一种新型三轴硅微陀螺仪
本发明涉及三轴陀螺仪,具体是一种新型三轴硅微陀螺仪。
背景技术:
1、三轴陀螺仪是惯性导航系统的核心敏感器件,可以同时测量x轴、y轴、z轴方向上的角速度输入,其广泛应用于军事导航、深空探测等高精尖领域,具有极其广泛的应用前景。现有三轴陀螺仪主要分为两类:一类是组装式三轴陀螺仪(由三个单轴陀螺仪组装而成),此种三轴陀螺仪受组装工艺所限,存在测量精度低的问题。另一类是单片集成式三轴陀螺仪,此种三轴陀螺仪存在的问题是:其一,无法实现各驱动、检测方向的完全解耦,导致各模态之间的耦合误差大,由此导致测量精度低。其二,结构和加工工艺复杂,导致难以实现大批量生产,由此导致生产成本高。基于此,有必要发明一种新型三轴硅微陀螺仪,以解决现有三轴陀螺仪测量精度低、生产成本高的问题。
技术实现思路
1、本发明为了解决现有三轴陀螺仪测量精度低、生产成本高的问题,提供了一种新型三轴硅微陀螺仪。
2、本发明是采用如下技术方案实现的:
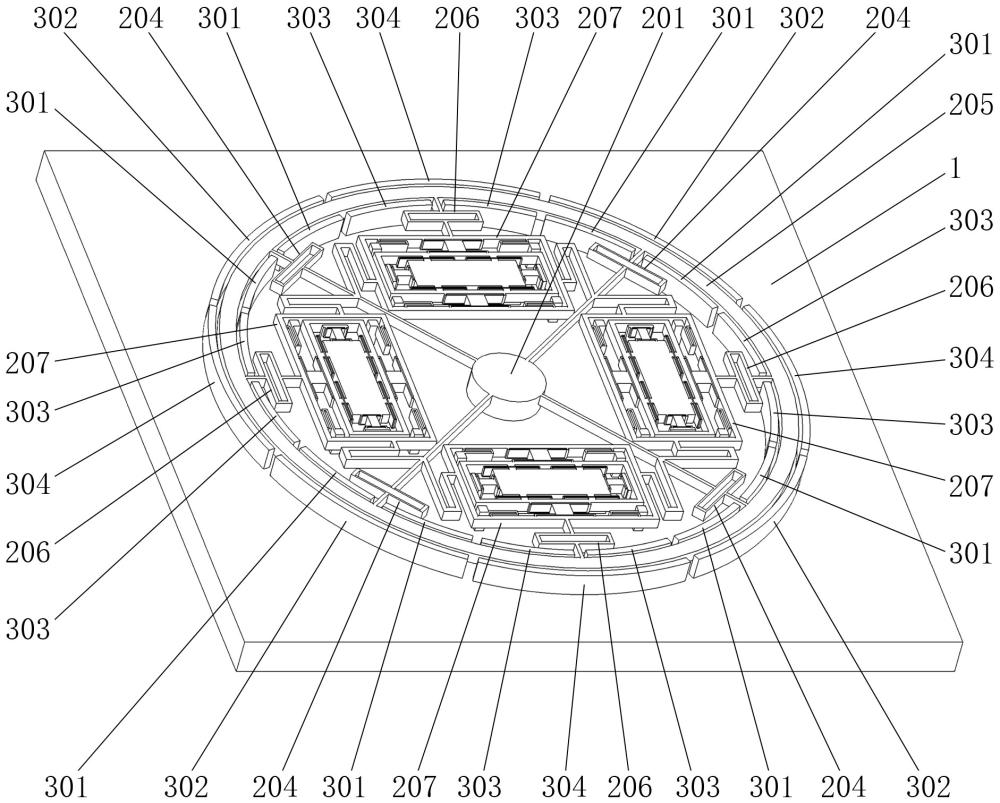
3、一种新型三轴硅微陀螺仪,包括玻璃衬底、谐振子部分、电极部分;
4、所述谐振子部分包括圆柱形中心锚点、四组方块形锚点a、四对方块形锚点b;
5、圆柱形中心锚点、四组方块形锚点a、四对方块形锚点b均键合于玻璃衬底的上表面;
6、每组方块形锚点a均包括四个呈矩形阵列排布的方块形锚点a;四组方块形锚点a围绕圆柱形中心锚点的中心线对称分布;
7、每对方块形锚点b均包括两个沿切向对称分布的方块形锚点b;四对方块形锚点b围绕圆柱形中心锚点的中心线对称分布;
8、圆柱形中心锚点的侧面连接有四根中字形耦合梁a;四根中字形耦合梁a围绕圆柱形中心锚点的中心线对称分布;
9、四根中字形耦合梁a的端部共同连接有圆环形框架;
10、圆环形框架的内侧面连接有四根中字形耦合梁b;四根中字形耦合梁b围绕圆柱形中心锚点的中心线对称分布,且四根中字形耦合梁b和四根中字形耦合梁a围绕圆柱形中心锚点的中心线等距交错排列;
11、每根中字形耦合梁b的端部均连接有一个矩形外层框架;四个矩形外层框架围绕圆柱形中心锚点的中心线对称分布,且四个矩形外层框架和四根中字形耦合梁a围绕圆柱形中心锚点的中心线等距交错排列;
12、每个矩形外层框架与对应的两根中字形耦合梁a之间均连接有两根沿切向对称分布的u形耦合梁a,且两根u形耦合梁a为一对;四对u形耦合梁a围绕圆柱形中心锚点的中心线对称分布;
13、每个矩形外层框架的内侧面均连接有四根呈矩形阵列排布的u形耦合梁b,且四根u形耦合梁b为一组;四组u形耦合梁b围绕圆柱形中心锚点的中心线对称分布,且四组u形耦合梁b的端部一一对应地连接于四组方块形锚点a的侧面;
14、每个矩形外层框架的内侧面均连接有两根沿径向对称分布的h形耦合梁a,且两根h形耦合梁a为一对;四对h形耦合梁a围绕圆柱形中心锚点的中心线对称分布;
15、每对h形耦合梁a的端部均共同连接有一个矩形内层框架;四个矩形内层框架围绕圆柱形中心锚点的中心线对称分布,且四个矩形内层框架和四根中字形耦合梁a围绕圆柱形中心锚点的中心线等距交错排列;
16、每个矩形内层框架的内侧面均连接有四根呈矩形阵列排布的中字形耦合梁c,且四根中字形耦合梁c为一组;四组中字形耦合梁c围绕圆柱形中心锚点的中心线对称分布;
17、每组中字形耦合梁c的端部均共同连接有一个矩形质量块;四个矩形质量块围绕圆柱形中心锚点的中心线对称分布,且四个矩形质量块和四根中字形耦合梁a围绕圆柱形中心锚点的中心线等距交错排列;
18、每个矩形质量块的侧面均连接有两根沿切向对称分布的h形耦合梁b,且两根h形耦合梁b为一对;四对h形耦合梁b围绕圆柱形中心锚点的中心线对称分布,且四对h形耦合梁b的端部一一对应地连接于四对方块形锚点b的侧面;
19、所述电极部分包括四对弧形电极a、四个弧形电极b、四对弧形电极c、四个弧形电极d、四个矩形电极;
20、四对弧形电极a、四个弧形电极b、四对弧形电极c、四个弧形电极d均键合于玻璃衬底的上表面;四个矩形电极均溅射于玻璃衬底的上表面;
21、四对弧形电极a一一对应地对称分布于四根中字形耦合梁a的两侧,且四对弧形电极a的外侧面与圆环形框架的内侧面共同构成四对微电容器a;四对微电容器a围绕圆柱形中心锚点的中心线对称分布;
22、四个弧形电极b的中点位置与四根中字形耦合梁a一一正对,且四个弧形电极b的内侧面与圆环形框架的外侧面共同构成四个微电容器b;四个微电容器b围绕圆柱形中心锚点的中心线对称分布;
23、四对弧形电极c一一对应地对称分布于四根中字形耦合梁b的两侧,且四对弧形电极c的外侧面与圆环形框架的内侧面共同构成四对微电容器c;四对微电容器c围绕圆柱形中心锚点的中心线对称分布;
24、四个弧形电极d的中点位置与四根中字形耦合梁b一一正对,且四个弧形电极d的内侧面与圆环形框架的外侧面共同构成四个微电容器d;四个微电容器d围绕圆柱形中心锚点的中心线对称分布;
25、四个矩形电极一一对应地同轴设置于四个矩形质量块的下方,且四个矩形电极的边长一一对应地小于四个矩形质量块的边长;四个矩形电极的上表面与四个矩形质量块的下表面一一对应地构成四个微电容器e;四个微电容器e围绕圆柱形中心锚点的中心线对称分布。
26、工作时,四对弧形电极a、四个弧形电极b均作为z轴检测电极。四对微电容器a、四个微电容器b均作为z轴检测电容。第一对弧形电极c、第三对弧形电极c、第一个弧形电极d、第三个弧形电极d均作为驱动模态激励电极。第一对微电容器c、第三对微电容器c、第一个微电容器d、第三个微电容器d均作为驱动模态激励电容。第二对弧形电极c、第四对弧形电极c、第二个弧形电极d、第四个弧形电极d均作为驱动模态反馈电极。第二对微电容器c、第四对微电容器c、第二个微电容器d、第四个微电容器d均作为驱动模态反馈电容。第一个矩形质量块、第三个矩形质量块均作为x轴检测质量块。第一个矩形电极、第三个矩形电极均作为x轴检测电极。第一个微电容器e、第三个微电容器e均作为x轴检测电容。第二个矩形质量块、第四个矩形质量块均作为y轴检测质量块。第二个矩形电极、第四个矩形电极均作为y轴检测电极。第二个微电容器e、第四个微电容器e均作为y轴检测电容。十二个z轴检测电极、六个驱动模态激励电极、六个驱动模态反馈电极、两个x轴检测电极、两个y轴检测电极均通过金属导线与控制系统连接。
27、具体工作过程如下:控制系统产生一路驱动电压信号,该路驱动电压信号通过金属导线传输至六个驱动模态激励电容,使得圆环形框架在静电力的作用下维持环向波数为2的四波腹振动。在振动过程中,控制系统通过六个驱动模态反馈电容实时测量圆环形框架的位移,并根据测量结果实时控制驱动电压信号,由此一方面使得圆环形框架的位移幅值保持恒定,另一方面使得圆环形框架在其谐振频率点上振动。当没有角速度输入时,圆环形框架在六个驱动模态激励电容的激励下,以驱动模态作面内四波腹弯曲振动。此时,两个x轴检测质量块、两个x轴检测电极、两个y轴检测质量块、两个y轴检测电极位于四波腹弯曲振动的波腹处,十二个z轴检测电极位于四波腹弯曲振动的波节处,两个x轴检测电容的极板间距、两个y轴检测电容的极板间距、十二个z轴检测电容的极板间距均保持不变,两个x轴检测电容的容量、两个y轴检测电容的容量、十二个z轴检测电容的容量均保持不变。此时,本发明的输出为零。当x轴方向上有角速度输入时,圆环形框架仍然以驱动模态作面内四波腹弯曲振动,两个x轴检测质量块、两个x轴检测电极、两个y轴检测质量块、两个y轴检测电极仍然位于四波腹弯曲振动的波腹处,十二个z轴检测电极仍然位于四波腹弯曲振动的波节处,但两个x轴检测质量块会同时作面外运动(二者的运动方向相反),使得两个x轴检测电容的极板间距发生变化,由此使得两个x轴检测电容的容量发生变化。此时,控制系统通过检测两个x轴检测电容的容量,即可解算出x轴方向上的角速度输入。当y轴方向上有角速度输入时,圆环形框架仍然以驱动模态作面内四波腹弯曲振动,两个x轴检测质量块、两个x轴检测电极、两个y轴检测质量块、两个y轴检测电极仍然位于四波腹弯曲振动的波腹处,十二个z轴检测电极仍然位于四波腹弯曲振动的波节处,但两个y轴检测质量块会同时作面外运动(二者的运动方向相反),使得两个y轴检测电容的极板间距发生变化,由此使得两个y轴检测电容的容量发生变化。此时,控制系统通过检测两个y轴检测电容的容量,即可解算出y轴方向上的角速度输入。当z轴方向上有角速度输入时,圆环形框架在哥氏力耦合作用下,以检测模态作面内四波腹弯曲振动。此时,两个x轴检测质量块、两个x轴检测电极、两个y轴检测质量块、两个y轴检测电极位于四波腹弯曲振动的波节处,十二个z轴检测电极位于四波腹弯曲振动的波腹处,使得十二个z轴检测电容的极板间距发生变化,由此使得十二个z轴检测电容的容量发生变化。此时,控制系统通过检测十二个z轴检测电容的容量,即可解算出z轴方向上的角速度输入。
28、基于上述过程,与现有三轴陀螺仪相比,本发明所述的一种新型三轴硅微陀螺仪通过采用全新结构,实现了同时测量x轴、y轴、z轴方向上的角速度输入,由此具备了如下优点:一、与现有组装式三轴陀螺仪相比,本发明采用了单片集成式结构,因此其不再受组装工艺所限,由此有效提高了测量精度。二、与现有单片集成式三轴陀螺仪相比,本发明具备了如下优点:其一,本发明实现了各驱动、检测方向的完全解耦,由此有效减小了各模态之间的耦合误差,从而有效提高了测量精度。其二,本发明的结构和加工工艺更简单,因此其能够实现大批量生产,由此有效降低了生产成本。
29、本发明结构合理、设计巧妙,有效解决了现有三轴陀螺仪测量精度低、生产成本高的问题,适用于军事导航、深空探测等高精尖领域。
- 还没有人留言评论。精彩留言会获得点赞!