一种避障感知方法、装置、无人飞行器及介质与流程
本技术实施例涉及无人飞行器,尤其涉及一种避障感知方法、装置、无人飞行器及介质。
背景技术:
1、无人飞行器在飞行的时候,可能处于多种不同的飞行环境,比如低空飞行、高空飞行。为了保障无人飞行器的安全,通常设置有避障系统,通过避障系统,当无人飞行器在飞行的过程中遇到障碍物时,可以自动识别及有效规避障碍物,来保障安全飞行。
2、现有技术中,针对不同的飞行环境,在避障的时候,容易存在多种噪声干扰,可能无法精确且全方位检测无人飞行器飞行过程中的障碍物。
技术实现思路
1、本技术实施例的目的是提供一种避障感知方法、装置、无人飞行器及介质,通过对无人飞行器若干个方向的点云进行扇区分析,可以精确检测来自无人飞行器各个方向的障碍物,实现各个方向的目标跟踪,提高障碍物感知的稳定性。
2、为解决上述技术问题,本技术实施例采用以下技术方案:
3、第一方面,本技术实施例中提供给了一种避障感知方法,所述方法包括:
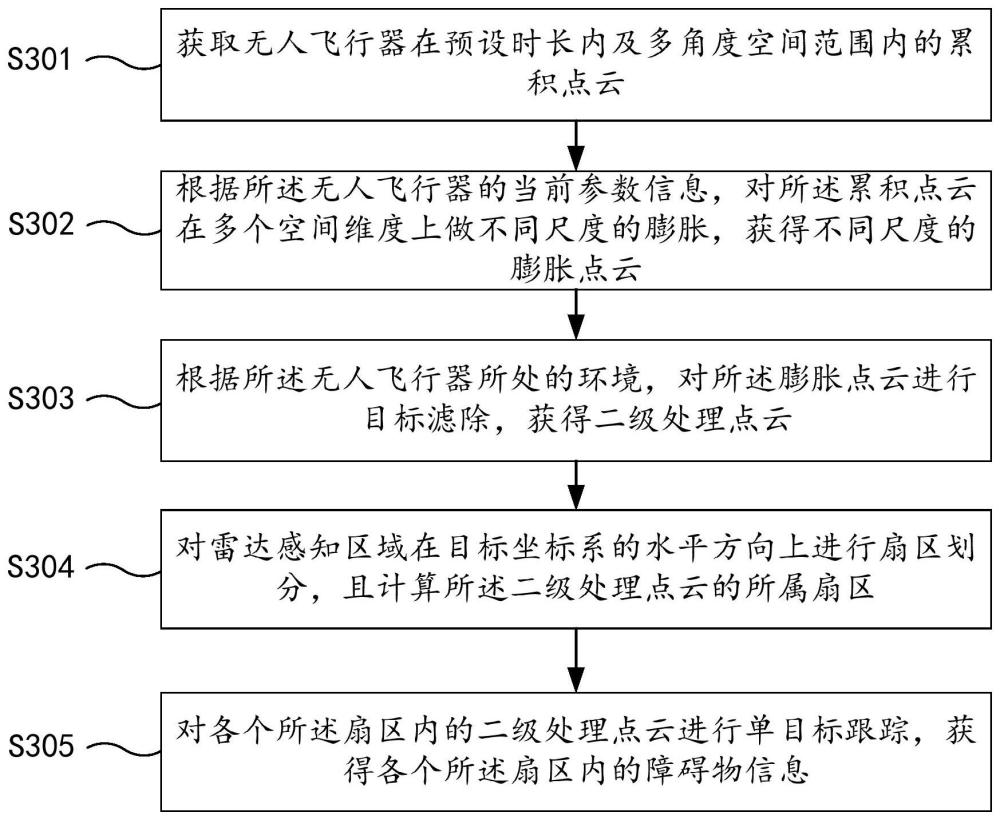
4、获取无人飞行器在预设时长内及多角度空间范围内的累积点云;
5、根据所述无人飞行器的当前参数信息,对所述累积点云在多个空间维度上做不同尺度的膨胀,获得不同尺度的膨胀点云;
6、根据所述无人飞行器所处的环境,对所述膨胀点云进行目标滤除,获得二级处理点云;
7、对雷达感知区域在目标坐标系的水平方向上进行扇区划分,且计算所述二级处理点云的所属扇区;
8、对各个所述扇区内的二级处理点云进行单目标跟踪,获得各个所述扇区内的障碍物信息。
9、在一些实施例中,所述获取无人飞行器在预设时长内及多角度空间范围内的累积点云,包括:
10、获取无人飞行器在若干个方向上的雷达点云;
11、对所述雷达点云进行预处理,以去除所述雷达点云中的不可信点云及地面目标点云,获得预处理点云;
12、在预设时长内以及所述若干个方向分别对应的多角度空间范围内,累积所述预处理点云,获得所述累积点云。
13、在一些实施例中,对所述雷达点云进行预处理,以去除所述雷达点云中的不可信点云,获得预处理点云,包括:
14、在所述无人飞行器处于静止状态时,如果检测到所述雷达点云中存在不可信点云,则将所述不可信点云剔除;
15、其中,所述不可信点云包括点云速度不为零的点云、点云能量小于预设能量的点云、置信度小于预设置信度的点云中的任一种;
16、所述点云能量对应的点云为距离所述无人飞行器的点云小于预设距离的点云。
17、在一些实施例中,对所述雷达点云进行预处理,以去除所述雷达点云中的地面目标点云,获得预处理点云,包括:
18、根据所述雷达点云的俯仰角,计算所述雷达点云距离所述无人飞行器的点云高度;
19、根据所述点云高度及所述无人飞行器的当前对地高度值,判断所述雷达点云中是否存在地面目标点云;
20、如果所述雷达点云中存在所述地面目标点云,则将所述地面目标点云删除。
21、在一些实施例中,所述在预设时长内以及所述若干个方向分别对应的空间范围内,累积所述预处理点云,获得所述累积点云,包括:
22、在所述预设时长内以及所述若干个方向分别对应的角度空间范围内,如果所述累积点云中,存在点云数量小于预设数量阈值的稀疏点云,则将所述稀疏点云删除。
23、在一些实施例中,所述根据所述无人飞行器的当前参数信息,对所述累积点云在多个空间维度上做不同尺度的膨胀,获得不同尺度的膨胀点云,包括:
24、根据所述无人飞行器的当前参数信息,确定多个空间维度上的所述累积点云的距离分辨率及膨胀角度;
25、计算所述累积点云中的各个目标点云分别与所述无人飞行器对应方向上的雷达之间的目标距离;
26、基于所述累积点云的距离分辨率、所述膨胀角度及所述目标距离,计算不同空间维度下的所述目标点云的膨胀距离,以获得不同尺度的膨胀点云。
27、在一些实施例中,所述基于所述累积点云的距离分辨率、所述膨胀角度及所述目标距离,计算不同空间维度下的所述目标点云的膨胀距离,以获得不同尺度的膨胀点云,包括:
28、根据所述无人飞行器的当前任务需求和当前环境感知数据,确定目标尺度或尺度组合;
29、基于所述目标尺度或所述尺度组合调整所述累积点云的距离分辨率及所述膨胀角度,以获得不同尺度的膨胀点云。
30、在一些实施例中,所述根据所述无人飞行器所处的环境,对所述膨胀点云进行目标滤除,获得二级处理点云,包括:
31、计算所述无人飞行器的对地高度值;
32、在所述对地高度值大于预设高度时,将所述膨胀点云中大于所述无人飞行器的第一高度阈值的点云删除;
33、在所述对地高度值小于所述预设高度时,将所述膨胀点云中大于所述无人飞行器的第二高度阈值的点云删除;
34、其中,所述第一高度阈值小于所述第二高度阈值。
35、在一些实施例中,所述对雷达感知区域在目标坐标系的水平方向上进行扇区划分,且计算所述二级处理点云的所属扇区,包括:
36、按照角度分辨率对雷达感知区域在目标坐标系的水平方向上进行扇区划分,获得若干个角度范围的扇区;
37、根据所述二级处理点云的方位角、所述雷达感知区域的最小方位角以及角度分辨率,确定所述二级处理点云中的各个点云的所属的角度范围的扇区。
38、在一些实施例中,在所述获得不同尺度的膨胀点云之后,且在对所述膨胀点云进行目标滤除之前,所述方法还包括:
39、将所述膨胀点云所在的参考坐标系转换为目标坐标系。
40、第二方面,本技术实施例还提供一种避障感知装置,所述装置包括:
41、累积点云获取模块,用于获取无人飞行器在预设时长内及多角度空间范围内的累积点云;
42、膨胀模块,用于根据所述无人飞行器的当前参数信息,对所述累积点云在多个空间维度上做不同尺度的膨胀,获得不同尺度的膨胀点云;
43、滤除模块,用于根据所述无人飞行器所处的环境,对所述膨胀点云进行目标滤除,获得二级处理点云;
44、扇区划分模块,用于对雷达感知区域在目标坐标系的水平方向上进行扇区划分,且计算所述二级处理点云的所属扇区;
45、跟踪模块,用于对各个所述扇区内的二级处理点云进行单目标跟踪,获得各个所述扇区内的障碍物信息。
46、第三方面,本技术还提供一种无人飞行器,所述无人飞行器包括:
47、至少一个飞控模组,以及
48、存储器,所述存储器与所述飞控模组通信连接,所述存储器存储有可被所述至少一个飞控模组执行的指令,所述指令被所述至少一个飞控模组执行,以使所述至少一个飞控模组能够执行如第一方面所述的方法。
49、第四方面,本技术还提供一种非易失性计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,当所述计算机可执行指令被无人飞行器执行时,使所述无人飞行器执行如第一方面任一项所述的方法。
50、本技术实施例的有益效果:区别于现有技术的情况,本技术实施例提供的避障感知方法、装置、无人飞行器及介质,无人飞行器在执行飞行任务时,获取无人飞行器在预设时长内及多角度空间范围内的累积点云,可以改善障碍物感知的稳定性,降低障碍物感知的漏检率;根据无人飞行器的当前参数信息,对各个空间维度中的累积点做不同尺度的膨胀,可以降低障碍物感知的漏检率,尽量避免避障失败;再进行目标滤除,可以滤除无关目标点云,对雷达感知区域进行扇区划分,并在各个扇区维持相对稳定的障碍物信息,能进一步准确感知障碍物相对于无人飞行器的位置,为避障提供稳定可靠的感知信息,保证无人飞行器飞行安全。
- 还没有人留言评论。精彩留言会获得点赞!