一种基于毫米波雷达的实时跌倒检测方法
本发明涉及无线人体智能感知领域,特别涉及一种基于毫米波雷达的实时跌倒检测方法、实时跌倒检测模型的训练方法、电子设备和存储介质。
背景技术:
1、老年人和其他特定人群的医疗保健问题越来越受到关注,其中意外摔倒是老年人安全的主要威胁之一。为了解决这个问题,常采用基于速度识别的可穿戴设备来检测老年人的姿势,及时提供帮助。这些设备可以实时监测老年人的运动和姿态,并通过算法分析和识别是否发生摔倒事件。一旦检测到摔倒,设备会触发警报或发送通知,以便能够迅速采取行动并提供援助。
2、然而现有技术中,基于速度识别的跌倒检测方法在进行跌倒检测时容易产生误报,其他技术方案,例如基于无线信号的跌倒检测方法对不同环境与雷达部署方法依赖性较高。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于毫米波雷达的实时跌倒检测方法、实时跌倒检测模型的训练方法、电子设备和存储介质,以期至少能够解决上述问题之一。
2、根据本发明的第一个方面,提供了一种基于毫米波雷达的实时跌倒检测方法,包括:
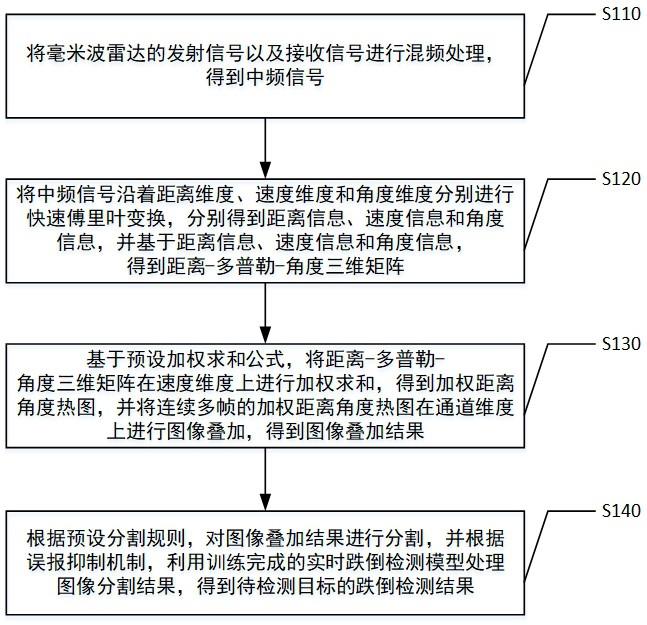
3、将毫米波雷达的发射信号以及接收信号进行混频处理,得到中频信号,其中,接收信号是待检测目标反射的雷达回波信号;
4、将中频信号沿着距离维度、速度维度和角度维度分别进行快速傅里叶变换,分别得到距离信息、速度信息和角度信息,并基于距离信息、速度信息和角度信息,得到距离-多普勒-角度三维矩阵;
5、基于预设加权求和公式,将距离-多普勒-角度三维矩阵在速度维度上进行加权求和,得到加权距离角度热图,并将连续多帧的加权距离角度热图在通道维度上进行图像叠加,得到图像叠加结果;
6、根据预设分割规则,对图像叠加结果进行分割,并根据误报抑制机制,利用训练完成的实时跌倒检测模型处理图像分割结果,得到待检测目标的跌倒检测结果。
7、根据本发明的实施例,上述距离信息由公式(1)表示:
8、(1),
9、其中,速度信息由公式(2)表示:
10、(2),
11、其中,角度信息由公式(3)表示:
12、(3),
13、其中,预设加权求和公式由公式(4)表示:
14、(4),
15、其中,表征中频信号的频率,表征中频信号的斜率,表征光速,表征中频信号的波长,表征相邻两个中频信号之间的相位差,表征相邻两个中频信号之间的时间差,表征毫米波雷达相邻两个接收天线之间的距离,表示经过快速傅里叶变换后的中频信号的功率,和分别表示与速度信息相关的不同权重超参数。
16、根据本发明的实施例,上述误报抑制机制表示在连续多个时间窗口内检测到多次跌倒,则认定待检测目标跌倒,连续多个时间窗口内未检测到多次跌倒,则待检测目标跌倒为误报;
17、其中,误报的概率由公式(5)表示:
18、(5),
19、其中,表示训练完成的实时跌倒检测模型输出的分类结果,表示待检测目标跌倒的时间窗口的时刻位置。
20、根据本发明的第二个方面,提供了一种实时跌倒检测模型的训练方法,应用于基于毫米波雷达的实时跌倒检测方法,包括:
21、将毫米波雷达的训练发射信号和训练接收信号进行预处理,得到训练样本图像,并将训练样本图像进行数据增强,得到增强的训练样本图像,其中,训练接收信号是待检测目标反射的雷达回波信号;
22、通过信号处理方法将增强的训练样本图像进行处理以构建带有真值标签的正样本对,并利用实时跌倒检测模型处理正样本对,得到检测结果,其中,实时跌倒检测模型基于对比学习神经网络和分类神经网络进行构建;
23、利用预设的损失函数处理检测结果和正样本对的真值标签,得到损失值,并根据损失值对实时跌倒检测模型进行参数优化和更新;
24、迭代进行数据预处理、数据增强、正样本对构建、模型处理、损失计算以及参数优化和更新操作,直到满足预设训练条件,得到训练完成的实时跌倒检测模型。
25、根据本发明的实施例,上述将毫米波雷达的训练发射信号和训练接收信号进行预处理,得到训练样本图像包括:
26、将毫米波雷达的训练发射信号和训练接收信号进行混频处理,得到训练中频信号,并将训练中频信号沿着速度维度、距离维度和角度维度分别进行快速傅里叶变换,得到速度信息、距离信息和角度信息;
27、基于速度信息、距离信息和角度信息得到距离-多普勒-角度三维矩阵,并将距离-多普勒-角度三维矩阵在速度维度上进行加权求和,将所得到的连续多帧的加权距离角度热图在通道维度上进行图像叠加,得到训练样本图像。
28、根据本发明的实施例,上述将训练样本图像进行数据增强,得到增强的训练样本图像包括:
29、将训练样本图像通过图像反转操作、图像平移操作以及图像抽帧操作进行数据增强,得到数据增强的训练样本图像;
30、将数据增强的训练样本图像通过重加权操作进行角度维度上的数据增强,得到增强的训练样本图像。
31、根据本发明的实施例,上述将数据增强的训练样本图像通过重加权操作进行角度维度上的数据增强,得到增强的训练样本图像包括角度分辨率数据增强、信号强度数据增强、垂直切向角度偏移与水平切向角度偏移的数据增强;
32、其中,角度分辨率数据增强由公式(6)表示:
33、(6),
34、其中,信号强度数据增强由公式(7)表示:
35、(7),
36、其中,垂直切向角度偏移与水平切向角度偏移的数据增强由公式(8)表示:
37、(8),
38、其中,表征中频信号的波长,表示毫米波雷达相邻天线之间的距离,表示待检测目标与所述毫米波雷达正对方向之间的夹角,表示毫米波雷达发射天线的信号功率,表示毫米波雷达发射天线的增益,表示毫米波雷达接收天线的增益,表示毫米波雷达发射信号的波长,表示毫米波雷达的天线数量,和表示毫米波雷达在三维空间中的坐标;表示毫米波雷达的散射截面,通过在重加权中调整的值可以实现角度维度上的数据增强,表示以()旋转中心对进行旋转的角度,()表示待检测目标的原始空间坐标,表示待检测目标旋转后的空间坐标,表示待检测目标与毫米波雷达之间的距离。
39、根据本发明的实施例,上述预设的损失函数包括对比损失函数和分类损失函数;
40、其中,对比损失函数由公式(9)表示:
41、(9),
42、其中,分类损失函数由公式(10)表示:
43、(10),
44、其中,表示温度超参数,表示正样本对,表示当前正在训练的样本图像,表示训练样本图像的数量,和表示分类损失函数的不同超参数,表示训练样本图像的真值标签,表示实时跌倒检测模型的预测值。
45、根据本发明的第三个方面,提供了一种电子设备,包括:
46、一个或多个处理器;
47、存储装置,用于存储一个或多个程序,
48、其中,当一个或多个程序被一个或多个处理器执行时,使得一个或多个处理器执行基于毫米波雷达的实时跌倒检测方法和实时跌倒检测模型的训练方法。
49、根据本发明的第四个方面,提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行基于毫米波雷达的实时跌倒检测方法和实时跌倒检测模型的训练方法。
50、本发明提供的上述基于毫米波雷达的实时跌倒检测方法,根据预设信号处理方法,通过将毫米波雷达按照时间顺序排列发射信号和接收信号进行处理以便过滤掉环境噪音的影响,并通过对比学习训练得到实时跌倒检测模型对过滤掉环境噪音的中频信号进行处理,实现了实时对待检测目标进行跌倒检测。本发明提供的上述实时跌倒检测方法,不受待检测目标所处环境的影响,在提高实时跌倒检测准确度的前提下,拓展了上述实时跌倒检测方法的应用场景。
- 还没有人留言评论。精彩留言会获得点赞!