一种具有垂直智能泊车辅助功能实车测试系统及方法与流程
本发明属于汽车电气测试,具体涉及一种具有垂直智能泊车辅助功能的实车测试系统及方法。
背景技术:
1、随着汽车智能化相关技术的研发和应用,汽车的智能化功能也随之日益增加。作为智能驾驶的典型功能,智能泊车功能广泛应用于各汽车制造商的产品中,针对此类新增的智能驾驶功能,对其功能完整性、功能可靠性以及性能指标的测试验证提出了新的挑战。
2、目前,针对自主垂直智能泊车的测试验证大多集中在虚拟仿真测试,即通过上位机与硬件在环平台配合,通过模拟外部环境与关联控制器来执行汽车在虚拟动态环境下自主垂直智能泊车功能。此类仿真测试缺少真实环境,过于理想化,很难模拟出真实复杂场景下干扰的雷达回波。除此之外,考虑到仿真测试缺少智能泊车功能真实关联的控制器,不能充分表现实车智能泊车功能的结果,如是否可以准确泊入车位,泊入后的执行效果等。而传统的实车智能泊车功能测试数据精度存在误差,因此,需要使用高精度定位智能泊车测试系统进一步提升测试结果的准确性。
技术实现思路
1、本发明的目的就在于提供一种具有垂直智能泊车辅助功能的实车测试系统及方法,以解决提升实车垂直泊车测试数据的精确性的问题。
2、本发明的目的是通过以下技术方案实现的:
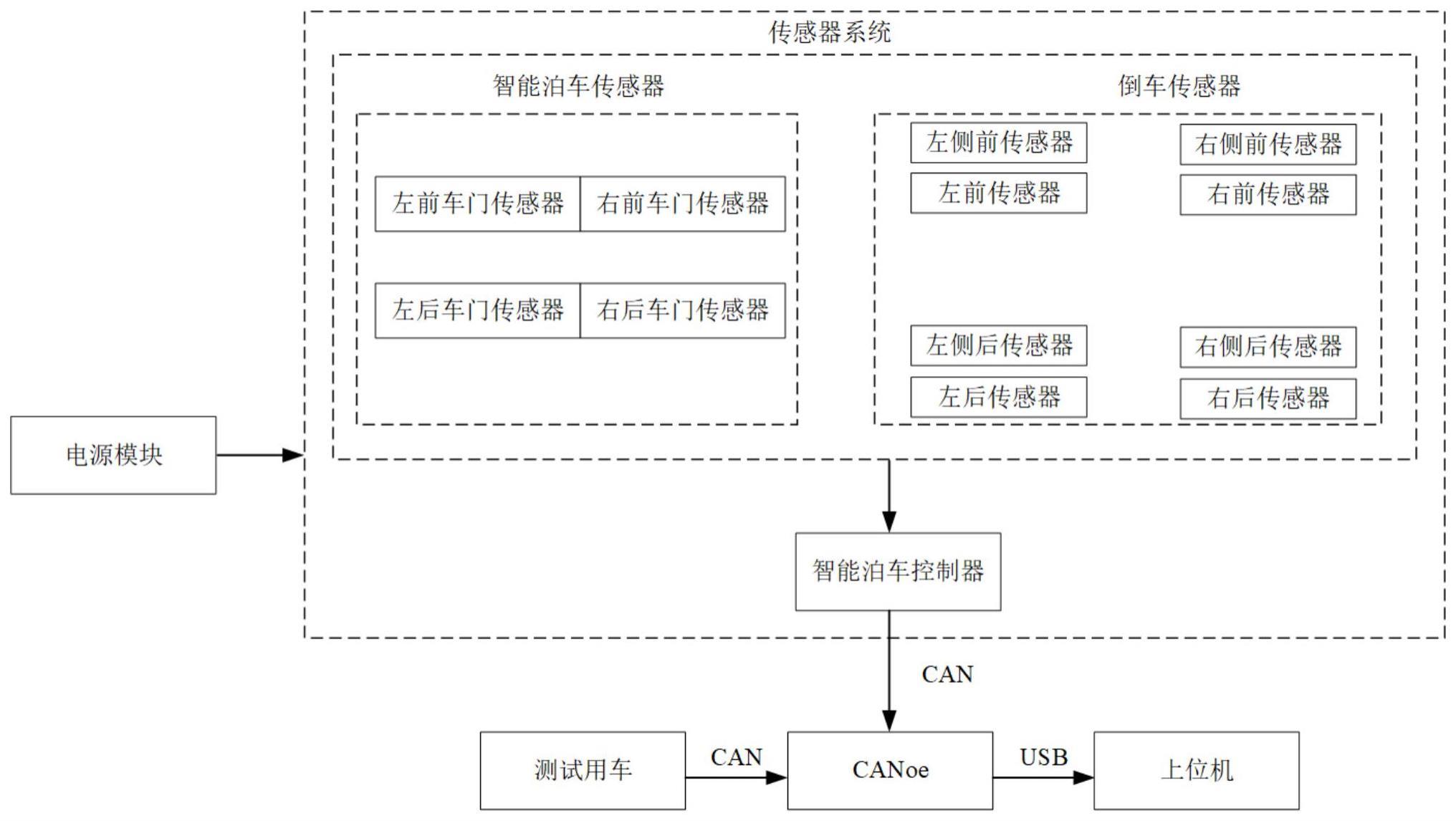
3、一种具有垂直智能泊车辅助功能实车测试系统,包括传感器系统、智能泊车控制器、汽车can盒工具和上位机;
4、其中,所述传感器系统由智能泊车传感器和倒车传感器组成;
5、所述智能泊车传感器分布在4个车门下方,包括左前车门传感器、右前车门传感器、左后车门传感器和右后车门传感器,各传感器分别与智能泊车控制器相连,将采集到的信息传输至智能泊车控制器。
6、所述倒车传感器分布在车辆前后保险杠上,与智能泊车控制器连接,由智能泊车控制器驱动传感器发射超声波信号,并能够将采集的障碍物回波信号传输至智能泊车控制器;所述智能泊车控制器,能够判断出障碍物的位置和距离,并将其转换为can信号;
7、所述智能泊车传感器、测试车辆分别与汽车can盒工具通过can总线相连,汽车can盒工具与上位机相连,利用汽车can盒工具的canoe将接收智能泊车传感器与测试车辆自身总线信号,发送至上位机,获得自主水平智能泊车相应的测试数据。
8、进一步地,还包括电源模块,所述电源模块分别与传感器系统和智能泊车控制器电连接,为其供电。
9、进一步地,所述倒车传感器包括左侧前传感器、左前传感器、右前传感器、右侧前传感器、左侧后传感器、左后传感器、右侧后传感器和右后传感器,各传感器信息融合,共同完成信息采集工作,可获得对应车辆姿态以及车辆的速度,加速度数据信息。
10、进一步地,所述智能泊车控制器能根据各传感器回传的数据进行数据逻辑运算处理,判断出障碍物的位置和距离。
11、进一步地,所述汽车can盒工具通过usb接口与上位机相连。
12、一种具有垂直智能泊车辅助功能实车测试方法,包括以下步骤:
13、a、搭建传感器系统:在4个车门的下方分别设置左前车门传感器、右前车门传感器、左后车门传感器和右后车门传感器。在车辆前后保险杠上设置左侧前传感器、左前传感器、右前传感器、右侧前传感器、左侧后传感器、左后传感器、右侧后传感器和右后传感器;再搭建垂直倒车的停车位场景;
14、b、标定,调整主车与目标车之间的实际位置与系统输出位置距离,修正误差,使系统输出距离与实际距离保持一致;
15、c、完成智能泊车传感器及倒车传感器的标定后,按照测试内容,通过改变测试车辆周围目标车的相对位置,获得不同类型与不同尺寸的垂直智能泊车距离;记录垂直智能泊车后的车辆与停车位中的车辆左右的距离以及据车位边线的距离;
16、d、开启测试系统,数据采集转换装置按主车和目标车进行区分。采用超声波测距原理,由智能泊车控制器驱动传感器发射超声波信号,当超声波信号遇到障碍物时,反射回波信号,再由传感器接收处理,并回传至智能泊车控制器进行数据逻辑运算处理,判断出障碍物的位置和距离;
17、e、通过上位机接收数据采集转换装置发出500kbit的can数据,获得自主垂直智能泊车期间车辆的距离道路两侧的车位长度或宽度,选定适合的车位后,智能泊车控制器自动计算泊车轨迹,并自动泊入到搜索到的车位;当车辆达到目标位置后,通过上位机接收测试车辆自车的can总线数据,监控并记录自主垂直智能泊车期间档位切换、距离检测等信号变化,并对以上数据实时显示与记录存储。
18、f、垂直倒车驶入停车位,垂直智能泊车完成后,通过计算获得与目标车辆的垂直智能泊车表现,包括被测车辆各轮与垂直停车位道线的空隙距离、车头基于垂直智能泊车方向情况、车辆基于行驶方向倾斜情况等。实现客观验证与评价车辆的自主垂直智能泊车功能。
19、进一步地,如果障碍物距离达到设定的警示限值时,智能泊车控制器发出警示信息,通过can总线经由canoe发送至上位机中,同时车载音响喇叭及车机显示屏。
20、与现有技术相比,本发明的有益效果是:
21、本发明提供一种具有垂直智能泊车辅助功能的实车测试系统及方法,通过该系统获得对应车辆姿态以及车辆的速度,加速度等数据信息,并基于测试数据判断泊车性能表现;提升实车垂直泊车测试数据的精确性,并解决上述在虚拟环境下仿真测试所带来的理想化、实际表现不充分以及没有较强说服力等问题,通过实车验证垂直智能泊车功能的有效性与完整性,保障测试质量,为自主垂直智能泊车的电气功能测试提供有效解决方案。
技术特征:
1.一种具有垂直智能泊车辅助功能实车测试系统,其特征在于:包括传感器系统、智能泊车控制器、汽车can盒工具和上位机;
2.根据权利要求1所述的一种具有垂直智能泊车辅助功能实车测试系统,其特征在于:还包括电源模块,所述电源模块分别与传感器系统和智能泊车控制器电连接,为其供电。
3.根据权利要求1所述的一种具有垂直智能泊车辅助功能实车测试系统,其特征在于:所述倒车传感器包括左侧前传感器、左前传感器、右前传感器、右侧前传感器、左侧后传感器、左后传感器、右侧后传感器和右后传感器,各传感器信息融合,共同完成信息采集工作,可获得对应车辆姿态以及车辆的速度,加速度数据信息。
4.根据权利要求1所述的一种具有垂直智能泊车辅助功能实车测试系统,其特征在于:所述智能泊车控制器能根据各传感器回传的数据进行数据逻辑运算处理,判断出障碍物的位置和距离。
5.根据权利要求1所述的一种具有垂直智能泊车辅助功能实车测试系统,其特征在于:所述汽车can盒工具通过usb接口与上位机相连。
6.一种具有垂直智能泊车辅助功能实车测试方法,其特征在于,包括以下步骤:
7.根据权利要求6所述的一种具有垂直智能泊车辅助功能实车测试方法,其特征在于:如果障碍物距离达到设定的警示限值时,智能泊车控制器发出警示信息,通过can总线经由canoe发送至上位机中,同时车载音响喇叭及车机显示屏。
技术总结
本发明涉及一种具有垂直智能泊车辅助功能实车测试系统及方法,系统包括智能泊车传感器、倒车传感器、智能泊车控制器、汽车CAN盒工具和上位机;智能泊车传感器和倒车传感器分别与智能泊车控制器连接,由智能泊车控制器驱动传感器发射超声波信号,将采集的障碍物回波信号传输至智能泊车控制器,判断出障碍物的位置和距离,将其转换为CAN信号;智能泊车传感器、测试车辆分别与汽车CAN盒工具相连,利用汽车CAN盒工具的CANoe将接收智能泊车传感器与测试车辆自身总线信号发送至上位机,获得自主水平智能泊车相应的测试数据。本发明能提升实车垂直泊车测试数据的精确性,通过实车验证垂直智能泊车功能的有效性与完整性,保障测试质量。
技术研发人员:陆雨,刘德利,谷原野,孙运玺,王升鑫,白爽,张海波,王晰聪,张红月,郝孟杰
受保护的技术使用者:一汽奔腾轿车有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!