旋转机械故障源识别方法、装置、电子设备和存储介质与流程
本技术涉及设备故障识别,尤其涉及一种旋转机械故障源识别方法、装置、电子设备和存储介质。
背景技术:
1、振动是影响旋转机械安全稳定运行的关键因素,振动过大会产生大幅动应力,导致设备部件的疲劳损坏。振动故障源的准确识别对于旋转机械故障诊断非常重要,直接关系到故障治理效果和故障治理工作的成败。
2、相关技术中,在旋转机械发生故障的情况下,通常采用传递路径分析方式对旋转机械进行分析,以得到造成旋转机械故障的部件。其中,传递路径分析方式对旋转机械进行分析的一般过程为:根据旋转机械结构特点,建立传递路径分析模型,传递路径两端分别设为主动源和被动源。在主动源和被动源上布置振动测点,在不同工况下开展试验,获取不同工况下主动源和被动源振动数据,采用奇异值分解等方法,求解出不同工况下主动源到激励源之间各传递路线的敏感度,并计算出各主动源对被动源振动的贡献度,进而找出振动源头和各路径敏感度。传递路径分析方法将旋转机械看作为由“系统输入—传递路径—系统输出”组成的简单分析模型,需要对旋转机械的动力系统进行隔离移除后再进行测试。对大量的旋转机械而言,移除动力系统比较困难,工作量很大,限制了该方法的应用,并且这种方法需要大量不同工况下的试验数据,要求工况之间必须不相关,对于很多旋转机械而言,难度也较大。因此,如何以便捷的方式来对旋转机械进行故障源识别是目前亟需解决的技术问题。
技术实现思路
1、本技术提出一种旋转机械故障源识别方法、装置、电子设备和存储介质。
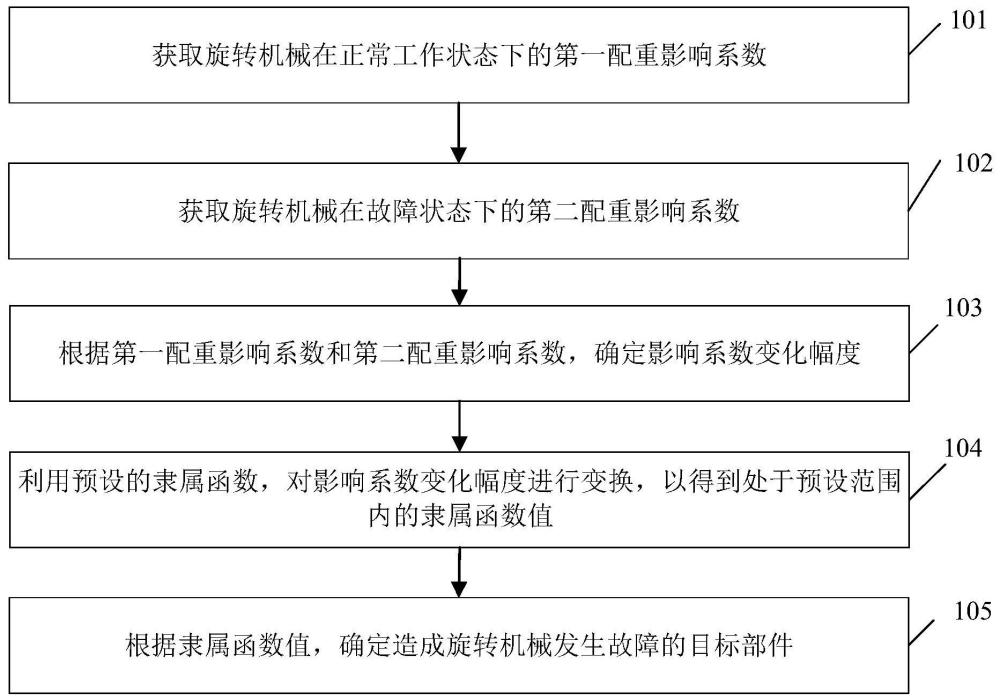
2、本技术第一方面实施例提出了一种旋转机械故障源识别方法,所述方法包括:获取旋转机械在正常工作状态下的第一配重影响系数;获取所述旋转机械在故障状态下的第二配重影响系数;根据所述第一配重影响系数和所述第二配重影响系数,确定影响系数变化幅度;利用预设的隶属函数,对所述影响系数变化幅度进行变换,以得到处于预设范围内的隶属函数值;根据所述隶属函数值,确定造成所述旋转机械发生故障的目标部件。
3、在本技术的一个实施例中,所述获取旋转机械在正常工作状态下的第一配重影响系数,包括:在未给所述旋转机械配重,并且所述旋转机械处于正常工作状态的情况下,获取所述旋转机械的转速达到待分析转速时,所述旋转机械的第一振动矢量;在给所述旋转机械配重,并且所述旋转机械处于正常工作状态的情况下,获取所述旋转机械的转速达到所述待分析转速时,所述旋转机械的第二振动矢量,其中,为所述旋转机械配重是指在所述旋转机械的转动部件中的转盘的指定角度处上安装指定配重块;根据所述第一振动矢量、所述第二振动矢量、所述指定配重块和所述指定角度,确定所述旋转机械在正常工作状态下的第一配重影响系数。
4、在本技术的一个实施例中,所述根据所述第一振动矢量、所述第二振动矢量、所述指定配重块和所述指定角度,确定所述旋转机械在正常工作状态下的第一配重影响系数,包括:将所述指定配重块的重量和安装半径进行相乘,以得到配重数值;根据所述指定角度和所述目标数值形成配重矢量;获取所述第二振动矢量和所述第一振动矢量的第一矢量差;根据所述第一矢量差与所述配重矢量的比值,以得到所述旋转机械在正常工作状态下的第一配重影响系数。
5、在本技术的一个实施例中,所述获取所述旋转机械在故障状态下的第二配重影响系数,包括:在未给所述旋转机械配重,并且所述旋转机械处于故障状态的情况下,获取所述旋转机械的转速达到待分析转速时,所述旋转机械的第三振动矢量;在给所述旋转机械配重,并且所述旋转机械处于故障状态的情况下,获取所述旋转机械的转速达到所述待分析转速时,所述旋转机械的第四振动矢量;根据所述第三振动矢量、所述第四振动矢量、所述指定配重块和所述指定角度,确定所述旋转机械在故障状态下的第二配重影响系数。
6、在本技术的一个实施例中,所述根据所述第三振动矢量、所述第四振动矢量、所述指定配重块和所述指定角度,确定所述旋转机械在故障状态下的第二配重影响系数,包括:将所述指定配重块的重量和安装半径进行相乘,以得到配重数值;根据所述指定角度和所述目标数值形成配重矢量;获取所述第四振动矢量和所述第三振动矢量的第二矢量差;根据所述第二矢量差与所述配重矢量的比值,以得到所述旋转机械在故障状态下的第二配重影响系数。
7、在本技术的一个实施例中,所述根据所述隶属函数值,确定造成所述旋转机械发生故障的目标部件,包括:在所述隶属函数值小于或者等于预设阈值的情况下,确定造成所述旋转机械发生故障的目标部件为所述旋转机械的转动部件;在所述隶属函数值大于预设阈值的情况下,确定造成所述旋转机械发生故障的目标部件为所述旋转机械的支撑部件。
8、本技术第二方面实施例提出了一种旋转机械故障源识别装置,该装置包括:第一获取模块,用于获取旋转机械在正常工作状态下的第一配重影响系数;第二获取模块,用于获取所述旋转机械在故障状态下的第二配重影响系数;第一确定模块,用于根据所述第一配重影响系数和所述第二配重影响系数,确定影响系数变化幅度;变换模块,用于利用预设的隶属函数,对所述影响系数变化幅度进行变换,以得到处于预设范围内的隶属函数值;第二确定模块,用于根据所述隶属函数值,确定造成所述旋转机械发生故障的目标部件。
9、在本技术的一个实施例中,所述第一获取模块,具体用于:在未给所述旋转机械配重,并且所述旋转机械处于正常工作状态的情况下,获取所述旋转机械的转速达到待分析转速时,所述旋转机械的第一振动矢量;在给所述旋转机械配重,并且所述旋转机械处于正常工作状态的情况下,获取所述旋转机械的转速达到所述待分析转速时,所述旋转机械的第二振动矢量,其中,为所述旋转机械配重是指在所述旋转机械的转动部件中的转盘的指定角度处上安装指定配重块;根据所述第一振动矢量、所述第二振动矢量、所述指定配重块和所述指定角度,确定所述旋转机械在正常工作状态下的第一配重影响系数。
10、在本技术的一个实施例中,所述第二获取模块,具体用于:在未给所述旋转机械配重,并且所述旋转机械处于故障状态的情况下,获取所述旋转机械的转速达到待分析转速时,所述旋转机械的第三振动矢量;在给所述旋转机械配重,并且所述旋转机械处于故障状态的情况下,获取所述旋转机械的转速达到所述待分析转速时,所述旋转机械的第四振动矢量;根据所述第三振动矢量、所述第四振动矢量、所述指定配重块和所述指定角度,确定所述旋转机械在故障状态下的第二配重影响系数。
11、在本技术的一个实施例中,所述第二确定模块,具体用于:在所述隶属函数值小于或者等于预设阈值的情况下,确定造成所述旋转机械发生故障的目标部件为所述旋转机械的转动部件;在所述隶属函数值大于预设阈值的情况下,确定造成所述旋转机械发生故障的目标部件为所述旋转机械的支撑部件。
12、本技术第三方面实施例提出了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,当所述处理器执行所述程序时实现本技术实施例中的旋转机械故障源识别方法。
13、本技术第四方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,当该程序被处理器执行时本技术实施例中的旋转机械故障源识别方法。
14、本技术的实施例提供的技术方案至少带来以下有益效果:
15、结合旋转机械在正常工作状态下的第一配重影响系数和故障状态下的第二配重影响系数,来确定旋转机械在故障前后的影响系数变化幅度,并利用预设的隶属函数,对影响系数变化幅度进行变换,以得到处于预设范围内的隶属函数值,以及根据隶属函数值,确定造成旋转机械发生故障的目标部件。由此,基于旋转机械在故障前后配重影响系数的影响系数变化幅度,便捷地确定了造成旋转机械故障的目标部件,提高了确定造成旋转机械故障的部件的便捷性。
16、上述可选方式所具有的其他效果将在下文中结合具体实施例加以说明。
- 还没有人留言评论。精彩留言会获得点赞!