工业级伺服系统的制作方法
本发明涉及伺服控制,具体涉及一种工业级伺服系统。
背景技术:
1、伺服控制系统是一种自动控制系统,通常用于控制电机和其他执行机构。它通过传感器检测物理量的变化,再经过计算和控制,使输出信号与输入信号达到期望值,从而实现对执行机构运动状态的精密控制。伺服控制系统根据控制方式的不同可以分为位置控制、速度控制和扭矩控制。其中位置控制是指控制系统控制执行机构实现到达目标位置的过程;速度控制是指控制系统控制执行机构实现运动速度的精密控制;扭矩控制则是指控制系统控制执行机构输出扭矩的大小和方向。随着制造业升级,各下游行业对精益制造装备需求日益提升。精益装备需对位移、速度、力矩等运动要素进行精密控制,这些都需要通过工业级伺服系统来实现。
2、在伺服控制系统中,编码器的精度直接影响到系统的速度控制和定位精度。目前,光电编码器的应用较为广泛,将其安装在转轴上,可将角度信息通过线缆传输到控制器。但是,光电编码器还存在一些难以克服的缺点,如光电编码器的码盘采用玻璃材质,并在玻璃上沉积很薄的刻线,其热稳定性及精度虽然可以满足测量要求,但是光电编码器抗震动和抗冲击能力不高,不适合用于尘埃、结露等恶劣环境,并且其结构与定位组装复杂。在生产中还必须要保证很高的装配精度,这直接影响到生产效率,最终影响产品的成本。
3、为了克服上述编码器的不足,出现了用于伺服控制系统的单对极或内外环多对极的磁电式编码器。此种编码器包括磁体、磁感应元件和信号处理电路。磁体随着伺服电机轴旋转,产生变化的磁场。磁感应元件感应到该变化的磁场,将磁信号转变成电信号输出到信号处理电路。信号处理电路将该电信号处理成角度信号输出。
4、随着精益装备控制精度的提升,其对磁电式编码器的分辨率要求也越来越高。为了增加编码器的分辨率,通常会增加磁极对的数量,但是在实际应用过程中,当内外环多对极磁电编码器的磁极对数增加到一定数量时,一方面,加工的单个磁极对的厚度将锐减成1mm之内,不仅不利于磁极对的粘接,而且还会造成多对极磁体在粘结的过程中易碎易断的问题;另一方面,由于误差及噪声的影响,磁敏元件采集的检测信号将在某一角度区间内完全重合,这将导致无法获取磁电编码器的绝对角度,也就无法实现伺服控制系统精密控制的要求。
技术实现思路
1、鉴于此,本发明的目的在于提供一种工业级伺服系统,旨在克服因极对数的增加导致多对极磁体制作困难的缺陷,同时解决因极对数的增加导致磁敏元件采集的检测信号在某一区间内完全重合,造成伺服控制系统精度无法提高的问题。
2、为了达到上述发明目的,本发明采取的技术方案如下:
3、本发明提供的工业级伺服系统,包括伺服电机;
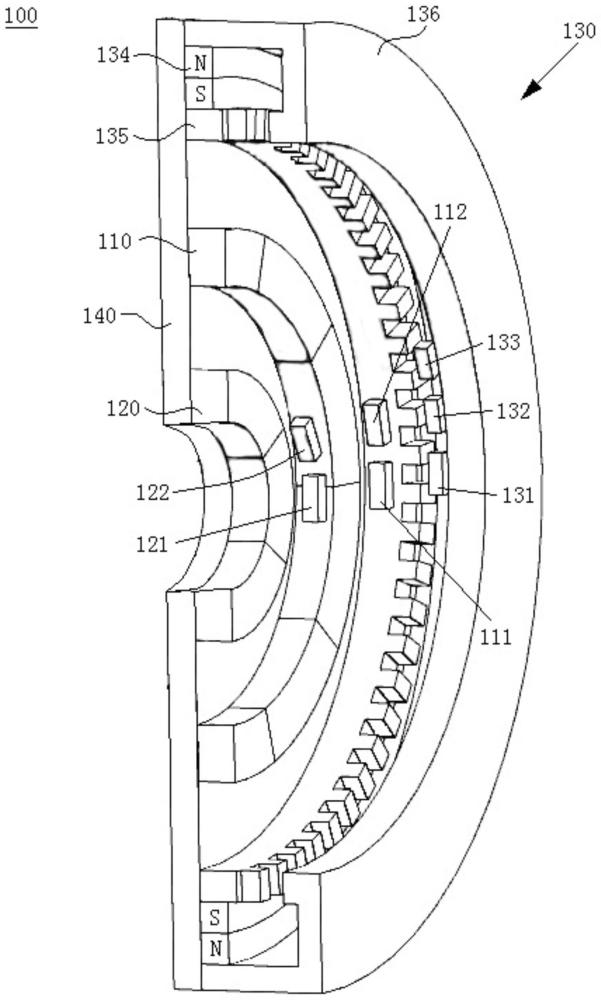
4、多对极磁电编码器,与所述伺服电机同轴设置并根据伺服电机的转速范围输出对应于该转速范围下的高精度和/或超高精度的绝对角度,其中,所述多对极磁电编码器包括同轴径向环形设置的第二多对极磁体、第一多对极磁体以及单对极导磁体组合件和电路板,其中,所述第一多对极磁体包括m对磁极且3≤m<23,所述第二多对极磁体包括n对磁极且3≤n<23,m大于n且为彼此互质的自然数,所述单对极导磁体组合件包括同轴线径向依次紧密贴合安装的第一环形导磁体、单对极环形磁体和第二环形导磁体,其中,所述第一环形导磁体在其一个轴向端面上开设有齿形部,所述第二环形导磁体具有一个与该齿形部完全相对立的平滑部,齿形部与平滑部形成一个环形的开口区域,在此结构下,所述单对极导磁体组合件实现在其径向截面上整体形状趋于闭合,其中,所述开口区域的开口方向与单对极环形磁体的径向方向相一致,并在其齿形部上开有p个齿且p≥100;此外,所述电路板上包括有:
5、第一组霍尔元件,包括第一线性霍尔传感器和第二线性霍尔传感器,与所述第一多对极磁体相邻设置,并根据第一多对极磁体的磁极信号输出第一组检测信号;
6、第二组霍尔元件,包括第三线性霍尔传感器和第四线性霍尔传感器,与所述第二多对极磁体相邻设置,并根据第二多对极磁体的磁极信号输出第二组检测信号;
7、第三组霍尔元件,包括第五线性霍尔传感器、第六线性霍尔传感器和第七线性霍尔传感器,且设于所述齿形部与所述平滑部之间,并根据单对极导磁体组合件的磁极信号输出修正的第三组检测信号;
8、伺服控制器,包括一控制单元和一电流传感器,所述控制单元接收多对极磁电编码器反馈的伺服电机轴角度信息以及接收电流传感器采集的电流信号,经过处理后由伺服控制器发出控制伺服电机的工作指令;
9、伺服驱动器,接收所述伺服控制器发出的控制指令并根据伺服电机的负载要求,输出伺服电机的驱动信号;
10、执行机构,与所述伺服电机相连,由伺服电机驱动执行机构实现对其运动状态的精密控制。
11、进一步的,所述多对极磁电编码器通过以下公式来选择输出伺服电机转速范围下的高精度和/或超高精度的绝对角度:
12、
13、
14、
15、式中,θ3为多对极磁电编码器输出的最终绝对角度;θ1为由第一多对极磁体和第二多对极磁体所确定高精度绝对角度;θ2为利用所获得的高精度绝对角度θ1结合单对极导磁体组合件所确定的超高精度绝对角度;ω为伺服电机当前的转速;ω0为多对极磁电编码器输出超高精度绝对角度时所允许的最高转速的0.8倍;ω1为多对极磁电编码器输出超高精度绝对角度时所允许的最高转速的1.2倍;t表示控制指令的控制周期,k表示第k个控制周期。
16、进一步的,所述伺服电机为永磁同步伺服电动机。
17、再进一步的,m和n为质数且mn<23×19。
18、更近一步的,所述第一组检测信号包括:第一线性霍尔传感器、第二线性霍尔传感器根据第一多对极磁体的磁极信号输出的第一检测信号与第二检测信号;所述第一检测信号与第二检测信号的相位相差90度;
19、所述第二组检测信号包括:第三线性霍尔传感器、第四线性霍尔传感器根据第二多对极磁体的磁极信号输出的第三检测信号与第四检测信号;所述第三检测信号与第四检测信号的相位相差90度。
20、更近一步的,所述修正的第三组检测信号包括:第五线性霍尔传感器、第六线性霍尔传感器和第七线性霍尔传感器根据单对极导磁体组合件的磁极信号输出的d轴、q轴的检测信号;其中,第五线性霍尔传感器、第六线性霍尔传感器和第七线性霍尔传感器对单对极导磁体组合件的磁极信号采集后获得相位相差120度的原始三相霍尔信号,所述原始三相霍尔信号为第五检测信号,第六检测信号和第七检测信号;然后对获得的原始三相霍尔信号作零点漂移的处理后输出相位相差90度的d轴、q轴的检测信号。
21、优选地,所述第一线性霍尔传感器与第三线性霍尔传感器以及第五线性霍尔传感器在一端对齐。
22、较佳地,所述单对极导磁体组合件位于最外环,第二多对极磁体位于最内环,第一多对极磁体介于单对极导磁体组合件与第二多对极磁体之间且第一多对极磁体与第二多对极磁体的起始磁极安装位置存在角度差。
23、优选地,所述第一多对极磁体、第二多对极磁体的磁化方向与伺服电机转轴的径向或轴向一致;所述单对极导磁体组合件的磁化方向与伺服电机转轴的径向或轴向一致。
24、较佳地,所述执行机构为丝杆、导轨、减速机、二维转台、数控操作平台中的任意一种。
25、本发明的有益效果:本发明将单对极导磁体组合件中的第一环形导磁体的一轴向端面设置成齿形部,第二环形导磁体上设置一与齿形部完全对立的平滑部,并保持两者之间留有开口的情形下,当单对极导磁体组合件同轴旋转一周,利用霍尔元件采集到的检测信号中的周期数量与齿形部的齿数一一对应,即齿形部具有p个齿将获得含有p个周期的检测信号,这正好与p个极对数的多对极磁体利用霍尔元件采集的检测信号完全吻合。此时,可将单对极导磁体组合件相当于一个具有极对数为p的多对极磁体。
26、此外,本发明提供的工业级伺服系统中采用的多对极磁电编码器是在原有内外环多对极磁体的径向最外圈增设一个磁极对数要远远大于内外环磁极对数的多对极磁体,由于极对数的增加,将导致多对极磁体中磁极对的难以制作和难以粘结的问题,本发明采用单对极导磁体组合件可完美避开这一缺陷,即采用机加工的方式可容易在第一环形导磁体上加工出具有p个齿的齿形部,这样就实现了最外环多对极磁体极对数的大幅增加,利用原有内外环多对极磁体获取的具有一定精度的机械角度来标定最外环多对极磁体的实际旋转角度,从而大幅度提高磁电编码器的测量精度,相应地也就大幅提升了伺服系统的定位精度和角度控制精度。本发明提供的工业级伺服系统尤其适用于大中型伺服系统角度检测及位置检测的工况场景。
- 还没有人留言评论。精彩留言会获得点赞!