基于格兰杰因果检验的图神经网络轴承故障诊断方法
本文属于轴承,具体涉及一种基于格兰杰因果检验的图神经网络轴承故障诊断方法。
背景技术:
1、滚动轴承在旋转机械中是必不可少的,由于轴承经常在重负荷或恶劣环境下工作,因此滚动轴承通常比其他机器部件更容易发生故障。现有的故障诊断方法有基于信号处理、基于机器学习的方法以及基于深度学习等,但是这些方法都具有一定的局限性。因此,轴承的长期可靠性和实时健康状况显著影响机器的性能和工作安全。
2、现实的工况收集到的时间序列大多数都是非平稳的,基本的模型很难进行高精度的故障诊断。一部分使用深度学习模型进行预测提高了精度,但是不具有可解释性,鲁棒性弱。如何能够对长时间非平稳时间序列的高精度诊断仍是有待解决难题。
技术实现思路
1、针对现有技术的上述问题,本文的目的在于,提供一种基于格兰杰因果检验的图神经网络轴承故障诊断方法,提高了在长时间非平稳时间序列中轴承故障的诊断精度。
2、为了解决上述技术问题,本文的具体技术方案如下:
3、一方面,本文提供一种基于格兰杰因果检验的图神经网络轴承故障诊断方法,所述方法包括:
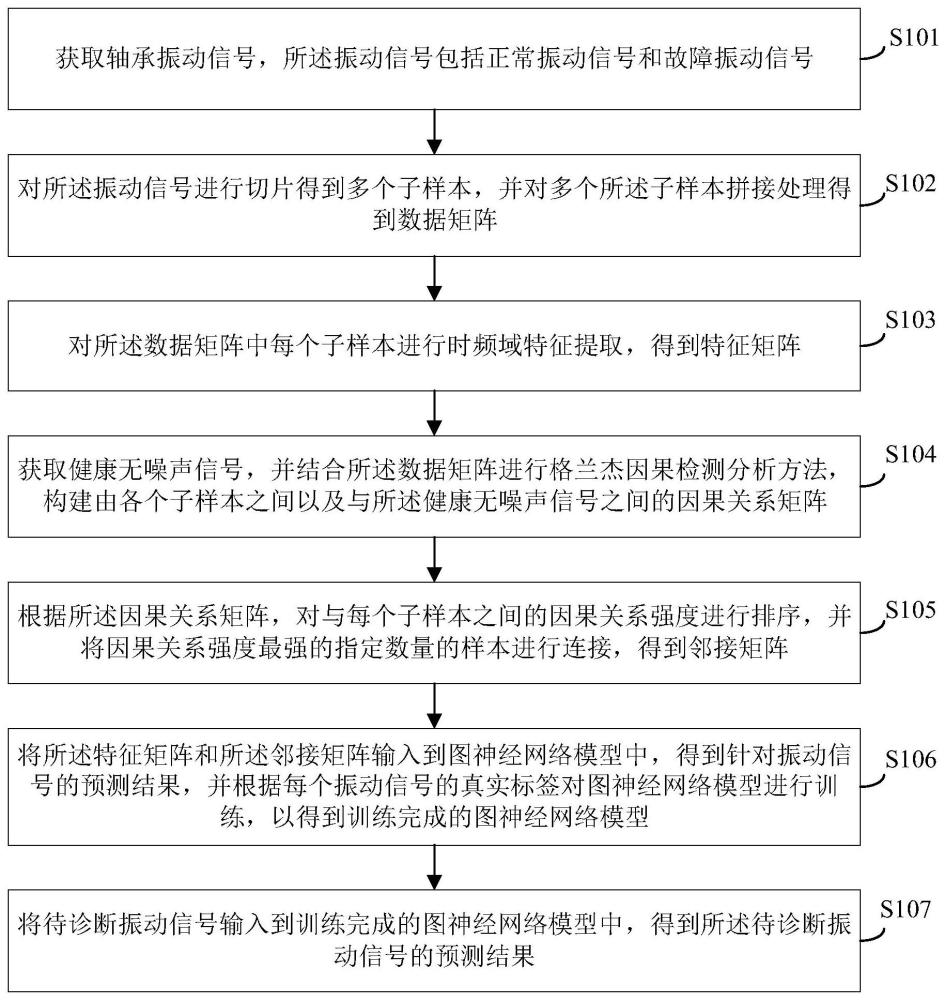
4、获取轴承振动信号,所述振动信号包括正常振动信号和故障振动信号;
5、对所述振动信号进行切片得到多个子样本,并对多个所述子样本拼接处理得到数据矩阵;
6、对所述数据矩阵中每个子样本进行时频域特征提取,得到特征矩阵;
7、获取健康无噪声信号,并结合所述数据矩阵进行格兰杰因果检测分析方法,构建由各个子样本之间以及与所述健康无噪声信号之间的因果关系矩阵;
8、根据所述因果关系矩阵,对与每个子样本之间的因果关系强度进行排序,并将因果关系强度最强的指定数量的样本进行连接,得到邻接矩阵;
9、将所述特征矩阵和所述邻接矩阵输入到图神经网络模型中,得到针对振动信号的预测结果,并根据每个振动信号的真实标签对图神经网络模型进行训练,以得到训练完成的图神经网络模型;
10、将待诊断振动信号输入到训练完成的图神经网络模型中,得到所述待诊断振动信号的预测结果。
11、进一步地,对所述振动信号进行切片得到多个子样本,并对多个所述子样本拼接处理得到数据矩阵,包括:
12、确定预设长度的移动窗口;
13、根据所述预设长度的移动窗口,对所述振动信号进行非重叠的切片处理,得到多个子样本;
14、将多个所述子样本进行横向拼接处理,得到数据矩阵。
15、进一步地,所述时频域特征包括:标准偏差、峰值、峭度、偏度、均方根、形状系数、波动因素、波峰因素和平方法。
16、进一步地,通过小波包分解法得到每个子样本的时频域特征,通过如下公式表示:
17、
18、其中,xi(n)为使用小波包分解法的第i频段的分解系数序列。
19、进一步地,通过经验模态分解法得到每个子样本的时频域特征,通过如下公式表示:
20、
21、其中,imfi(n)为eemd后的第i个数据序列,ni为使用经验模态分解法的分解层次。
22、进一步地,获取健康无噪声信号,并结合所述数据矩阵进行格兰杰因果检测分析方法,构建由各个子样本之间以及与所述健康无噪声信号之间的因果关系矩阵,包括:
23、确定基于时间序列的振动信号的滞后阶数;
24、根据所述滞后阶数、将所述数据矩阵中的子样本振动信号中的每个信号和所述健康无噪声信号,输入到自回归完整模型和自回归简化模型中,以确定自回归完整模型和自回归简化模型的预测误差;
25、当自回归完整模型的预测误差显著小于所述自回归简化模型的预测误差时,则表示该两个信号之间存在格兰杰原因;
26、将存在格兰杰原因的两个信号通过因果强度公式计算得到该两个信号之间的因果强度表示为:以得到所述数据矩阵和所述健康无噪声信号之间的因果强度集合g=[g1,g2,g3,...,gn];
27、将所述因果强度集合中的每两个元素差值得到因果关系矩阵,如下:
28、
29、进一步地,根据所述因果关系矩阵,对与每个子样本之间的因果关系强度进行排序,并将因果关系强度最强的指定数量的样本进行连接,得到邻接矩阵,包括:
30、确定所述因果关系矩阵中每行最大的前指定数量的元素,构成针对每个子样本的因果强度目标集合;
31、根据所述因果强度目标集合,通过权重方程计算因果强度权重,表示为:
32、
33、根据所述因果强度目标集合和实施因果强度权重,确定邻接矩阵,表示为:
34、
35、进一步地,所述图神经网络模型通过如下公式表示:z=f(x,a)=relu(relu(xaw(0)-b(0))aw(1)-b(1)),
36、其中,z表示为输入x经过图神经网络模型的前向传播过程后的输出,x为输入的特征矩阵,形状为(n,d),其中n是节点数量,d是每个节点的特征维度,a为邻接矩阵,形状为(n,n),表示节点之间的邻接关系,w∈rd×h是具有h个特征映射的隐藏层的输入到隐藏权重矩阵,b∈rh是输入到隐藏偏置矩阵。
37、进一步地,所述方法包括:
38、通过梯度下降法训练图神经网络模型中的权重w(0),w(1)和偏置b(0)。
39、另一方面,本文还提供一种机械设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述机械设备设有轴承,所述处理器执行所述计算机程序时实现如上述所述的方法。
40、采用上述技术方案,本文所述的一种基于格兰杰因果检验的图神经网络轴承故障诊断方法,所述方法包括:获取轴承振动信号,所述振动信号包括正常振动信号和故障振动信号;对所述振动信号进行切片得到多个子样本,并对多个所述子样本拼接处理得到数据矩阵;对所述数据矩阵中每个子样本进行时频域特征提取,得到特征矩阵;获取健康无噪声信号,并结合所述数据矩阵进行格兰杰因果检测分析方法,构建由各个子样本之间以及与所述健康无噪声信号之间的因果关系矩阵;根据所述因果关系矩阵,对与每个子样本之间的因果关系强度进行排序,并将因果关系强度最强的指定数量的样本进行连接,得到邻接矩阵;将所述特征矩阵和所述邻接矩阵输入到图神经网络模型中,得到针对振动信号的预测结果,并根据每个振动信号的真实标签对图神经网络模型进行训练,以得到训练完成的图神经网络模型;将待诊断振动信号输入到训练完成的图神经网络模型中,得到所述待诊断振动信号的预测结果,通过引入格兰杰因果检测算法来构建图神经网络的网络模型,通过因果强度的计算进而更好的捕捉到了信号中存在的数字特征,解决了因噪声问题对信号特征的干扰所导致的精度大幅度下降问题,实现了在不同噪声的工况环境下都保持这良好的轴承故障诊断能力。
41、为让本文的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种基于格兰杰因果检验的图神经网络轴承故障诊断方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,对所述振动信号进行切片得到多个子样本,并对多个所述子样本拼接处理得到数据矩阵,包括:
3.根据权利要求1所述的方法,其特征在于,所述时频域特征包括:标准偏差、峰值、峭度、偏度、均方根、形状系数、波动因素、波峰因素和平方法。
4.根据权利要求1所述的方法,其特征在于,通过小波包分解法得到每个子样本的时频域特征,通过如下公式表示:
5.根据权利要求1所述的方法,其特征在于,通过经验模态分解法得到每个子样本的时频域特征,通过如下公式表示:
6.根据权利要求1所述的方法,其特征在于,获取健康无噪声信号,并结合所述数据矩阵进行格兰杰因果检测分析方法,构建由各个子样本之间以及与所述健康无噪声信号之间的因果关系矩阵,包括:
7.根据权利要求1所述的方法,其特征在于,根据所述因果关系矩阵,对与每个子样本之间的因果关系强度进行排序,并将因果关系强度最强的指定数量的样本进行连接,得到邻接矩阵,包括:
8.根据权利要求1所述的方法,其特征在于,所述图神经网络模型通过如下公式表示:z=f(x,a)=relu(relu(xaw(0)-b(0))aw(1)-b(1)),
9.根据权利要求8所述的方法,其特征在于,所述方法包括:
10.一种机械设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述机械设备设有轴承,所述处理器执行所述计算机程序时实现如权利要求1至9任一项所述的方法。
技术总结
本文提供了一种基于格兰杰因果检验的图神经网络轴承故障诊断方法,方法包括:获取轴承振动信号;对振动信号进行切片拼接处理得到数据矩阵;对数据矩阵进行时频域特征提取,得到特征矩阵;获取健康无噪声信号,并结合数据矩阵进行格兰杰因果检测分析方法,构建由各个子样本之间以及与健康无噪声信号之间的因果关系矩阵;将因果关系强度最强的指定数量的样本进行连接,得到邻接矩阵;将特征矩阵和邻接矩阵对图神经网络模型进行训练,以得到训练完成的图神经网络模型;将待诊断振动信号输入到训练完成的图神经网络模型中,得到所述待诊断振动信号的预测结果,本文可以提高轴承故障诊断能力。
技术研发人员:张哲闻,吴立锋
受保护的技术使用者:首都师范大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!