一种机器人搭载的混凝土裂缝超声检测装置及方法与流程
本发明涉及混凝土裂缝检测,尤其涉及一种机器人搭载的混凝土裂缝超声检测装置及方法。
背景技术:
1、目前针对大型水电站引水压力钢管背管的检测仍以人工检测为主,由于背管结构尺寸大,检测人员劳动强度大,危险性高,检测效率低。有学者提出利用机器人技术开展对压力钢管背管混凝土表面裂缝进行检测。目前现有的混凝土表面裂缝深度的典型检测手段是利用成对的超声波探头对称布置在混凝土裂缝的两侧,设定不同的检测间距分组进行检测,这种无损非接触式检测在人工操作时相对容易,在设定好距离后,涂抹耦合剂,然后将超声探头垂直表面压入耦合剂内进行检测。
2、这种操作技术目前未见有自动化检测技术和装备。困难之处在于两方面,分别是可靠移动与吸附的移动载体技术和可实现机器人搭载的超声检测装置,其中机器人搭载的超声检测装置要能够模拟人工检测流程以及做业工具的特性。这两方面的技术困难极大限制了水电站背管等大型基础设施混凝土结构表面的裂缝自动化检测。
技术实现思路
1、针对现有技术中所存在的不足,本发明提供了一种机器人搭载的混凝土裂缝超声检测装置及方法。
2、为了实现上述目的,根据本发明的一个技术方案,一种机器人搭载的混凝土裂缝超声检测装置,包括支撑架、测距调整机构、耦合剂释放装置、反对称调高机构及超声检测装置,其中支撑架固定安装在机器人本体上,测距调整机构固定安装在支撑架上,两套反对称调高机构分别滑动连接在测距调整机构的两端,耦合剂释放装置和超声检测装置分别安装在反对称调高机构上,测距调整机构用于实现两对反对称调高机构之间距离的调整,反对称调高机构实现耦合剂释放装置和超声检测装置高度的上下反向调整,耦合释放机构用于在混凝土表面涂抹耦合剂,两个超声检测装置的配对使用,用于实现对混凝土裂缝的检测。
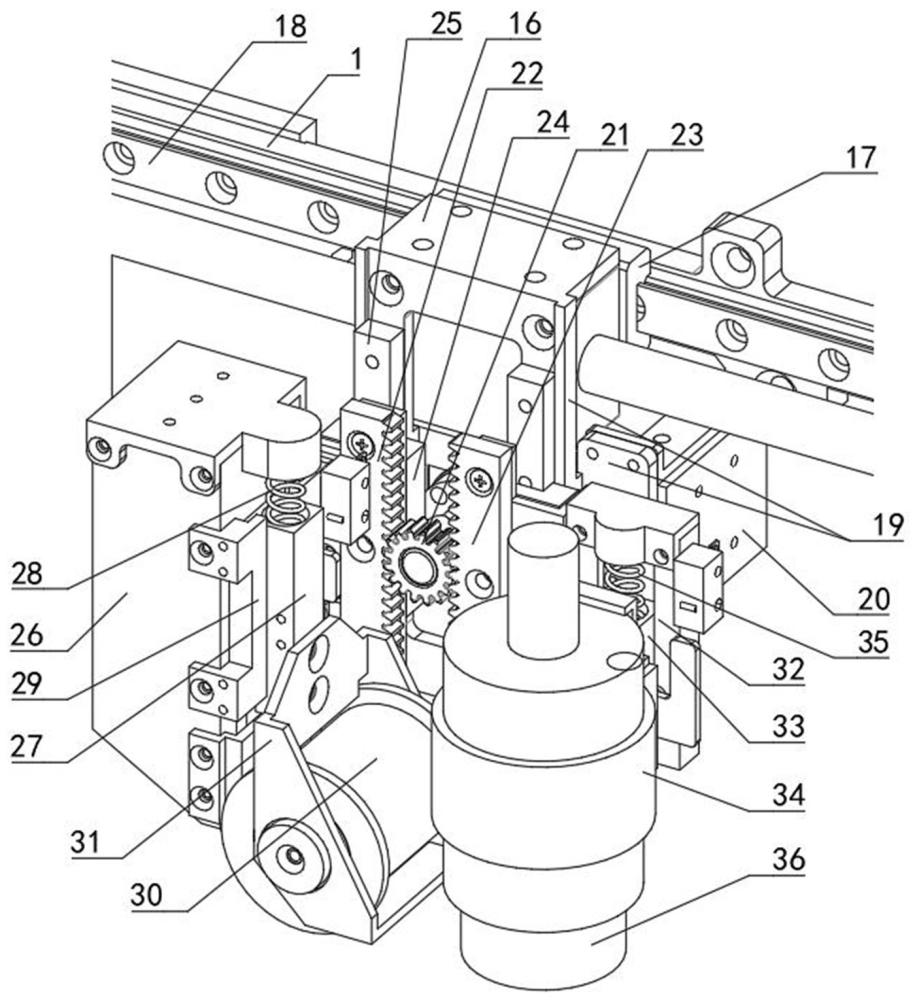
3、更进一步的,所述测距调整机构包括调整驱动电机、调整同步带轮、调整同步带、支撑轴承、左右旋丝杠、调整丝母、调整滑块及横向导轨,其中调整驱动电机固定连接在支撑架上,一对调整同步带轮分别固定连接在调整驱动电机输出转轴上和左右旋丝杠上,左右旋丝杠通过支撑轴承转动连接在支撑架上,一对调整丝母对称布置在左右旋丝杠上,并与调整滑块固定连接,调整滑块滑动连接在横向导轨上,横向导轨固定连接在支撑架上。
4、更进一步的,所述反对称调高机构包括丝母连接板、调高电机、调高齿轮、耦合剂调高齿条、超声探头调高齿条、调高滑块及调高导轨,其中丝母连接板固定安装在调整丝母上,调高电机固定连接到丝母连接板上,调高电机带动调高齿轮转动,调高导轨固定连接在调整丝母上,耦合剂调高齿条、超声探头调高齿条分别固定在两个调高滑块上,调高滑块与调高导轨滑动连接使调高滑块沿调高导轨竖直升降,耦合剂调高齿条、超声探头调高齿条分别对称布置在调高齿轮的两侧并与调高齿轮啮齿配合,当调高电机转动时,实现耦合剂调高齿条和超声探头调高齿条相对于调高齿轮实现反对称上下升降。
5、更进一步的,所述耦合剂释放装置包括耦合剂腔体、腔体阀门、弹簧支撑、阀门导向槽、耦合剂铺设滚轮及滚轮支架,其中耦合剂腔体与耦合剂调高齿条固定连接,阀门导向槽固定连接在耦合剂腔体的外侧,腔体阀门的下部封闭住耦合剂腔体,腔体阀门与阀门导向槽滑动连接并可沿着阀门导向槽上下运动,腔体阀门与滚轮支架固定连接,滚轮支架与调整滑块固定连接,耦合剂铺设滚轮转动连接在滚轮支架上。
6、更进一步的,所述腔体阀门与耦合剂腔体顶面之间固定连接有支撑弹簧。
7、更进一步的,所述超声检测装置本体包括竖直滑槽、竖直升降滑块、超声安装架、超声限位弹簧及超声探头,其中竖直滑槽固定连接在超声探头调高齿条上,竖直升降滑块滑动连接在竖直滑槽上,超声安装架固定连接在竖直升降滑块上,超声探头固定装设在超声安装架上。
8、更进一步的,所述竖直升降滑块与竖直滑槽的顶板之间固定装设有限位弹簧。
9、根据本发明的另一个技术方案,一种机器人搭载的混凝土裂缝超声检测方法,使用上述的检测装置,包括以下步骤:
10、通过支撑架固定在机器人移动本体上,支撑架上固定连接了横向导轨,横向导轨前后对称布置了调整滑块,调整滑块与调整丝母固定连接,左右旋丝杠的端部通过滚动轴承,连接到支撑架上,左右旋丝杠的轴线与导轨平行布置,左右旋丝杠由调整同步带轮驱动,而调整同步带轮是由调整驱动电机驱动及调整同步带传动实现转动,调整驱动电机旋转,通过调整同步带及调整同步带轮驱动左右旋丝杠旋转,两个调整丝母相向或相背而行,从而实现与调整丝母连接的两套反对称调高机构相对左右旋丝杠中间位置间距的对称调整,该间距调整即为超声探头的检测间距调整;
11、在反对称调高机构相对左右旋丝杠中间位置调整完成后,首先调高电机转动,调高齿轮转动,带动耦合剂调高齿条下降,随着耦合剂腔体的高度降低,耦合剂铺设滚轮首先与地面接触,耦合剂铺设滚轮和滚轮支架随着腔体阀门沿阀门导向槽相对耦合剂腔体上移,直到腔体阀门完成打开,耦合剂从耦合剂腔体释放流出,填充到耦合剂铺设滚轮前部,此时调整驱动电机旋转再次驱动,驱动反对称调高机构在左右旋丝杠上移动,从而将耦合剂涂于混凝土表面;
12、在混凝土表面涂铺一段长度后,调高电机反向转动升起耦合剂腔体,腔体阀门关闭了耦合剂腔体,耦合剂腔体在提升的同时,超声探头调高齿条下降,当反对称调高机构的耦合剂调高齿条和超声探头调高齿条高度一致时,调高电机停止转动,此时调整驱动电机旋转,使得两个调整丝母间距进一步增大,直至超声探头运动到铺设的耦合剂上方,调整驱动电机停止转动,其后调高电机继续旋转,使得超声探头调高齿条高度进一步降低,直至超声探头压入耦合剂,触碰到混凝土表面,继而开始超声检测。
13、相比于现有技术,本发明具有如下有益效果:
14、1、本发明能够搭载到爬壁机器人上,实现对大型桥梁桥墩、桥塔、混凝土坝体、大型水电站混凝土背管等检测人员很难到达或者具有高危特性的混凝土裂缝表面进行检测;
15、2、本发明能够实现机器人搭载,并能够模拟人工检测的作业过程,在混凝土表面裂缝两侧涂抹耦合剂,并将超声探头竖直贴附混凝土表面的耦合剂上,实现对混凝土裂缝超声检测;
16、3、本发明能够以较少的机构自由度数即运动关节和驱动电机,模拟混凝土表面裂缝人工检测作业过程,在裂缝两侧多轮次、更加准确地布置超声检测位置,为大型混凝体结构表面的裂缝精准检测提供技术解决方案。
技术特征:
1.一种机器人搭载的混凝土裂缝超声检测装置,包括支撑架、测距调整机构、耦合剂释放装置、反对称调高机构及超声检测装置,其中支撑架固定安装在机器人本体上,测距调整机构固定安装在支撑架上,两套反对称调高机构分别滑动连接在测距调整机构的两端,耦合剂释放装置和超声检测装置分别安装在反对称调高机构上,测距调整机构用于实现两对反对称调高机构之间距离的调整,反对称调高机构实现耦合剂释放装置和超声检测装置高度的上下反向调整,耦合释放机构用于在混凝土表面涂抹耦合剂,两个超声检测装置的配对使用,用于实现对混凝土裂缝的检测。
2.如权利要求1所述的一种机器人搭载的混凝土裂缝超声检测装置,其特征在于,所述测距调整机构包括调整驱动电机、调整同步带轮、调整同步带、支撑轴承、左右旋丝杠、调整丝母、调整滑块及横向导轨,其中调整驱动电机固定连接在支撑架上,一对调整同步带轮分别固定连接在调整驱动电机输出转轴上和左右旋丝杠上,左右旋丝杠通过支撑轴承转动连接在支撑架上,一对调整丝母对称布置在左右旋丝杠上,并与调整滑块固定连接,调整滑块滑动连接在横向导轨上,横向导轨固定连接在支撑架上。
3.如权利要求1所述的一种机器人搭载的混凝土裂缝超声检测装置,其特征在于,所述反对称调高机构包括丝母连接板、调高电机、调高齿轮、耦合剂调高齿条、超声探头调高齿条、调高滑块及调高导轨,其中丝母连接板固定安装在调整丝母上,调高电机固定连接到丝母连接板上,调高电机带动调高齿轮转动,调高导轨固定连接在调整丝母上,耦合剂调高齿条、超声探头调高齿条分别固定在两个调高滑块上,调高滑块与调高导轨滑动连接使调高滑块沿调高导轨竖直升降,耦合剂调高齿条、超声探头调高齿条分别对称布置在调高齿轮的两侧并与调高齿轮啮齿配合。
4.如权利要求1所述的一种机器人搭载的混凝土裂缝超声检测装置,其特征在于,所述耦合剂释放装置包括耦合剂腔体、腔体阀门、阀门导向槽、耦合剂铺设滚轮及滚轮支架,其中耦合剂腔体与耦合剂调高齿条固定连接,阀门导向槽固定连接在耦合剂腔体的外侧,腔体阀门的下部封闭住耦合剂腔体,腔体阀门与阀门导向槽滑动连接并可沿着阀门导向槽上下运动,腔体阀门与滚轮支架固定连接,滚轮支架与调整滑块固定连接,耦合剂铺设滚轮转动连接在滚轮支架上。
5.如权利要求4所述的一种机器人搭载的混凝土裂缝超声检测装置,其特征在于,所述腔体阀门与耦合剂腔体顶面之间固定连接有支撑弹簧。
6.如权利要求1所述的一种机器人搭载的混凝土裂缝超声检测装置,其特征在于,所述超声检测装置本体包括竖直滑槽、竖直升降滑块、超声安装架及超声探头,其中竖直滑槽固定连接在超声探头调高齿条上,竖直升降滑块滑动连接在竖直滑槽上,超声安装架固定连接在竖直升降滑块上,超声探头固定装设在超声安装架上。
7.如权利要求6所述的一种机器人搭载的混凝土裂缝超声检测装置,其特征在于,所述竖直升降滑块与竖直滑槽的顶板之间固定装设有限位弹簧。
8.一种机器人搭载的混凝土裂缝超声检测方法,其特征在于,使用如权利要求1~7所述的检测装置,包括以下步骤:
技术总结
本发明提供了一种机器人搭载的混凝土裂缝超声检测装置,包括支撑架、测距调整机构、耦合剂释放装置、反对称调高机构及超声检测装置,其中支撑架固定安装在机器人本体上,测距调整机构固定安装在支撑架上,两套反对称调高机构分别滑动连接在测距调整机构的两端,耦合剂释放装置和超声检测装置分别安装在反对称调高机构上,测距调整机构用于实现两对反对称调高机构之间距离的调整,反对称调高机构实现耦合剂释放装置和超声检测装置高度的上下反向调整。本发明提供了一种机器人搭载的混凝土裂缝超声检测方法,实现对大型桥梁桥墩、桥塔、混凝土坝体、大型水电站混凝土背管等检测人员很难到达或者具有高危特性的混凝土裂缝表面进行检测。
技术研发人员:覃戈,胡军,钟恒,陈正虎,常勇,王天龙,王洪光
受保护的技术使用者:中国长江电力股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!