一种基于激光散斑成像的二维多点微振动测量系统及方法
本发明涉及激光散斑测振,尤其涉及一种基于激光散斑成像的二维多点微振动测量系统及方法。
背景技术:
1、激光散斑微振动测量是一种新兴的微振动测量方法,具有系统简单、操作容易、与被测对象非接触、测量距离远等优点,因此引起了广大研究人员的兴趣。
2、卷帘快门是指cmos图像传感器中,每帧图像从上到下、逐行曝光和读出的快门方案。当拍摄对象运动时,会造成成像模糊,称为“果冻”效应。因此,以前的研究,主要集中在通过图像处理解决、减小或者消除图像失真。同时也有研究人员,利用逐行曝光的机理,通过对比相邻行图像的变化,将有效采样频率提高到每秒帧数与每帧行数的乘积的量级,提取运动信息。
3、2014年,美国麻省理工学院的研究人员,采用复数金字塔的图像处理算法,从卷帘快门相机记录的图像中提取出了振动信息。该方案首先通过复数可控金字塔将视频在不同方向和尺度上进行分解,并计算每个像素点、方向和尺度上的局部运动信号。然后,通过一系列的平均和对齐操作组合,将局部运动信号合成为一个全局运动信号。最后,使用语音增强算法对全局运动信号进行降噪,得到复原后的声音。实验结果表明,该方法能从60帧/秒的卷帘快门相机所拍摄的视频中提取1000hz以下且具有较高可懂度的音频信号。2016年,渥太华大学的zhou提出shearlet变换算法,从卷帘快门相机采集的图像中提取振动信息。与复数可控金字塔相比,shearlet变换算法对于振动信号的提取更加准确,能够有效降低运动估计的噪声。实验表明,使用该算法能从120帧/秒的视频中成功地提取75hz到325hz的单频信号,并且还原了一段音频信号。不过,当被探测物体的振动频率高于500hz时,使用该方法所提取信号的信噪比较低。此外,由于该算法使用的是相位匹配而不是相位域减法,因此该方法对于图像的处理时间会比较长,且匹配算法会受到振动物体表面纹理的影响。2018年,河北工业大学的李铁军团队利用卷帘快门相机采集塑料尺子和空气压缩机的视频,结合图像匹配和边缘提取的方法,以14帧/秒的帧率成功提取了振动频率约为16hz的塑料尺悬臂梁的振动信号;以同样的帧速,提取出了空气压缩机低于150hz的振动模态信号,证明了该方案对于复杂振动信号提取的可行性。该信号提取算法要求相机卷帘方向与物体振动方向平行,仅适用于测量一维振动信号的频率。2022年,美国卡耐基梅隆大学的研究人员提出了卷帘快门结合全局快门相机的方案,通过采集散斑图像,实现了多点振动的同时探测,最高探测频率达到了5khz,但该方案结构复杂。2023年,厦门大学的王晓忠等人提出了激光散斑卷帘相机成像的方案,获得了卷帘相机行曝光时间间隔硬件限制的较高探测频率。
4、针对大面积多方位的测量需求,传统的解决方法或者采用空间顺序扫描,或者采用多传感器同时探测。前者时间上不能同时,后者需要采用多个传感器,浪费资源。在已经公开的发明专利申请(cn202210074317.4)的基础上,本发明提出了基于激光散斑成像的二维多点微振动测量系统及方法,实现空间多点振动信息的同步探测和提取。
技术实现思路
1、本发明的目的在于提供一种基于激光散斑成像的二维多点微振动测量系统及方法,该基于激光散斑成像的二维多点微振动测量系统具有结构简单、容易部署的优点,该基于激光散斑成像的二维多点微振动测量方法,依据相机大面积采集图像的特点实现二维多点微振动的探测,可有效提高探测面积和探测效率,可用于大面积搜索和识别振动目标。
2、为实现上述目的,本发明采用以下技术方案:
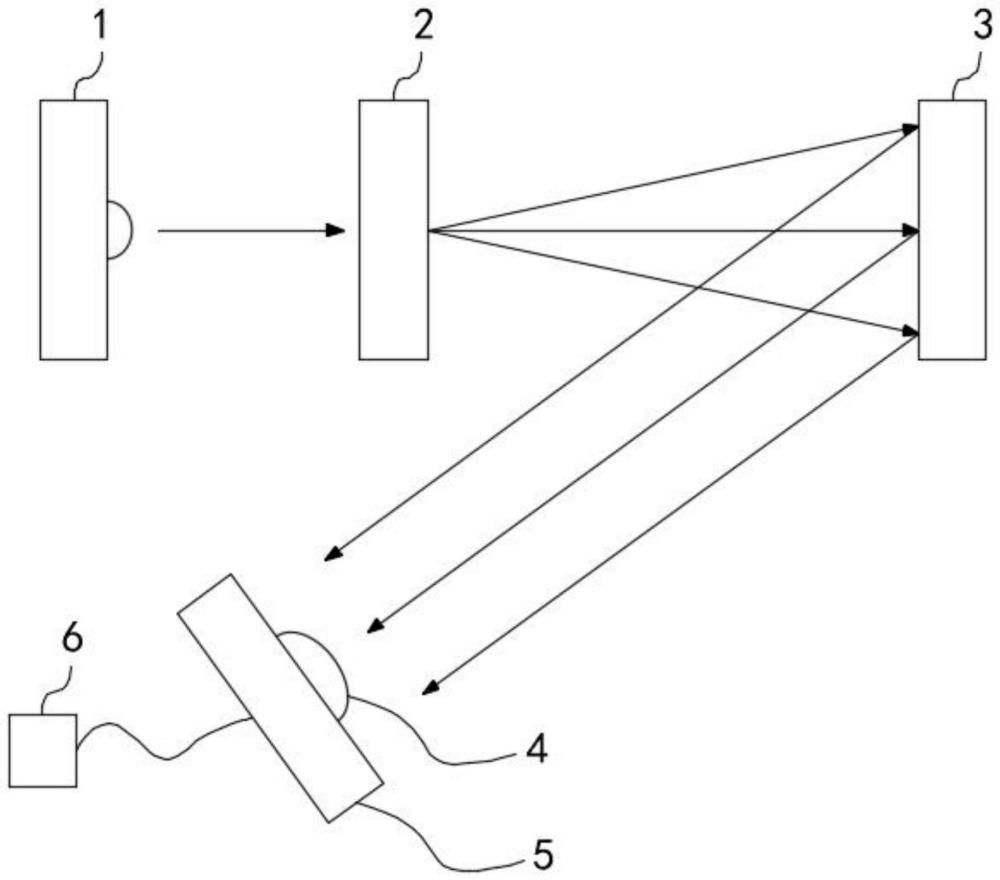
3、一种基于激光散斑成像的二维多点微振动测量系统,包括激光光源、空间光点阵产生装置、成像镜头、光探测器和微型计算机;所述激光光源与空间光点阵产生装置连接,用于将激光光源输出的激光经空间光点阵产生装置后产生二维光点阵;所述成像镜头与光探测器连接,被探测物体位于空间光点阵产生装置与成像镜头之间,二维光点阵的光信号传输至被探测物体表面后产生空间散斑并通过成像镜头对空间散斑成像;所述光探测器与微型计算机连接,通过微型计算机接收并处理光探测器从成像镜头上所采集的空间散斑图像。
4、优选地,所述空间光点阵产生装置产生的二维光点阵输出二维点阵空间光到被探测物体上。
5、优选地,所述光探测器采用卷帘快门式cmos图像传感器或全局快门式cmos图像传感器。
6、优选地,所述激光光源、空间光点阵产生装置和被探测物体位于同一轴线上,被探测物体、成像镜头和光探测器位于另一轴线上。
7、一种基于激光散斑成像的二维多点微振动测量方法,该方法利用所述的一种基于激光散斑成像的二维多点微振动测量系统实现,包括以下步骤:
8、s1、调整空间光点阵产生装置与光探测器的参数、位置,二维光点阵的光信号传输至被探测物体表面后散射产生空间散斑,空间散斑经成像镜头后,同时在光探测器上成像,记录各个散斑点阵在被探测物体表面的位置;
9、s2、调节成像镜头的参数,使得散斑离焦成像,光探测器将采集到的散斑图样输入到微型计算机中,并在微型计算机中进行信号处理;
10、s3、微型计算机通过优化算法将记录的散斑阵列进行分割,根据每个散斑图样变化,计算得出被探测物体相应位置的微小位移信息;
11、s4、根据被探测物体的微小位移信息,计算得出被探测物体的微振动信息。
12、优选地,步骤s3中所述优化算法采用连通域结合质心阵列配准,具体过程为:
13、s31a、采用连通域法计算一帧中每个散斑的连通行数;
14、s32a、将具有散斑连通的相邻行,保留到新的图像帧中;
15、s33a、在新的图像帧中,计算每行中每个散斑的质心,由每行中的散斑质心组成散斑质心阵列;
16、s34a、通过相邻行散斑质心阵列的配准,计算得到相邻行散斑质心的水平位移,作为相邻行之间的位移。
17、优选地,步骤s3中所述优化算法采用归一化相关系数法,具体过程为:
18、s31 b、对于卷帘快门式cmos图像传感器采集到的图像,相邻行之间进行交叉相关运算,根据相关峰的位置,求出相邻行之间的像素级别的位移;
19、s32b、采用插值算法,计算出相邻行之间亚像素级别的位移;
20、s33b、对于全局快门式cmos图像传感器采集到的图像,相邻帧之间进行二维交叉相关运算,根据相关峰的位置,求出相邻帧之间的像素级别的位移;
21、s34b、采用插值算法,计算出相邻帧之间亚像素级别的位移。
22、优选地,一种基于激光散斑成像的二维多点微振动测量方法,还包括步骤s5,所述步骤s5具体为:根据步骤s4中得到的微振动信息计算信噪比,若信噪比低于预先设定的阈值时,重复步骤s1至步骤s4,直至信噪比不低于预先设定的阈值。
23、采用上述技术方案后,本发明与背景技术相比,具有如下优点:
24、本发明采用线阵或者面阵相机记录二维空间点阵散斑信息,从中同时提取出多个目标的振动信息。当采用卷帘快门式cmos图像传感器作为光探测器记录被探测目标调制的二维点阵激光散斑时,可以从单帧散斑图像中提取目标的振动信息,可有效提高探测面积和探测效率,用于大面积搜索和识别振动目标。
- 还没有人留言评论。精彩留言会获得点赞!