三维组合标靶系统及其标定方法
本发明涉及靶标系统构建。具体地说是三维组合标靶系统及其标定方法。
背景技术:
1、时空基准是指时间和地理空间维度上的基本参考依据和度量的起算数据,是经济建设、国防建设和社会发展的重要基础设施,是时空大数据在时间和空间维度上的基本依据。对于地下空间的测绘,需要获得统一的能够满足地下空间测绘精度要求的点云数据,从数据采集到数据解算再到数据优化,都需要有可靠的时空参考。
2、在地面上的移动测量过程中,安装在载体上的gnss与imu通过各种耦合方式,能够克服各自的缺点,实现良好的位姿输出,为移动lidar测量系统提供稳定的定位与导航。但在地下空间盲环境中,单纯依靠imu航位推算,难以维持长时间高精度数据采集,必须依靠稳固的参考基准实现大场景三维数据的空间统一。使用控制标靶是提升自动车辆导航系统的定位精度,消除轨迹误差的有效方法(misra,2020)。控制标靶作为具有绝对坐标的点插入到扫描场景中,可以作为gnss信号缺失时的连接点,控制标靶被激光扫描系统采集后,采集场景可以与每个可用标靶的坐标进行配准,将激光扫描结果转换到到基准坐标系中(如gnss坐标系),为移动系统提供高精度的定位信息(gao,2018)。平面标靶或立体标靶(如球型标靶,柱形标靶、锥形标靶等)常被用作控制标靶,将激光扫描点数据转换到参考坐标系来代替gnss信息,也可用于消除轨迹误差。
3、众多学者基于移动lidar点云数据研发了不同形态的标靶以提升定位精度:平面标靶或平面特征具有制作简单、容易提取的优点,在辅助导航方面得到了广泛应用(im,2016;javanmardi,2019;lenac,2017)。球形标靶具有定位准确、便于拟合的优势,能够实现点云的快速精确匹配,从而实现辅助定位及导航应用(hata,2016;wang,2014;yun,2015)。柱形标靶具有结构简单,容易使用其它柱状地物代替的优势,在辅助导航定位领域也得到了广泛研究(you,2019;li,2016;chan,2015)。锥形标靶(liu,2019)和二十面体标靶(liu,2021)也能够基于有限的标靶数量,实现更为准确的位姿参数信息,从而提升定位与导航的精度。自然标靶则从扫描场景中根据需要进行选择,无需额外布设标靶,在辅助定位方面具有先天优势(madhavan,2004;ayawli,2018)。
4、上述标靶具有各自优势,但在进行地下空间移动测量时,尤其狭长的空间,对标靶的布设增添了限制,也提出了更高的要求:(1)标靶的数量要尽可能少,以减少测量工作量,提升效率;(2)要能够提供足够高精度的位姿参考;(3)在点云数据中能够便于准确提取;(4)要包含尽可能多的信息量。
技术实现思路
1、为此,本发明所要解决的技术问题在于提供一种更能适应地下空间测量的三维组合标靶系统及其标定方法。
2、为解决上述技术问题,本发明提供如下技术方案:
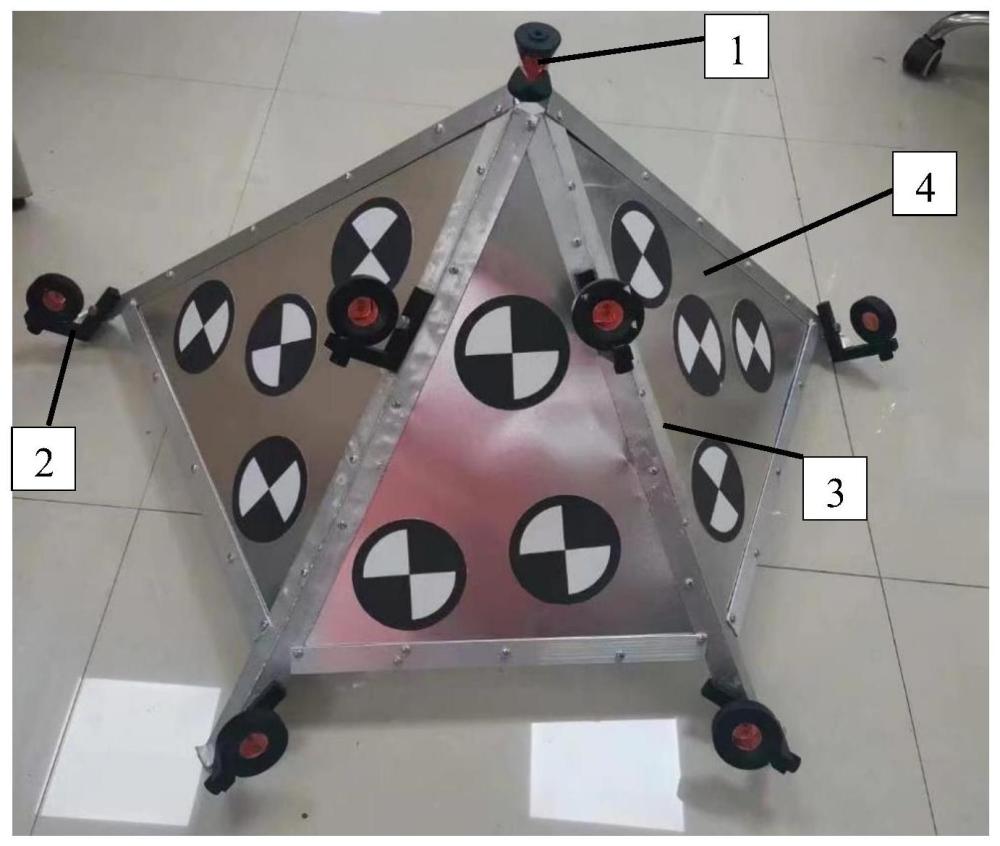
3、三维组合标靶系统,由棱镜组合系统、图形标靶组合系统和刚体框架三部分组成,所述棱镜组合系统包括一个360°棱镜(1)和六个双面l型棱镜(2);所述刚体框架包括铝合金固定框条(3)和用铝合金固定框条固定的铝合金板(4);一个360°棱镜(1)和六个双面l型棱镜(2)安装在铝合金固定框条(3)上,图形标靶组合系统粘贴在铝合金板(4)上。
4、上述三维组合标靶系统铝合金固定框条(3)为4根,4根铝合金固定框条(3)顶端固定在一起,相邻两根铝合金固定框条(3)的底端撑开,构成4个三角形平面;其中相邻三个三角形平面中,每两个三角形平面的夹角为120°,在这三个三角形平面上,通过4根铝合金固定框条(3)固定铝合金板(4);在第四个三角形平面中,设置水平支撑条(5),水平支撑条(5)的两端分别固定在相邻两根铝合金固定框条(3)上。
5、上述三维组合标靶系统,铝合金板(4)的厚度为0.8mm,铝合金固定框条(3)为宽度2cm的l型角铝。
6、本技术设计的三维组合标靶系统,确保相邻的三个三角形平面中,每两个三角形平面的夹角为120°,车载lidar可以获取更多的标靶点云数据;
7、上述三维组合标靶系统,360°棱镜(1)固定安装在3根铝合金固定框条(3)顶端;六个双面l型棱镜(2)固定安装在3根铝合金固定框条(3)的底端和中部,且需要满足每三个双面l型棱镜(2)的棱镜中心不在同一条直线上。
8、在顶部设置1个360°棱镜有利于全站仪对标靶顶部数据的观测;1个360°棱镜与6个双面l型棱镜相互组合,可以使每三个棱镜中心不在同一条直线,保证每三个棱镜可以确立一个独立的平面,确保了坐标匹配的精度。相比于传统的标靶系统,本技术降低高度,增大接地面积,提高标靶的整体稳定性。
9、上述三维组合标靶系统,图形标靶组合系统中,图形标靶的形状为圆形,直径为10cm,图形标靶的材质为布纹纸,且背面为背胶纸,便于粘贴;圆形的图形标靶的图案为:圆形四等分,两个相对的四分之一圆为黑色,另外两个相对的四分之一圆为白色;每一块三角形的铝合金板(4)上均匀分布粘贴3-5个图形标靶,总共10-15个图形标靶;圆形标靶,方便利用算法对圆心进行精确提取。
10、三维组合标靶系统的标定方法,需要确定棱镜组合系统中各棱镜之间、图形标靶组合系统中各图形标靶之间、棱镜组合系统与图形标靶组合系统之间的空间相对关系;包括如下步骤:
11、(1)图形标靶的提取定位;每个子标靶图形要先确定其中心,并在此基础上,确定与其相对应的激光扫描点,从点的信息中获取相应的位置和姿态信息,通过与基准位置和姿态的对应关系,进行平差计算,解算出位置和姿态校正参数,然后通过误差分配,达到对数据点云的误差纠正;
12、(2)三维组合标靶的一体化标定;
13、(3)空间关系的确定。
14、上述三维组合标靶系统的标定方法,在步骤(1)中,
15、(1-1)标靶点云分割:依据反射强度直方图统计信息,设置分割阈值,将扫描点云粗分割为标靶点云和非标靶点云;在三维组合标靶系统中,图形标靶相互之间保持一定的距离,因此采用聚类方法,将每个标靶点云聚类为一个点集,依据标靶尺寸的先验信息,从原始点云中将平面标靶及其周围一定范围内的点云提取出来,作为下一步分割的基础;
16、(1-2)外轮廓点提取:通过具有旋转不变性的强度变化率提取标靶外轮廓边缘点;对于点云p,先查找当前点的k邻近点点集q={qi|i∈[1,k]},k为大于1的正整数,再计算点云邻域内的强度变化率f,如式(1):
17、
18、其中,pin、qi.in分别为点p和qi的反射强度,||pqi||为pqi的距离;
19、(1-3)标靶平面旋转变换:受激光扫描误差的影响,初步选择的图形标靶点云并不严格在一个平面上,而是存在一定厚度,需将点云拟合至一个平面,在平面内进行标靶轮廓的拟合;采用主成分分析法pca,计算标靶平面法向量,根据法向量将标靶平面旋转至xoy平面;
20、根据主成分分析法pca计算点云平面法向量,计算点云协方差矩阵qcov,以及点云协方差矩阵qcov的特征值和特征向量,最小特征值对应的特征向量即为点云平面的法向量;其中qcov为:
21、
22、x、y、z分别为点的三维坐标;
23、根据标靶平面法向量,计算出标靶平面分别绕x轴、y轴的旋转角为:
24、
25、
26、其中,α,β为标靶平面分别绕x轴、y轴的旋转角;l1、l2、l3分别为标靶平面法向量在x、y、z方向的向量值;
27、为加快计算速度,仅对边缘轮廓点进行旋转变换,旋转矩阵r为:
28、
29、(1-4)丹麦法m估计:通过边缘点拟合圆来定位标靶中心,在二维平面内,圆方程定义为:
30、x2+y2+ax+by+c=0 (6);
31、其中,a、b和c为圆的一般方程参数,且
32、
33、xc、yc为拟合圆的中心坐标、r为拟合圆的半径,根据计算出的a、b、c可得拟合圆的中心坐标和半径:
34、
35、标靶轮廓点云中任意点pi列的误差方程为:
36、
37、其中,vi为第i个点的误差,xi,yi为第i个点的平面坐标;n为第n个点;
38、所有标靶轮廓点的误差方程为:
39、
40、当无粗差点存在时,标靶边缘点云误差假设服从高斯分布,采用最小二乘拟合算法,能够获得最佳拟合结果;
41、当点云存在某一单一方向粗差时,通过丹麦法m估计,进行选权迭代确定各点权因子wi,能有效降低粗差的影响;通过丹麦法确权方法,迭代获取最佳权因子:
42、
43、其中i为边缘点的序号,v为误差值,f为限差,按照经验,其中为vi的中误差;最佳权因子确定后,更新权矩阵为:
44、
45、w为最佳权因子矩阵;
46、迭代计算直到改正数v收敛,收敛条件为vt-vt-1<q,其中t、q分别为迭代次数和收敛阈值;
47、经过范数最小的m估计进行圆拟合,得到投影至平面的标靶点云中心平面坐标;因标靶在z方向上,仅受激光测距误差影响,取所有点的均值为xoy平面的标靶中心z值;然后根据获取到的标靶向xoy平面旋转的旋转矩阵公式(5),逆变换获得标靶中心点在原空间中的坐标;逆变换方式为:
48、x=r-1xc (13)
49、其中x、xc分别为原空间、投影后的标靶中心坐标,r为公式(5)中的旋转矩阵。
50、上述三维组合标靶系统的标定方法,在步骤(2)中,包括:
51、(2-1)全站仪近距离测量:三维组合标靶系统的标定是确立各棱镜中心以及各图形标靶中心坐标之间的空间相对关系,不需要外部参考坐标,使用精密全站仪近距离对各棱镜中心及图形标靶中心在全站仪自定义坐标系内的坐标;
52、(2-2)精密平差:三维组合标靶系统的各观测点呈空间立体分布,为增加平差计算的严密性,提升平差精度,采用基于重心基准的加权秩亏网平差模型。
53、上述三维组合标靶系统的标定方法,在步骤(3)中,完成一体化标定后,棱镜中心及图形标靶中心的空间相对位置关系严格确定,具有空间不变性,只要测得不共面的四个及以上中心点坐标,其他中心点的坐标都可以通过标定数据解算出来。
54、上述三维组合标靶系统的标定方法,中心点的坐标的处理方法如下:
55、把各棱镜中心观测数据设为点集q测,标定数据设为点集q标,点集q标的复制点集为q′标,具有与点集q标相同的数据;以点集q测为参考,采用基于稳健估计的icp点集匹配方法,将点集q′标匹配到点集q测上,在此过程中,q测中个别测量误差较大的点被排除,不再参与匹配计算;在迭代匹配过程中,点集q′标中各点坐标值不断变化,但各点的整体空间关系不变,迭代计算结束后,点集q′标中各点与点集q测中各对应点的坐标值接近,且都统一在参考坐标系下,使用点集q′标中各点的坐标值取代点集q测中各对应点的坐标值,完成观测数据的优化,根据棱镜标靶系统与图形标靶系统之间的标定参数,计算出各图形标靶中心点在参考坐标系中的坐标值。
56、本发明的技术方案取得了如下有益的技术效果:
57、棱镜组合系统、图形标靶组合系统以及棱镜组合系统和图形标靶组合系统之间都进行了严密的空间标定。三维组合标靶系统相当于密集分布的、精密标定的、便于布设与测量的控制点组合,具有兼顾精密测量和移动点云扫描的作用,放置在地下移动lidar测量系统行进路线附近,能够获取密集的激光点云数据。
58、只要获得三个棱镜标靶坐标,即可把外界参考坐标的位姿传递到标靶系统中,之所以安装7个棱镜,一方面是为了避免遮挡等因素造成的数据量不足,另一方面是当进行多于3个观测值时产生多余观测,对观测值进行平差能提高测量精度,还可以剔除质量较差的观测值,保证数据的可靠性。同理,多个平面图形标靶的设置也能提升观测数据的精度和可靠性。
59、三维组合标靶系统是外部基准坐标系统与移动lidar测量系统之间位姿联系的纽带,精确的标定是实现精确位姿传递的前提和基础,标定工作包括棱镜组合系统中各棱镜间、图形标靶系统中各图形标靶之间、棱镜组合系统与图形标靶组合系统之间的空间相对关系。
60、精确提取标靶图形中心位置是位置、姿态校正的重要环节,为此,提出了m估计的稳健平面标靶中心定位算法。
61、棱镜组合系统、图形标靶组合系统以及棱镜组合系统和图形标靶组合系统之间都进行了严密的空间标定。三维组合标靶系统相当于密集分布的、精密标定的、便于布设与测量的控制点组合,具有兼顾精密测量和移动点云扫描的作用,放置在地下移动lidar测量系统行进路线附近,能够获取密集的激光点云数据。
62、通过三维组合标靶系统的研发,利用精密标定的密集标靶组合,有效解决了地下空间控制点频繁测设的问题,能够同时实现位置和姿态的精准传递。
- 还没有人留言评论。精彩留言会获得点赞!