样本处理设备及驱动装置的监控方法与流程
本发明涉及医疗设备领域,尤其涉及一种样本处理设备及驱动装置的监控方法。
背景技术:
1、相关技术提供的一种样本处理设备,例如全自动生化分析仪,在整机运行中,采用传动机构(尤其是同步带传动机构)传动的运动组件会有因同步带逐渐磨损,导致执行部件存在定位偏移的趋势。相关技术中,因为成本的限制,没有使用高精度编码器对执行部件的运动做定位判断,从而导致执行部件定位偏移的趋势和偏移量无法确定。
2、针对上述问题,相关技术采用的是定期调试位置的方式,对运动组件进行定期维护,但是调试位置的方法无法克服定位偏移,不利于样本处理设备运行的长期稳定性。因为调试位置是用动态找零坐标位建立的坐标,然后根据该坐标调试标定静态的工作位,这种调试方式短期是稳定的,长期工作后,零坐标位有变化,皮带张力有变化,从而导致标定的工作位在新坐标体系下有偏移,进而使得执行部件无法准确运动到工作位。
技术实现思路
1、本发明的第一个目的在于提供一种样本处理设备,其旨在解决相关技术中无法利用低成本实现定位偏移监控的技术问题。
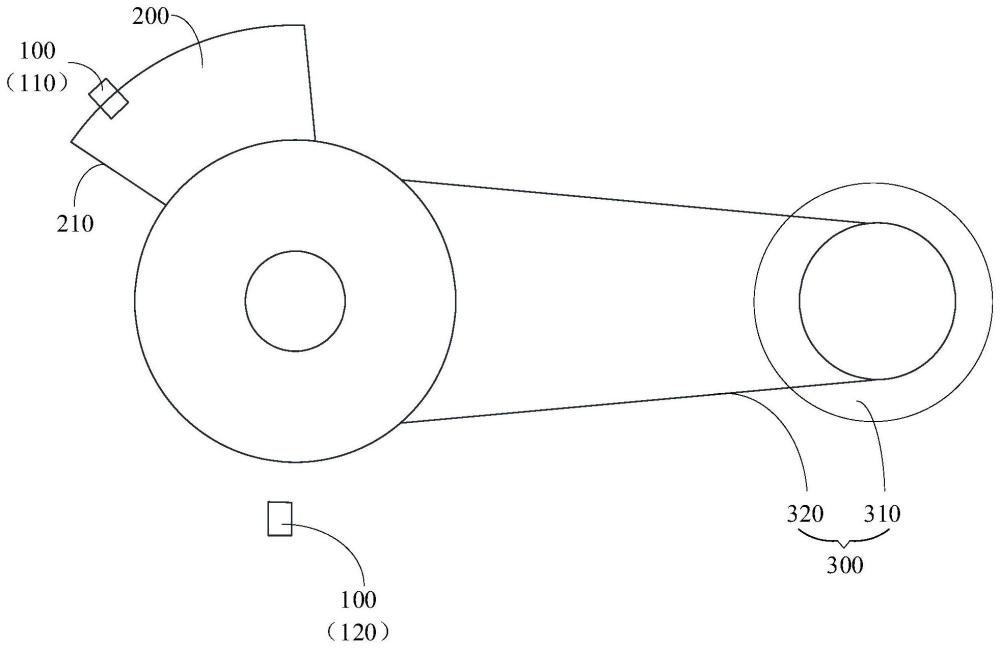
2、为达到上述目的,本发明提供的方案是:一种样本处理设备,包括驱动装置、执行部件、定位参考件、定位探测装置和控制器;
3、所述驱动装置与所述执行部件传动连接,以用于在所述控制器的控制下驱动所述执行部件运动;
4、所述定位参考件与所述执行部件一体成型,或者,所述定位参考件固定于所述执行部件并随所述执行部件同步运动;
5、所述定位探测装置用于探测所述定位参考件;
6、所述控制器被配置为:控制所述驱动装置驱动所述执行部件和所述定位参考件连续运动并停止于工作位,控制所述驱动装置间歇式运转以驱动所述执行部件和所述定位参考件从所述工作位开始间歇式运动,直至获取到所述定位探测装置反馈的第一触发信号,则判定所述执行部件和所述定位参考件运动至监控位,控制所述驱动装置停止驱动所述执行部件和所述定位参考件间歇式运动,记录所述驱动装置驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至监控位的工作参数,并根据所述工作参数判断所述驱动装置是否异常或者根据所述工作参数获取所述驱动装置的补偿参数,以在所述驱动装置驱动所述执行部件和所述定位参考件运动时采用所述补偿参数进行运动补偿。
7、作为一种实施方式,所述控制器控制所述驱动装置驱动所述执行部件和所述定位参考件连续运动并停止于工作位的方式包括:控制所述驱动装置驱动所述执行部件和所述定位参考件连续运动,在所述驱动装置连续运转的过程中,获取到所述定位探测装置反馈的第二触发信号,将获取到所述第二触发信号的位置确定为零坐标位,根据工作位与所述零坐标位的预设位置关系,控制所述驱动装置连续运转预设行程后停止运转,并判定所述执行部件和所述定位参考件停止的位置为所述工作位。
8、作为一种实施方式,所述定位探测装置包括至少一个对射式光电传感器,所述定位参考件形成有用于分别触发所述对射式光电传感器产生所述第一触发信号和所述第二触发信号的标记部。
9、作为一种实施方式,所述定位探测装置包括第一对射式光电传感器和第二对射式光电传感器,所述第一对射式光电传感器和所述第二对射式光电传感器沿所述定位参考件的运动轨迹间隔分布;
10、在所述第一对射式光电传感器向所述控制器反馈所述第一触发信号时,所述控制器确定所述定位参考件运动至所述监控位;
11、在所述第二对射式光电传感器向所述控制器反馈所述第二触发信号时,所述控制器确定所述定位参考件运动至所述零坐标位。
12、作为一种实施方式,所述工作位的数量为至少一个,所述第一对射式光电传感器的数量为一个;或者,
13、所述第一对射式光电传感器的数量与所述工作位的数量都为至少两个,且所述第一对射式光电传感器的数量与所述工作位的数量相等,每个所述工作位的旁侧分别对应设置一个所述第一对射式光电传感器。
14、作为一种实施方式,所述定位探测装置包括一个第三对射式光电传感器;
15、在所述第三对射式光电传感器向所述控制器反馈所述第一触发信号时,所述控制器确定所述定位参考件运动至所述监控位;
16、在所述第三对射式光电传感器向所述控制器反馈所述第二触发信号时,所述控制器确定所述定位参考件运动至所述零坐标位。
17、作为一种实施方式,用于触发所述对射式光电传感器产生所述第一触发信号的标记部和用于触发所述对射式光电传感器产生所述第二触发信号的标记部位于所述定位参考件上的同一个部位;或者,
18、用于触发所述对射式光电传感器产生所述第一触发信号的标记部和用于触发所述对射式光电传感器产生所述第二触发信号的标记部分别位于所述定位参考件上的两个不同部位,所述两个不同部位沿所述定位参考件的运动方向间隔分布。
19、作为一种实施方式,所述定位参考件为能够遮挡光线的遮光部件,所述遮光部件具有在所述定位参考件运动方向上相对设置的两个第一侧边缘,所述标记部包括至少一个所述第一侧边缘;或者,
20、所述定位参考件局部凸设有能够遮挡光线的遮光结构,所述遮光结构具有在所述定位参考件运动方向上相对设置的两个第二侧边缘,所述标记部包括至少一个所述第二侧边缘;或者,
21、所述定位参考件局部开设有能够供光线透过的透光孔,所述透光孔具有在所述定位参考件运动方向上相对设置的两个内侧壁边缘,所述标记部包括至少一个所述内侧壁边缘。
22、作为一种实施方式,所述执行部件为盘状部件,所述驱动装置用于驱动所述执行部件转动,所述定位参考件为凸设于所述盘状部件局部的凸齿,所述标记部包括所述凸齿相对的两个侧边缘,所述凸齿的一个侧边缘经过所述对射式光电传感器时,所述对射式光电传感器产生所述第一触发信号,所述凸齿的另一个侧边缘经过所述对射式光电传感器时,所述对射式光电传感器产生所述第二触发信号。
23、作为一种实施方式,所述控制器判断所述驱动装置是否异常包括:将所述驱动装置驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至所述监控位的工作参数与预设数值比较,如果所述工作参数与所述预设数值的差值在预设范围内,则判定所述驱动装置没有异常,并根据所述工作参数获取所述驱动装置的补偿参数,以在所述驱动装置驱动所述执行部件运动时采用所述补偿参数进行运动补偿;且/或,
24、所述样本处理设备还包括报警装置,所述控制器判断所述驱动装置是否异常包括:将所述驱动装置驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至所述监控位的工作参数与预设数值比较,如果所述工作参数与所述预设数值的差值大于预设范围,则判定所述驱动装置异常,并控制所述报警装置发出警示信号。
25、作为一种实施方式,所述控制器通过一步一停的方式控制所述驱动装置间歇式运转以驱动所述执行部件和所述定位参考件从所述工作位开始间歇式运动。
26、作为一种实施方式,所述驱动装置包括电机和传动机构,所述传动机构传动连接于所述电机与所述执行部件之间;
27、所述控制器控制所述驱动装置间歇式运转包括:控制所述电机周期性启停。
28、作为一种实施方式,所述电机为步进电机,所述工作参数包括所述步进电机驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至监控位的运转步数;且/或,
29、所述传动机构包括带传动机构、齿轮传动机构、链传动机构、蜗轮蜗杆传动机构、连杆机构中的至少一种。
30、作为一种实施方式,所述样本处理设备为样本分析仪,所述执行部件为如下部件中的一种:用于承载反应容器的反应盘,用于承载试剂容器的试剂盘,用于吸取样本的样本针,用于吸取试剂的试剂针,用于搅拌样本和/或试剂的搅拌杆;且/或,
31、所述样本处理设备配置有工作模式和监控模式,在所述工作模式下,控制器被配置为:控制所述驱动装置驱动所述执行部件连续运动并停止于所述工作位,控制所述执行部件执行该工作位的功能动作;在所述监控模式下,所述控制器被配置为:控制所述驱动装置驱动所述执行部件和所述定位参考件连续运动并停止于工作位,控制所述驱动装置间歇式运转以驱动所述执行部件和所述定位参考件从所述工作位开始间歇式运动,直至获取到所述定位探测装置反馈的第一触发信号,则判定所述执行部件和所述定位参考件运动至监控位,控制所述驱动装置停止驱动所述执行部件和所述定位参考件间歇式运动,记录所述驱动装置驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至监控位的工作参数,并根据所述工作参数判断所述驱动装置是否异常或者根据所述工作参数获取所述驱动装置的补偿参数,以在所述驱动装置运动时采用所述补偿参数进行运动补偿。
32、本发明的第二个目的在于提供一种驱动装置的监控方法,该监控方法包括如下步骤:
33、控制驱动装置驱动执行部件和定位参考件连续运动并停止于工作位;
34、控制所述驱动装置间歇式运转以驱动所述执行部件和所述定位参考件从所述工作位开始间歇式运动,直至获取到定位探测装置反馈的第一触发信号,则判定所述执行部件和所述定位参考件运动至监控位,控制所述驱动装置停止驱动所述执行部件和所述定位参考件间歇式运动;
35、记录所述驱动装置驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至监控位的工作参数,并根据所述工作参数判断所述驱动装置是否异常,或者根据所述工作参数获取所述驱动装置的补偿参数,以在所述驱动装置驱动所述执行部件和所述定位参考件运动时采用所述补偿参数进行运动补偿。
36、作为一种实施方式,所述控制所述驱动装置驱动所述执行部件和所述定位参考件连续运动并停止于工作位包括:控制所述驱动装置驱动所述执行部件和所述定位参考件连续运动,在所述驱动装置连续运转的过程中,获取到所述定位探测装置反馈的第二触发信号,将获取到所述第二触发信号的位置确定为零坐标位,根据工作位与所述零坐标的预设位置关系,控制所述驱动装置连续运转预设行程后停止运转,并判定所述执行部件和所述定位参考件停止的位置为所述工作位。
37、作为一种实施方式,所述获取到定位探测装置反馈的第一触发信号包括:获取到第一对射式光电传感器向所述控制器反馈的所述第一触发信号;
38、所述获取到所述定位探测装置反馈的第二触发信号包括:获取到所述第二对射式光电传感器向所述控制器反馈的所述第二触发信号;
39、其中,所述第一对射式光电传感器和所述第二对射式光电传感器沿所述定位参考件的运动轨迹间隔分布。
40、作为一种实施方式,所述获取到定位探测装置反馈的第一触发信号包括:获取到第三对射式光电传感器向所述控制器反馈的所述第一触发信号;
41、所述获取到所述定位探测装置反馈的第二触发信号包括:获取到所述第三对射式光电传感器向所述控制器反馈的所述第二触发信号。
42、作为一种实施方式,所述判断所述驱动装置是否异常包括:将所述驱动装置驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至所述监控位的工作参数与预设数值比较,如果所述工作参数与所述预设数值的差值在预设范围内,则判定所述驱动装置没有异常,并根据所述工作参数获取所述驱动装置的补偿参数,以在所述驱动装置驱动所述执行部件运动时采用所述补偿参数进行运动补偿;且/或,
43、所述判断所述驱动装置是否异常包括:将所述驱动装置驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至所述监控位的工作参数与预设数值比较,如果所述工作参数与所述预设数值的差值大于预设范围,则判定所述驱动装置没有异常,并控制报警装置发出警示信号。
44、作为一种实施方式,所述工作参数包括:步进电机驱动所述执行部件和所述定位参考件从所述工作位间歇式运动至监控位的运转步数。
45、本发明提供的样本处理设备及驱动装置的监控方法,通过控制驱动装置驱动执行部件和定位参考件连续运动并停止于工作位,控制驱动装置间歇式运转以驱动执行部件和定位参考件间歇式运动,直至获取到定位探测装置反馈的第一触发信号,则判定执行部件和定位参考件运动至监控位,控制驱动装置停止驱动执行部件和定位参考件间歇式运动,记录驱动装置驱动执行部件和定位参考件从工作位间歇式运动至监控位的工作参数,并判断驱动装置是否异常或者根据工作参数获取驱动装置的补偿参数,以在驱动装置运动时采用补偿参数进行运动补偿。由于工作位是静态停止到位的,且监控位是通过间歇式运动到位停止的,即监控位相当于是静态找到位的,静态停止的工作位与静态找到的监控位,有同步变化关系,从而可以排除动态驱动装置抖动的干扰,进而利于实现低成本定位监控,利于延长设备的维护周期,降低维护成本,且利于自动侦测运行健康状态,提前预警。
- 还没有人留言评论。精彩留言会获得点赞!