一种用于快速准确测定植被覆盖度的系统装置及使用方法与流程
本技术涉及植被覆盖度测定,更具体地说,涉及一种用于快速准确测定植被覆盖度的系统装置及使用方法。
背景技术:
1、植被覆盖度是指某一区域内植被所覆盖地表面积与该区域总面积的比例;植被覆盖度的测定是环境监测和生态研究中的重要内容,它可以用于评估生态系统的健康状况、研究植被变化趋势等;快速准确测定植被覆盖度的系统装置对于生态环境保护和资源管理具有重要意义。
2、相关技术中,可采用目测法、针刺法、植被盖度仪法三种方法;但以上三种方法存在缺陷主要是目测法因测算人员不同存在估算误差较大,针刺法较为准确,但相对耗费时间,植被盖度仪因拍照人员取得的照片质量、或天气原因造成测算误差很大,不稳定,导致野外测量时难以快速、精准的获取测定结果;为了更加快速、精准的获取测定结果,例如现有技术公开号为cn216791127u的文献提供一种激光式草地植被盖度快速测量装置,该装置通过将样方内植被投影面积测算问题转化为等密度的测点上激光接触与否的计数问题,利用激光垂直照射样方,对样方内10*10个测点的光斑与植物群落的接触情况进行记录,求和的百分数即能反映样方内草地植被的盖度。
3、上述中的现有技术方案虽然通过激光点与植被接触可以实现在野外不受天气影响,并且快速、准确的获取测定结果的效果,但是激光点在与植被接触时需要移动标尺外侧的对称设置的两个测臂移动,使得激光灯可对样方内的植被进行照射,进而在测定时需要移动测臂,使用不够方便,并且样方的大小受到标尺的限制,不便于根据测定需求调节样方的大小,因此存在不便于调节使用的缺陷
4、鉴于此,我们提出一种用于快速准确测定植被覆盖度的系统装置及使用方法。
技术实现思路
1、1.要解决的技术问题
2、本技术的目的在于提供一种用于快速准确测定植被覆盖度的系统装置及使用方法,解决了不便于调节使用的技术问题,实现了便于根据测定需求进行调节的技术效果。
3、2.技术方案
4、本技术提供了一种用于快速准确测定植被覆盖度的系统装置,包含:
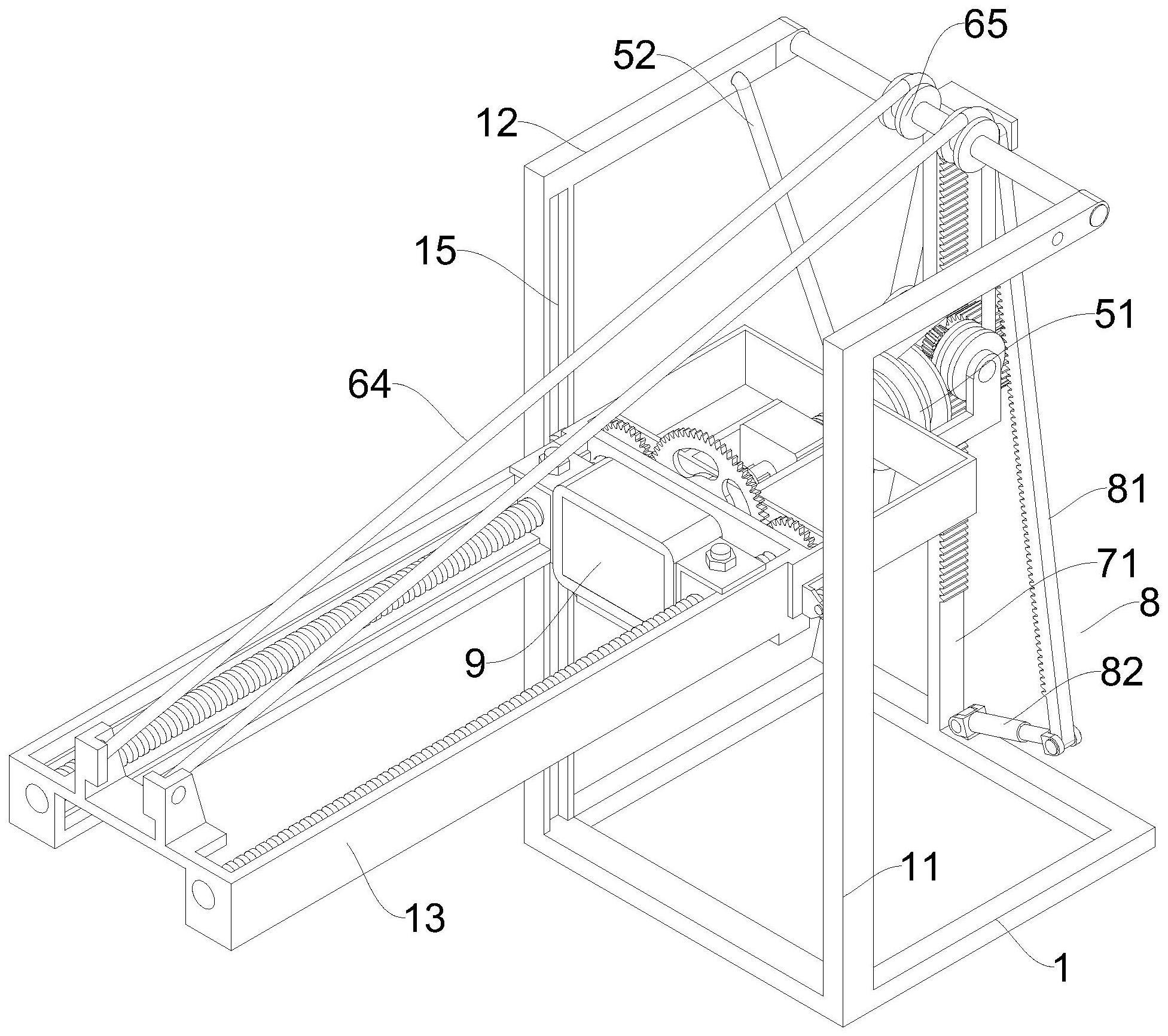
5、底框,所述底框顶部的一侧对称固定设置有立柱,对称设置的所述立柱之间滑动设置有支臂,所述支臂靠近所述底框的一侧固定设置有固定座;
6、用于驱动激光雷达平移的平移组件,所述平移组件设置于支臂的内侧,所述激光雷达位于支臂的内侧;
7、离合组件,所述离合组件设置于固定座的底部;
8、电机,所述电机固定设置于固定座的内部,所述电机的其中一个输出端通过离合组件与平移组件传动设置;
9、提升组件,所述提升组件通过离合组件与电机的另一输出端传动设置,所述提升组件在所述电机的驱动下带动所述支臂升降;
10、用于对所述支臂加固的加固组件,所述加固组件在所述提升组件的驱动下运行,所述加固组件跟随所述支臂升降;
11、爬升组件,所述爬升组件在所述加固组件驱动下驱动所述支臂升降,所述爬升组件跟随所述支臂升降;
12、锁紧组件,所述锁紧组件设置于底框的顶部,用于对所述爬升组件锁紧。
13、通过采用上述技术方案,在进行植被盖度测定时,通过激光雷达向地面发射扇形激光束,并且在电机的驱动下使平移组件带动激光雷达平移,移动过程中使激光雷达扫描测定区域,将激光束反射回来的信号转化为数字信号,利用数据处理软件对激光雷达采集的三维点云数据进行处理,得出植被高度信息和地表高度信息,并计算出植被覆盖度,当调节样方的面积时,通过离合组件断开电机与平移组件之间的传动,此时离合组件带动电机的另一侧输出端与提升组件传动配合,使电机驱动提升组件带动支臂沿着立柱上下滑动,通过支臂带动激光雷达位于不同的高度上,使激光雷达发射的扇形激光束与地面的交界处宽度发生变化,进而对激光雷达的测定宽度进行调节,此时提升组件驱动加固组件运行,使加固组件对任意高度上的支臂进行加固,以保证稳定性,同时加固组件驱动爬升组件带动支臂爬升,在提升组件驱动的基础上保证了支臂升降的稳定性,调节后通过锁紧组件对爬升组件锁紧,使爬升组件带动加固组件和提升组件同时锁紧,以保证支臂位于固定的高度上,然后再通过离合组件断开电机与提升组件的传动,使电机的输出端与平移组件传动配合,以便于调节后直接运行平移组件带动激光雷达开始测定,使用更加方便。
14、作为本技术文件技术方案的一种可选方案,所述激光雷达底部的两侧平行于支臂对称固定设置有激光束发射器,所述激光束发射器发射方向与激光雷达最两侧的激光束相互平行,所述激光雷达与gps定位系统集成设置,所述激光雷达在所述平移组件的驱动下沿着所述支臂滑动。
15、通过采用上述技术方案,当激光雷达将激光束反射回来的信号转化为数字信号使,并通过gps定位系统记录测量位置和时间,以便于自动记录样方位置和测定时间,并且扫描过程中,通过激光雷达底部的激光束发射器向地面发射激光束,用于对激光雷达的程度宽度进行标记,防止其他物体在激光雷达的测定范围内运行测定结果。
16、作为本技术文件技术方案的一种可选方案,所述平移组件包括滑块,所述滑块固定设置于激光雷达的两侧,所述滑块均滑动设置于支臂的内侧,所述滑块内侧均螺纹设置有丝杆,所述丝杆均转动设置于支臂的内侧,所述丝杆靠近底框的一端均固定设置有齿轮a,所述齿轮a均啮合设置于齿轮b的外侧,所述齿轮b转动设置于固定座的外侧,所述齿轮b通过离合组件与电机的输出端传动配合。
17、通过采用上述技术方案,当离合组件将齿轮b与电机的输出端传动配合时,电机驱动齿轮b转动,使齿轮b同时带动外侧的两个齿轮a转动,齿轮a同时带动丝杆转动,使丝杆同时驱动外侧的滑块沿着支臂滑动,通过滑块带动激光雷达沿着支臂滑动,以便于激光雷达对样方内的植被进行扫描。
18、作为本技术文件技术方案的一种可选方案,所述离合组件包括电动推杆a,所述电动推杆a固定设置于固定座的底部,所述电动推杆a的输出端固定设置有连杆,所述连杆外侧对称固定设置有连接板,所述连接板内侧均转动设置有卡环a,所述卡环a均滑动设置于花轴的外侧,所述花轴固定设置于电机的两输出端,所述电动推杆a通过推动所述连杆带动卡环a与卡环b相互卡合,所述卡环b与齿轮b同轴固定设置,此时,所述连杆通过连接板带动另一个所述卡环a与卡环c脱离传动,所述卡环c转动时驱动提升组件运行。
19、通过采用上述技术方案,当电动推杆a通过推动连杆带动卡环a与卡环b卡合时,电机通过花轴带动卡环a转动,卡环a通过卡环b带动齿轮b转动,进而使电机通过离合组件驱动平移组件运行,此时,另一个卡环a在连接板的带动下与卡环c相互远离,使得电机可单独驱动平移组件带动激光雷达进行扫描工作,当对支臂的高度进行调节时,通过电动推杆a带动卡环a与卡环b相互远离,并且使另一个卡环a与卡环c传动配合,当电机运行时通过花轴带动卡环a转动,使卡环a通过卡环c驱动提升组件运行。
20、作为本技术文件技术方案的一种可选方案,所述提升组件包括收卷盘a,所述收卷盘a与卡环c同轴固定设置,所述收卷盘a转动设置于固定座的外侧,所述收卷盘a外侧绕设有两股吊绳a,两股所述吊绳a另一端分别与支架固定设置,所述支架固定设置于立柱的顶部,所述收卷盘a收卷所述吊绳a时带动所述支臂沿着所述立柱升降,所述支臂两侧均转动设置有滚轮,所述立柱内侧均对应所述滚轮开设有滑槽,所述收卷盘a转动时带动加固组件运行。
21、通过采用上述技术方案,当电机通过卡环a带动卡环c转动时,卡环c带动收卷盘a转动,收卷盘a转动时对外侧的吊绳a收卷,随着吊绳a的长度减小,使吊绳a拉动支臂带动固定座沿着立柱上升,反之下降,以便于对支臂的高度进行调节,并且在滚轮的作用降低支臂与立柱之间的滑动阻力,以保证支臂稳定性升降。
22、作为本技术文件技术方案的一种可选方案,所述加固组件包括蜗杆,所述蜗杆与收卷盘a同轴固定设置,所述蜗杆顶部啮合设置有蜗轮,所述蜗轮两端均固定s设置有收卷盘b,所述收卷盘b外侧均绕设有吊绳b,所述吊绳b另一端均固定设置于支臂远离底框的一端,所述吊绳b绕设于滑轮的外侧,所述滑轮转动设置于支架的外侧,所述蜗杆转动时带动爬升组件运行。
23、通过采用上述技术方案,当收卷盘a转动时通过蜗杆带动蜗轮转动,使蜗轮带动收卷盘b转动,收卷盘b转动时对吊绳b收卷,使吊绳b随着支臂的升降进行收放,使得支臂停止升降时,吊绳b对支臂远离底框的一端进行加固,以保证支臂端部的稳定性。
24、作为本技术文件技术方案的一种可选方案,所述爬升组件包括齿轮c,所述齿轮c与蜗杆同轴固定设置,所述齿轮c外侧啮合设置有竖直齿板,所述竖直齿板固定设置于底框的顶部,所述齿轮c转动后通过锁紧组件锁紧。
25、通过采用上述技术方案,当提升组件带动支臂升降时,提升组件通过蜗杆带动齿轮c转动,使齿轮c沿着竖直齿板的外侧爬升,进而提高了支臂升降的稳定性,并且在支臂调节后,通过锁紧组件对齿轮c锁紧,使齿轮c、蜗杆和收卷盘a均无法转动,保证了支臂调节后的稳定性。
26、作为本技术文件技术方案的一种可选方案,所述锁紧组件包括转动齿板,所述转动齿板顶部转动设置于竖直齿板的顶部,所述转动齿板底部转动设置有电动推杆b,所述电动推杆b另一端转动设置于底框的端部,所述转动齿板卡合设置于齿轮c的外侧。
27、通过采用上述技术方案,当齿轮c在竖直齿板的外侧爬升时,电动推杆b推动转动齿板远离齿轮c的外侧,当齿轮c在任意位置停止时,电动推杆b带动转动齿板向齿轮c的外侧靠近,使齿轮c夹持在转动齿板和竖直齿板之间,进而防止齿轮c自行转动,使支臂可稳定性停留在一定高度上。
28、本技术提供了上述用于快速准确测定植被覆盖度的系统装置的使用方法,包括以下步骤:
29、s1、通过离合组件将电机的其中一个输出端与提升组件传动配合,启动固定座内侧的电机运行,使电机驱动提升组件带动支臂沿着立柱上下滑动,通过支臂带动激光雷达位于不同的高度上,使激光雷达发射的扇形激光束与地面的交界处宽度发生变化,进而对激光雷达的测定宽度进行调节;
30、s2、此时,提升组件驱动加固组件运行,使加固组件对任意高度上的支臂进行加固,以保证稳定性;
31、s3、同时,加固组件驱动爬升组件带动支臂爬升,在提升组件驱动的基础上保证了支臂升降的稳定性;
32、s4、调节后通过锁紧组件对爬升组件锁紧,使爬升组件带动加固组件和提升组件同时锁紧,以保证支臂位于固定的高度上,然后再通过离合组件断开电机与提升组件的传动,使电机的输出端与平移组件传动配合;
33、s5、在电机的驱动下使平移组件带动激光雷达平移,移动过程中使激光雷达扫描测定区域,将激光束反射回来的信号转化为数字信号,利用数据处理软件对激光雷达采集的三维点云数据进行处理,得出植被高度信息和地表高度信息,并计算出植被覆盖度。
34、3.有益效果
35、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
36、(1)本技术由于采用了电机驱动提升组件带动支臂内侧的激光雷达升降,改变激光雷达发射的扇形激光对地面的照射面积,所以有效解决了不便于调节使用的问题,进而实现了便于根据测定需求对样方的面积进行调节,以便于调节使用。
37、(2)本技术通过在支臂之间设置激光雷达,利用激光雷达发射的扇形激光束对植被进行测定,以防止天气原因导致测定结果不够准确,更加适应于野外植被测定工作。
38、(3)本技术通过在支臂的内侧设置用于驱动激光雷达平移的平移组件,平移组件在电机的驱动下带动激光雷达平移,平移的过程中对植被进行扫描,使激光雷达测定时的扫描工作更加方便。
39、(4)本技术通过在平移组件、电机和电机、提升组件之间设置离合组件,在调节时通过离合组件将电机和提升组件传动配合,使电机驱动提升组件运行带动支臂升降,同时提升组件带动加固组件运行,以保证加固组件可对任意高度上的支臂进行加固,调节后通过离合组件断开电机与提升组件的传动,以便于电机单独驱动平移组件运行。
40、(5)本技术通过在提升组件和爬升组件之间设置加固组件,当提升组件运行时通过加固组件驱动爬升组件运行,使爬升组件配合提升组件同步带动支臂升降,提高了支臂调节时的稳定性,并且调节后通过锁紧组件对爬升组件锁紧,可同时对提升组件和加固组件锁紧,保证了支臂调节后的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!