基于GNSS坐标时间序列的地球参考框架评估方法及系统与流程
本发明涉及大地测量,特别涉及一种基于gnss坐标时间序列的地球参考框架评估方法及系统。
背景技术:
1、地球表面或近地空间质点的位置和运动均需在地球参考框架(terrestrialreference frame,trf)下进行定量描述。只有利用长期、稳定、精确的trf,才能准确描述任意质点的位置及变化。国际上应用广泛的trf包括国际地球参考框架(itrf,itrf88、89、90、91、92、93、94、96、97、2000、2005、2008、2014、2020),国际gnss服务(igs)参考框架(igs97、igs00、igb00、igs05、igs08、igs14、igb14、igs20),美国的wgs84,俄罗斯的pz-90、欧盟的gtrf以及我国的bdcs等。itrf是目前理论背景最完善,实现精度最高且应用最广泛的trf,为其他trf提供参考基准;igs参考框架、wgs84、pz-90、gtrf和bdcs,分别是igs产品、美国的全球定位系统(gps)、俄罗斯的全球卫星导航系统(glonass)、欧盟的全球卫星导航系统(galileo)和我国的北斗全球卫星导航系统(bds)所使用的trf。随着trf数量不断增多,各领域(例如,长期海平面变化监测、冰后回弹、板块构造运动、卫星精密定轨、精密授时、灾害预报等)对其精确度的要求逐步增高,有效的trf精确性评估方法格外重要。
2、目前建立trf使用的空间大地测量技术为slr(卫星激光测距,satellite laserranging),vlbi(甚长基线干涉测量,very long baseline interferometry),doris(多普勒无线电定轨定位系统doppler orbitography by radio positioning integrated onsatellite)和gnss,trf具体表现为全球分布的测站坐标及其变化。然而,由于测站的真实坐标是未知的,trf的精确性评估仍然面临挑战。一方面,已有的评估方法主要针对于itrf,该方法主要通过计算多个版本itrf的内符合精度来评定其精确性,而这种评估方法只能得到trf整体的自洽程度,而且可能会导致精确性的过高或过低估计。另一方面,利用冰川均衡调整模型、海底压强模型、重力数据、验潮站观测数据等外部数据(即建立trf时不采用的其他技术观测数据)评价trf的稳定性,然而由于外部数据精确度不足,trf的精确性评估仍然较为困难。
技术实现思路
1、本发明实施例的目的是提供一种基于gnss坐标时间序列的地球参考框架评估方法及系统,通过选取全球范围内参与建立trf的gnss测站坐标时间序列,通过从函数模型精确度和随机模型可靠度两方面评价trf的预测能力,综合评估trf的精确性,从而为全球用户选取使用trf提供参考。
2、为解决上述技术问题,本发明实施例的第一方面提供了一种基于gnss坐标时间序列的地球参考框架评估方法,包括如下步骤:
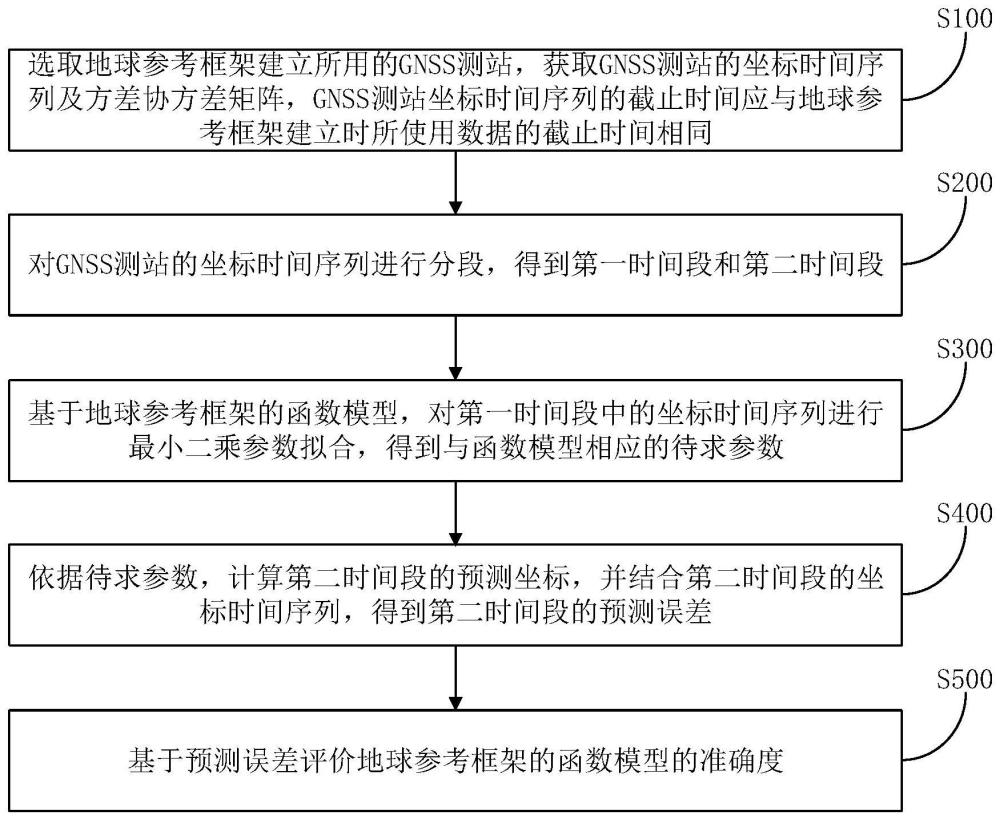
3、选取地球参考框架建立所用的gnss测站,获取所述gnss测站的坐标时间序列及方差协方差矩阵,所述gnss测站坐标时间序列的截止时间应与地球参考框架建立时所使用数据的截止时间相同;
4、对所述gnss测站的坐标时间序列进行分段,得到第一时间段和第二时间段;
5、基于所述地球参考框架的函数模型,对所述第一时间段中的坐标时间序列进行最小二乘参数拟合,得到与所述函数模型相应的待求参数;
6、依据所述待求参数,计算所述第二时间段的预测坐标,并结合所述第二时间段的坐标时间序列,得到所述第二时间段的预测误差;
7、基于所述预测误差评价所述地球参考框架的函数模型的准确度。
8、进一步地,所述得到所述第二时间段的预测误差之后,还包括:
9、基于所述预测误差计算所述预测坐标的方差矩阵;
10、依据所述预测坐标的方差矩阵评价所述地球参考框架的随机模型的可靠度。
11、进一步地,所述基于所述预测坐标的方差矩阵评价所述地球参考框架的随机模型的可靠度,包括:
12、获取所述预测误差平方和与所述预测坐标的方差矩阵的迹的差值;
13、当所述差值为0时,判定所述地球参考框架的随机模型可靠;
14、当所述差值大于0时,判定所述地球参考框架的随机模型低估了所述预测误差;
15、当所述差值小于0时,判定所述地球参考框架的随机模型高估了所述预测误差;
16、其中,所述差值绝对值越小,所述地球参考框架的随机模型越高。
17、进一步地,所述差值的计算公式为:
18、
19、其中,n为表示参与评估的gnss测站总数,为所述预测误差,所述第二时间段的解的个数,为所述预测坐标的方差矩阵的迹,为所述预测坐标的方差矩阵。
20、进一步地,所述预测坐标的方差矩阵的计算公式为:
21、
22、其中,为所述预测误差,q为所述坐标时间序列的方差协方差矩阵,a为所述地球参考框架函数模型确定设计矩阵。
23、进一步地,所述基于所述预测误差评价所述地球参考框架的函数模型的准确度,包括:
24、计算所述第二时间段的预测误差的均方根值;
25、依据所述均方根值评价所述地球参考框架的函数模型的准确度;
26、其中,所述均方根值越小,所述预测坐标越准确,所述地球参考框架的函数模型精确度越高。
27、进一步地,所述均方根值的计算公式为:
28、
29、其中,n为表示参与评估的所述gnss测站总数,为所述预测误差,为所述第二时间段的解的个数。
30、进一步地,所述预测误差的计算公式为:
31、
32、
33、
34、
35、
36、其中,为所述第一时间段的坐标时间序列,为所述第二时间段的坐标时间序列,xi为所述待求参数,q为所述坐标时间序列的方差协方差矩阵,a为所述地球参考框架函数模型确定设计矩阵。
37、相应地,本发明实施例的第二方面提供了一种基于gnss坐标时间序列的地球参考框架评估系统,通过上述基于gnss坐标时间序列的地球参考框架评估方法进行评估,包括:
38、测站选取模块,其用于选取地球参考框架建立所用的gnss测站,获取所述gnss测站的坐标时间序列及方差协方差矩阵,所述gnss测站坐标时间序列的截止时间应与地球参考框架建立时所使用数据的截止时间相同;
39、时间分段模块,其用于对所述gnss测站的坐标时间序列进行分段,得到第一时间段和第二时间段;
40、参数拟合模块,其用于基于所述地球参考框架的函数模型,对所述第一时间段中的坐标时间序列进行最小二乘参数拟合,得到与所述函数模型相应的待求参数;
41、误差计算模块,其用于依据所述待求参数,计算所述第二时间段的预测坐标,并结合所述第二时间段的坐标时间序列,得到所述第二时间段的预测误差;
42、准确性评价模块,其用于基于所述预测误差评价所述地球参考框架的函数模型的准确度。
43、相应地,本发明实施例的第三方面提供了一种电子设备,其特征在于,包括:至少一个处理器;以及与所述至少一个处理器连接的存储器;其中,所述存储器存储有可被所述一个处理器执行的指令,所述指令被所述一个处理器执行,以使所述至少一个处理器执行上述基于gnss坐标时间序列的地球参考框架评估方法。
44、相应地,本发明实施例的第四方面提供了一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现上述基于gnss坐标时间序列的地球参考框架评估方法。
45、本发明实施例的上述技术方案具有如下有益的技术效果:
46、1、从trf用户使用的角度出发,将预测能力作为指标开展trf评估,提高了trf评估的普适性;
47、2、利用测站的预测坐标与原始坐标进行对比,避免了外部数据源精确度不足对trf评估的影响,提高了trf精确性评估的可靠性;
48、3、基于误差传播定律获取了预测坐标方差矩阵,并与实际预测误差进行对比,提高了trf精确性评估理论上的严密性。
- 还没有人留言评论。精彩留言会获得点赞!