煤机,包括推煤机主体、履带传动装置和传料结构;
4、其中,所述履带传动装置安装在所述推煤机主体的两侧;
5、所述履带传动装置包括贯穿设置在所述推煤机主体底部的传动轴、设置在所述传动轴上的主动轮、设置在所述主动轮上的传动履带以及设置在传动履带内的被动轮;
6、所述传动履带内侧与所述主动轮、所述被动轮啮合,所述被动轮上设置有连接轴,所述被动轮转动设置在所述连接轴上,所述连接轴固定设置在所述推煤机主体的底部侧壁,所述传动轴的端部均连接有驱动电机。
7、进一步地,所述推煤机主体底部侧壁连接有履带支撑架,所述履带支撑架上等间距设置有多个分支架,所述分支架上对称安装有若干个支撑板,所述支撑板上安装有支撑轮;
8、所述支撑轮与所述传动履带内侧啮合。
9、进一步地,所述推煤机主体前端设置有推煤板,所述推煤板侧边设置有推煤侧板,所述推煤机主体上设置有安装座,所述安装座上固定设置有伸缩柱,所述推煤板的靠近所述推煤机主体一侧端面转动安装在所述伸缩柱的端部;
10、所述履带支撑架侧边设置有安装架,所述安装架侧边安装有驱动气缸,所述驱动气缸输出端连接有驱动块,所述推煤板的靠近所述推煤机主体一侧端面开设有滑槽,所述驱动块滑动设置在所述滑槽内。
11、进一步地,所述传料结构包括设置在所述推煤板内的传动腔、设置在所述传动腔内的传动链轮、设置在所述传动链轮上的活动齿形链、设置在所述活动齿形链内的支撑链轮;
12、所述支撑链轮设置为若干个,所述推煤板远离所述推煤机主体一侧端部开设有开槽,所述活动齿形链朝外一侧至少部分延伸至所述开槽内,所述传动链轮上连接有传动电机。
13、进一步地,所述活动齿形链由若干齿形板、连接板和连接轴组成;
14、所述齿形板与所述传动链轮、所述支撑链轮啮合,相邻所述齿形板与所述连接板连接,且所述连接板和所述齿轮板通过所述连接轴转动连接,每个所述齿形板上均安装有安装推板,运动至所述开槽的所述安装推板与所述推煤板内侧平齐。
15、进一步地,所述安装推板端部转动连接有第一凸板,相邻所述安装推板上连接有第二凸板,所述第一凸板和所述第二凸板相互靠近的端部转动连接;
16、运动至所述开槽的所述第一凸板和所述第二凸板转动连接处延伸至所述安装推板外端面,运动至所述传动链轮的所述第一凸板和所述第二凸板的转动连接处不超出相邻所述安装推板外表面连接线的位置。
17、进一步地,所述推煤机主体根据安全备选路径,选择变道方向,根据变道方向其中一驱动电机通过主动轮带动传动履带向前运行,另一驱动电机通过主动轮带动传动履带向后运行,同时驱动传动电机带动安装推板以与转动方向一致的方向移动以带动煤块以同一方向活动,带动推煤机主体转动90°后前移,后改变驱动电机驱动方向,反向转动90°,并带动煤块以同样方向活动,以完成变道。
18、为解决上述技术问题,本发明还进一步提供下述技术方案:
19、一种推煤机在气膜煤场中的路径导航方法,包括以下步骤:
20、步骤100,在气膜煤场内定点设置uwb定位基站,安装在推煤机主体上的uwb定位标签以uwb脉冲持续向uwb定位基站发送数据帧;
21、步骤200,uwb定位基站利用短脉冲侦测器测量uwb定位标签的数据帧到达接收器天线的时间,确定uwb定位标签达到不同uwb定位基站之间的时间差,并计算uwb定位标签位置;
22、步骤300,将推煤机主体的位置数据通过无线网络传输到控制系统,结合激光模组检测装置测量数据建立的模型数据库,通过数据分析和运算,得到推煤作业的第一最佳路径和第二备选路径,其中,第二备选路径位于第一最佳路径的两侧边且与其始终平行;
23、步骤400,控制系统发送第一最佳路径的作业指令,uwb定位基站定位推煤机主体按规划好的第一最佳路径进行作业;
24、步骤500,安装在推煤机主体上的超声波雷达在推煤作业中打开,当超声波雷达检测到推煤机主体前方出现障碍时,发送第二备选路径的作业指令;
25、步骤600,预设推煤机主体周围定长范围内为安全变道区域,获取位于第二备选路径上的推煤机主体的位置并判断是否在变道安全区域内,根据判断结果标记安全备选路径;
26、步骤700,uwb定位基站定位推煤机主体按照安全备选路径选择变道方向驱动履带传动装置进行变道并驱动传料结构带动煤块沿变道方向移动、变道后继续进行作业。
27、进一步地,所述uwb定位基站安装在气膜煤场内顶部边角处位置,所述uwb定位基站至少设置九个;
28、所述激光模组检测装置、所述uwb定位标签、所述超声波雷达均安装在推煤机主体上,所述uwb定位基站与所述控制系统有线连接,所述激光模组检测装置、所述超声波雷达与所述控制系统无线连接,所述uwb定位标签与uwb定位基站无线连接。
29、进一步地,所述预设推煤机主体周围定长范围内为安全变道区域,获取位于第二备选路径上的推煤机主体的位置并判断是否在变道安全区域内,根据判断结果标记安全备选路径,包括:
30、将推煤机主体周围a米范围设置为安全变道区域;
31、获取正在运行的且位于第二备选路径上的推煤机主体的位置数据,判断是否在变道安全区域内;
32、若存在推煤机主体位于其中一第二备选路径上且在变道安全区域内,将另一第二备选路径标记为安全备选路径;
33、若存在推煤机主体位于两个第二备选路径上且在变道安全区域内,则制动存在冲突的推煤机主体,等待推煤机主体驶离变道安全区域再进行变道作业。
34、本发明与现有技术相比较具有如下有益效果:
35、本发明中,根据推煤机主体数据分析和运算得到推煤作业的第一最佳路径和第二备选路径,当在第一最佳路径中超声波雷达检测到推煤机主体前方出现障碍时,发送第二备选路径的作业指令,并且检查第二备选路径上其他推煤机主体是否在当前推煤机主体的变道安全区域内,将其上不存在推煤机主体或者推煤机主体不在变道安全区域的第二备选路径标记为安全备选路径,使得推煤机主体在安全备选路径上继续推煤作业且不会与其他推煤机主体发生撞击。
- 还没有人留言评论。精彩留言会获得点赞!