一种水下应答器位置校正方法与流程
本发明公开一种水下应答器位置校正方法,属于测量。
背景技术:
1、长基线水下定位技术对包括资源勘探、科学研究、生态保护以及国防等多个领域都具有重要作用,而其“水下应答器”的位置信息是否准确又是影响其定位精度的重要因素。传统的位置校准方法,利用水面船搭载水声问答机和卫星定位装置对水下应答器绕行,期间持续向水下应答器发送应答信号,并记录信号的传播时间,乘上平均声速得到问答机与应答器间的双程距离,再通过曲面交互模型求得水下应答器的位置。此方法粗糙的认为声线在水下直线匀速传播,导致定位精度不高;且需要对每一个应答器的位置依次进行校正,费时费力。
技术实现思路
1、本发明的目的在于提供一种水下应答器位置校正方法,以解决现有技术中,在对海底基阵进行位置校正时,受声线弯曲影响,定位精度差;需要对每个阵元进行单独的位置校正,费时费力的问题。
2、一种水下应答器位置校正方法,包括:
3、s1.布设应答器,问答机换能器向各应答器发送应答器间测距的指令;
4、s2.处理压力传感器数值,测量海水声速剖面;
5、s3.将换能器高程信息、应答器高程信息和声剖数据中的深度项归算到高程椭球面上;
6、s4.求解声线水平传播距离;
7、s5.采用基于最小二乘的平面交汇定位算法求解应答器的准确位置:
8、s6.通过二维基阵约束平差获得其他应答器的位置;
9、s7.完成水下应答器位置校正。
10、s1.1.试验船行驶到任务海域后,将多个应答器开机并在空气中静置1分钟,计算压力传感器的平均压力;
11、s1.2.布设各个应答器和与应答器绳系连接的浮球、锚块,记录应答器落水位置的经纬度坐标;
12、s1.3.船载甲板单元通过问答机换能器向各应答器发送应答器间测距的指令;
13、s1.4.各应答器接收到应答器间测距的指令后,向其他应答器依次发送声信号并接收其他应答器返回的信号,记录声信号由发射到接收的时间延迟。
14、s2.1.各应答器将采集到的时间延迟和压力数据通过水声通信发送给船载甲板单元;
15、s2.2.处理压力传感器数据,得到各应答器所处位置水深:
16、,为海水密度,g为当地重力加速度;
17、s2.3.用声速剖面仪测量海水声速剖面,测量问答机换能器的入水深度h和距离卫星天线的长度h,对海水声速剖面数据进行处理,只保留问答机换能器入水深度h到应答器深度之间的数据;
18、计算整个声速剖面每一层的声速梯度:
19、,为第i个位置的声速,为第i个位置的深度。
20、根据应答器落水位置坐标,实验船以应答器深度为半径围绕应答器低速航行并持续向应答器发送声信号,记录声信号由发射到接收的时间延迟,并通过卫星天线得到对应时刻的星定位数据,根据卫星定位数据,结合天线高h和换能器入水深度h,将换能器高程信息、应答器高程信息和声剖数据中的深度项归算到高程椭球面上,通过高斯克吕格投影得到投影后的换能器位置和应答器位置。
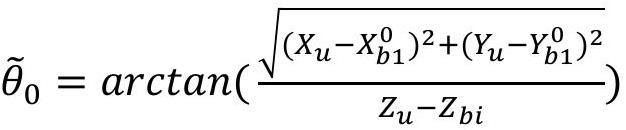
21、s4.1.计算粗略的声线入射角:
22、;
23、s4.2.根据斯涅尔定律,结合换能器深度处的声速和粗略的声线入射角得到初始snell常数:
24、。
25、s4.3.用高斯牛顿迭代法求准确的斯涅尔常数,迭代阈值为10-6:
26、;;;
27、;
28、式中,t为当前声线入射角和传播深度下对应的传播时间,f为中间变量,为第j次迭代所对应的斯涅尔常数,为第i层的声速梯度,df为中间变量;
29、s4.4.求波束入射角:
30、;
31、s4.5.根据准确的波束入射角求解声线水平传播距离:
32、。
33、s5.1.实验船绕布设下的应答器缓慢行驶,并不断发送测距信号,得到船载换能器的位置,声线水平传播距离,已知应答器的位置,构建观测方程:
34、 ;
35、s5.2.求方向余弦:
36、;;
37、式中:为应答器与问答机连线与正北方向的夹角,为应答器与问答机连线与正东方向的夹角,。
38、s5.3.求测距残差:
39、;
40、s5.4.观测方程线性化表示为:
41、;
42、式中,为东向位置偏差,为北向位置偏差;
43、将系数矩阵和已知量分别用a和l表示:
44、;
45、式中,a为系数矩阵,a=,l为已知量,l=;
46、求解得到:
47、;
48、得应答器的坐标为:
49、;
50、重复s5,获得应答器的准确位置。
51、s6.1.应答器间的应答信号的时延和对应深度的声速c得到各基线长度:
52、;
53、s6.2.使用s5的过程,得到应答器的初始位置;
54、s6.3.构建残差观测方程:
55、;
56、式中,、、、、表示改正数分量,、、、表示已知系数分量,、、、表示待定系数,、、、、表示已知值分量。
57、s6.4.改写残差观测方程为矩阵形式:
58、;
59、式中,v为改正数矩阵,b为已知系数矩阵,为待定系数矩阵,l为已知值矩阵;
60、;;
61、;
62、矩阵形式残差观测方程的待定系数按下式求解:
63、;
64、s6.5.得到应答器的准确位置:
65、。
66、相对比现有技术,本发明具有以下有益效果:解决了因声线弯曲对水下应答器定位精度的影响,有效保证了单个应答器的位置校正精度;只需精确的标校两个应答器的位置,便可结合应答器间测距信息,采用二维基阵约束平差的方法,得到其余应答器的准确位置,大大提高了作业效率。
技术特征:
1.一种水下应答器位置校正方法,其特征在于,包括:
2.根据权利要求1所述的一种水下应答器位置校正方法,其特征在于,s1包括:
3.根据权利要求2所述的一种水下应答器位置校正方法,其特征在于,s2包括:
4.根据权利要求3所述的一种水下应答器位置校正方法,其特征在于,s3包括:根据应答器落水位置坐标,实验船以应答器深度为半径围绕应答器低速航行并持续向应答器发送声信号,记录声信号由发射到接收的时间延迟,并通过卫星天线得到对应时刻的星定位数据,根据卫星定位数据,结合天线高h和换能器入水深度h,将换能器高程信息、应答器高程信息和声剖数据中的深度项归算到高程椭球面上,通过高斯克吕格投影得到投影后的换能器位置和应答器位置。
5.根据权利要求4所述的一种水下应答器位置校正方法,其特征在于,s4包括:
6.根据权利要求5所述的一种水下应答器位置校正方法,其特征在于,s4包括:
7.根据权利要求6所述的一种水下应答器位置校正方法,其特征在于,s5包括:
8.根据权利要求7所述的一种水下应答器位置校正方法,其特征在于,s5包括:
9.根据权利要求8所述的一种水下应答器位置校正方法,其特征在于,s6包括:
10.根据权利要求9所述的一种水下应答器位置校正方法,其特征在于,s6包括:
技术总结
本发明公开一种水下应答器位置校正方法,属于测量技术领域,用于对水下应答器进行位置校正,包括布设应答器,问答机换能器向各应答器发送应答器间测距的指令;处理压力传感器数值,测量海水声速剖面;将换能器高程信息、应答器高程信息和声剖数据中的深度项归算到高程椭球面上,求解声线水平传播距离;采用基于最小二乘的平面交汇定位算法求解应答器的准确位置,通过二维基阵约束平差获得其他应答器的位置。本发明解决了因声线弯曲对水下应答器定位精度的影响,有效保证了单个应答器的位置校正精度;只需精确的标校两个应答器的位置,便可结合应答器间测距信息,采用二维基阵约束平差的方法,得到其余应答器的准确位置,大大提高了作业效率。
技术研发人员:邵虎林,朱甘罗,郭晓云
受保护的技术使用者:青岛智能导航与控制研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!