一种宽带雷达多模态运动目标相参积累检测方法及装置
本发明属于雷达信号处理,具体涉及一种宽带雷达多模态运动目标相参积累检测方法及装置。
背景技术:
1、目前,相比窄带雷达,宽带雷达具有距离分辨率更高、目标起伏更小、单元杂波更小、隐蔽性以及有源抗干扰能力更强等优势。
2、现阶段,在宽带雷达中,目标能量分散在不同的距离单元内,使得单个距离单元的信噪比变低,不利于检测。现有技术通常采用雷达对目标进行长时间凝视探测,以时间换取能量,对回波进行长时间积累是一种有效的提高信噪比的方式。但是,在对目标做长时间积累的过程中,变加速运动目标具有较强的机动性。这种速度的强机动性使得宽带雷达的回波中出现严重的距离徙动和多普勒频率徙动,能量分散在不同的单元内,运动参数估计需要高维搜索,计算复杂度高,目标回波信噪比低,无法实现微弱目标的有效检测。
技术实现思路
1、为此,本发明提供一种宽带雷达多模态运动目标相参积累检测方法及装置,能够避免对参数的高维搜索,有效提升目标回波信噪比,以实现微弱目标的有效检测。
2、为了实现上述目的,本发明提供如下技术方案:一种宽带雷达多模态运动目标相参积累检测方法,包括:
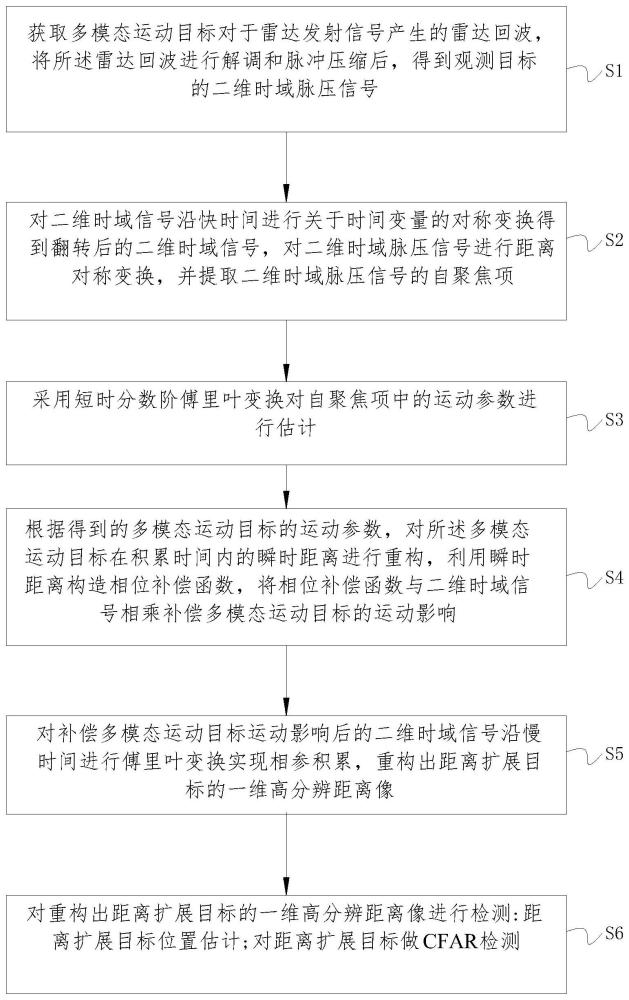
3、获取多模态运动目标对于雷达发射信号产生的雷达回波,将所述雷达回波进行解调和脉冲压缩后,得到观测目标的二维时域脉压信号;
4、对二维时域信号沿快时间进行关于时间变量的对称变换得到翻转后的二维时域信号,对二维时域脉压信号进行距离对称变换,并提取二维时域脉压信号的自聚焦项;
5、采用短时分数阶傅里叶变换对自聚焦项中的运动参数进行估计;根据得到的多模态运动目标的运动参数,对所述多模态运动目标在积累时间内的瞬时距离进行重构,利用瞬时距离构造相位补偿函数,将相位补偿函数与二维时域信号相乘补偿多模态运动目标的运动影响;
6、对补偿多模态运动目标运动影响后的二维时域信号沿慢时间进行傅里叶变换实现相参积累,重构出距离扩展目标的一维高分辨距离像。
7、作为宽带雷达多模态运动目标相参积累检测方法优选方案,雷达发射信号p(t)的表达式为:
8、
9、式中,fc表示载频,t表示时间变量,表示距离向快时间变量,tm为方位向慢时间变量,tp表示发射信号的脉冲宽度,为p(t)的窗函数,j为虚数单位,μ表示雷达发射信号的调频率;
10、第q个散射点在第i个运动模态内至雷达的瞬时距离表示为:
11、
12、式中,为第q个散射点在第i个运动模态中至雷达的初始距离,也是第q个散射点在第i个运动模态中当tm等于ti-1时至雷达的初始距离;vi为第q个散射点在第i个运动模态中的初始速度,ai为第q个散射点在第i个运动模态中的加速度,tm=m/fr,m为脉冲编号,m为大于或等于0且小于或等于m-1的整数,m表示积累脉冲数,m为大于或等于1的整数,fr为脉冲重复频率,ti-1为第i个运动模态的起始时间,ti为第i个运动模态的结束时间,即tm∈[ti-1,ti],q为大于或等于1且小于或等于q的整数,i为大于或等于1且小于或等于w的整数,w为大于或等于2的整数;
13、相邻运动模态之间的参数关系为:
14、v(i'+1)=vi'+ai'(ti'-t(i'-1))
15、
16、式中,i`为大于或等于1,且小于或等于w-1的整数;v(i'+1)为第q个散射点在第i`+1个运动模态中的初始速度,vi'为第q个散射点在第i`个运动模态中的初始速度,ai'为第q个散射点在第i`个运动模态中的加速度,ti'为第i`个运动模态的结束时间,t(i'-1)为第i`-1个运动模态的结束时间;为第q个散射点在第i`+1个运动模态中至雷达的初始距离。
17、作为宽带雷达多模态运动目标相参积累检测方法优选方案,任意的第q个散射点在第i个运动模态的二维时域信号表示为:
18、
19、式中,为的信号幅度,c为光速,j为虚数单位;对沿距离向做傅里叶变换,得到第q个散射点在第i个运动模态的距离频域-方位时域信号为:
20、
21、式中,表示的信号幅度,f为距离向快时间对应的频率变量,b=μtp,b为带宽;
22、在整个相参处理时间内多模态运动目标回波的二维时域信号表示为:
23、
24、在整个相参处理时间内多模态运动目标回波的距离频域-方位时域信号s(f,tm)表示为:
25、
26、式中,tm∈[t0,tm],取t0=0,tm=(m-1)/fr,ηi(tm)为第i个运动模态的持续时间;
27、将的窗函数ηi(tm)写入到二维时域信号的指数项的距离中,将s(f,tm)中的窗函数ηi(tm)写入到距离频域-方位时域信号s(f,tm)的指数项的距离中。
28、作为宽带雷达多模态运动目标相参积累检测方法优选方案,对二维时域信号沿快时间做关于的对称变换,得到翻转后的信号与的关系为:
29、
30、式中,为对称变换后的快时间变量,对信号沿快时间做傅里叶变换得到信号根据傅里叶变换的性质,与s(f,tm)之间的关系为:
31、
32、将与s(f,tm)相乘得到:
33、
34、相乘结果sr(f,tm)由自聚焦项sr-self(f,tm)和交叉项sr-other(f,tm)两部分组成,
35、将sr(f,tm)沿f轴做傅里叶逆变换得到:
36、
37、式中,是自聚焦项sr-self(f,tm)的时域表示,是交叉项sr-other(f,tm)的时域表示;
38、取自聚焦项进行参数估计,即取中单元内的信号用于参数估计,得到提取信号sre(tm):
39、
40、作为宽带雷达多模态运动目标相参积累检测方法优选方案,采用短时分数阶傅里叶变换对自聚焦项中的运动参数进行估计包括:
41、获得目标运动的模态数,先用长度为m1的矩形滑窗将长度m的lfm信号分成m2个等长的lfm信号,m2=fix(m/m1),fix(·)表示向0取整操作,第n段的矩形滑窗表示为:
42、
43、式中,tn=m1/fr为长度为m1的矩形窗的持续时间;
44、根据峰值位置,可以得到第n段lfm信号的运动参数为:
45、
46、式中,λ=c/fc为波长,为分数阶傅里叶域频率,为分数阶傅里叶变换角度;
47、在m2个加速度中获得w-1个初始的转换时刻,即目标在观测时间内有w个运动模态,并记第w个模态的起始和结束时间分别为tw-1和tw,持续时间为tw,w=tw-tw-1;
48、进行运动参数估计还包括:
49、利用获得的w-1个转换时刻重新对lfm信号sre(tm)做截断处理,第w个窗函数的表达式为:
50、
51、对w个短的lfm信号做短时分数阶傅里叶变换,得到二次估计的速度和加速度,并记第w段lfm信号估计出的速度和加速度分别为和
52、进行运动参数估计还包括:
53、根据获得的w组运动参数和得到每一个模态在整个cpi的瞬时速度值,有:
54、
55、式中,va=-frλ/4为盲速,na为模糊数。
56、作为宽带雷达多模态运动目标相参积累检测方法优选方案,根据瞬时距离,构造相位补偿函数h(f,tm)为:
57、
58、将相位补偿函数h(f,tm)与距离频域-方位时域信号s(f,tm)相乘,补偿目标运动的影响,得到:
59、
60、沿f轴做ift变到二维时域,得到:
61、
62、式中,aif表示ift过程中幅度的变化量。
63、作为宽带雷达多模态运动目标相参积累检测方法优选方案,对补偿多模态运动目标运动影响后的二维时域信号沿慢时间进行傅里叶变换实现相参积累结果为:
64、
65、式中,af2为沿慢时间做傅里叶变换的幅度积累增益,fd为对应tm的多普勒频率,tcpi=m/fr为相参积累时间;
66、重构出距离扩展目标的一维高分辨距离像为:
67、
68、作为宽带雷达多模态运动目标相参积累检测方法优选方案,还包括对重构出距离扩展目标的一维高分辨距离像进行检测,检测步骤包括:
69、距离扩展目标位置估计:估计目标尺寸;确定目标散射中心的位置;估计目标占据的距离单元数;
70、对距离扩展目标做cfar检测:估计待检单元的噪声方差;距离扩展目标的能量积累与cfar检测。
71、本发明还提供一种宽带雷达多模态运动目标相参积累检测方法,采用上述的一种宽带雷达多模态运动目标相参积累检测方法,包括:
72、雷达回波获取模块,用于获取多模态运动目标对于雷达发射信号产生的雷达回波;
73、雷达回波处理模块,用于将所述雷达回波进行解调和脉冲压缩后,得到观测目标的二维时域脉压信号;
74、信号翻转模块,用于对二维时域信号沿快时间进行关于时间变量的对称变换得到翻转后的二维时域信号;
75、信号傅里叶变换模块,用于对二维时域脉压信号进行距离对称变换,并提取二维时域脉压信号的自聚焦项;
76、运动参数估计模块,用于采用短时分数阶傅里叶变换对自聚焦项中的运动参数进行估计;
77、瞬时距离重构模块,用于根据得到的多模态运动目标的运动参数,对所述多模态运动目标在积累时间内的瞬时距离进行重构
78、相位补偿模块,用于利用瞬时距离构造相位补偿函数,将相位补偿函数与二维时域信号相乘补偿多模态运动目标的运动影响;
79、目标重构模块,用于对补偿多模态运动目标运动影响后的二维时域信号沿慢时间进行傅里叶变换实现相参积累,重构出距离扩展目标的一维高分辨距离像。
80、作为宽带雷达多模态运动目标相参积累检测装置优选方案,还包括:
81、重构目标检测模块,用于对重构出距离扩展目标的一维高分辨距离像进行检测,重构目标检测模块包括:
82、目标位置估计子模块,用于距离扩展目标位置估计:估计目标尺寸;确定目标散射中心的位置;估计目标占据的距离单元数;
83、cfar检测子模块,用于对距离扩展目标做cfar检测:估计待检单元的噪声方差;距离扩展目标的能量积累与cfar检测。
84、本发明具有如下优点:通过获取多模态运动目标对于雷达发射信号产生的雷达回波,将所述雷达回波进行解调和脉冲压缩后,得到观测目标的二维时域脉压信号;对二维时域信号沿快时间进行关于时间变量的对称变换得到翻转后的二维时域信号,对二维时域脉压信号进行距离对称变换,并提取二维时域脉压信号的自聚焦项;采用短时分数阶傅里叶变换对自聚焦项中的运动参数进行估计;根据得到的多模态运动目标的运动参数,对所述多模态运动目标在积累时间内的瞬时距离进行重构,利用瞬时距离构造相位补偿函数,将相位补偿函数与二维时域信号相乘补偿多模态运动目标的运动影响;对补偿多模态运动目标运动影响后的二维时域信号沿慢时间进行傅里叶变换实现相参积累,重构出距离扩展目标的一维高分辨距离像。本发明实现了宽带雷达变加速运动目标的距离徙动和多普勒频率徙动校正,避免了高维搜索,计算复杂度低,有利于工程应用;本发明可以有效改善宽带雷达的回波信噪比,有利于改善对机动目标的检测能力,能够实现微弱目标的有效检测。
- 还没有人留言评论。精彩留言会获得点赞!