一种位置与压力识别传感器及其制作方法
本发明涉及一种位置与压力识别传感器及其制作方法。
背景技术:
1、人体皮肤组织内部包含不同的感受单元,包括位置感受器、压力感受器、应变感受器、温度感受器等,是人体感受外界刺激的关键原因。相应地,仿生传感器通过模仿人体皮肤组织的各类感受器而具备连续监测外界刺激的能力。但是目前大多数仿生传感器只能实现对单一物理量或者单一传感机制的识别,严重限制了其应用的发展。例如:在机器人应用中,如果只能感知位置而不能感知压力,则会造成机器人无法调整对外界物体施加的力度,可能导致施加力过度或者施加力欠缺。因此,制备具有感知多种功能的仿生传感器显得至关重要。在此基础上,位置与压力是人体皮肤中基础但关键的两个参数,若能够对其同时监测,将带来更为丰富的触觉反馈,为用户提供更逼真的真实体验。
2、目前存在的同时识别位置与压力的传感器,是将位置信号与压力信号混合成一种信号并通过单通道输出,由于这两种信号并不是两个独立的物理量,需要通过复杂的算法将位置与压力信号进行解耦,然而即使这样,也难免造成压力信号与位置信号的互相干扰从而影响了传感器的性能。
3、或者,中国发明专利申请公布号为cn110702276a、名称为一种位置压力传感器模组的专利申请,其包括压力传感器层、电容介质层、触控传感器层、玻璃基材、oca胶层、框胶、传感器接口电路。通过压力传感器测量待测点的压力,压力产生的形变致使电容介质层触发触控传感器电容值发生变化,测定测量点的位置。该专利申请虽然能同时测量位置及压力,但是其并未对压力传感器的具体结构以及触控传感器的具体结构进行描述,由此,压力传感器和触控传感器仅能采用常规的结构,其识别准确率、灵敏度均较低。且,该模组的结构较为复杂,成本较高。
技术实现思路
1、本发明提供了一种位置与压力识别传感器及其制作方法,其克服了背景技术所存在的不足。本发明解决其技术问题所采用的技术方案之一是:
2、一种位置与压力识别传感器,它包括位置识别模块和压力识别模块,其中:
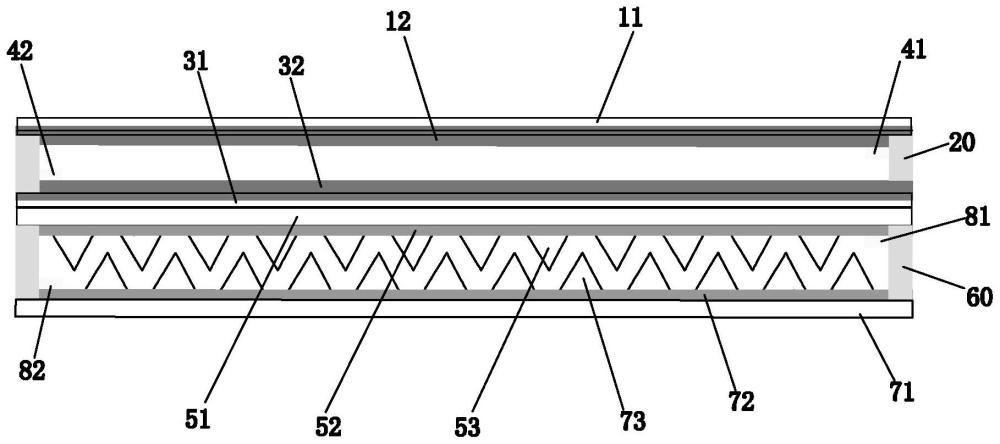
3、所述位置识别模块包括低电阻层、第一垫片和高电阻层,所述低电阻层包括第一柔性基底和低阻导电层,所述低阻导电层黏附在第一柔性基底的底面;所述高电阻层包括第二柔性基底和高阻导电层,所述高阻导电层黏附在第二柔性基底的顶面;所述第一垫片黏附在第一柔性基底底面、第二柔性基底顶面之间且低阻导电层和高阻导电层相对布置,所述第一垫片围绕在低阻导电层和高阻导电层的外围;且,所述低阻导电层和高阻导电层分别粘接有第一电极和第二电极;
4、所述压力识别模块包括第一压力敏感层、第二垫片和第二压力敏感层,所述第一压力敏感层包括第三柔性基底和第一导电敏感层,所述第三柔性基底底面设置有上部微结构,所述第一导电敏感层黏附在第三柔性基底底面且覆盖上部微结构;所述第二压力敏感层包括第四柔性基底和第二导电敏感层,所述第四柔性基底顶面设置有下部微结构,所述第二导电敏感层黏附在第四柔性基底顶面且覆盖下部微结构;所述第二垫片黏附在第三柔性基底底面、第四柔性基底顶面之间且第一导电敏感层与第二导电敏感层相对布置,所述第二垫片围绕在第一导电敏感层与第二导电敏感层的外围;且,所述第一导电敏感层和第二导电敏感层分别粘接有第三电极和第四电极;
5、所述第一柔性基底顶面和第四柔性基底底面分别进行固定,且所述第二柔性基底底面堆叠在第三柔性基底顶面;
6、在静止状态下,所述低阻导电层和高阻导电层互不接触,不产生导通路径;所述第一导电敏感层与第二导电敏感层互不接触,不产生导通路径;
7、按压第一柔性基底顶面,使得低阻导电层与高阻导电层发生接触,第一电极与第二电极之间形成导电通路,产生位置识别信号;且,第一导电敏感层与第二导电敏感层发生接触,第三电极与第四电极之间形成导电通路,产生压力识别信号。
8、一较佳实施例之中:所述低阻导电层采用低阻导电溶液滴入至第一柔性基底底面并烘干而形成的一层膜,该低阻导电溶液采用碳纳米管分散液与去离子水比例为1:0、并添加质量分数为5%的水性聚氨酯混合形成;所述高阻导电层采用高阻导电溶液滴入至第二柔性基底顶面并烘干而形成的一层膜,该高阻导电溶液采用碳纳米管分散液与去离子水比例为1:4、并添加质量分数为5%的水性聚氨酯混合形成。
9、一较佳实施例之中:所述第一柔性基底和第二柔性基底均采用pet、p i或者pen薄膜制成;所述第一垫片为双面胶带,且所述第一垫片的厚度为0.15毫米、0.3毫米或者0.45毫米。
10、一较佳实施例之中:所述上部微结构和下部微结构均包括若干个间隔布置的四棱锥体,且所述上部微结构的四棱锥体与下部微结构的四棱锥体呈上下错开布置。
11、一较佳实施例之中:通过3d打印机打印出与第三柔性基底与上部微结构相同且一体成型的第一模具,再将液态的二甲基硅氧烷与固化剂混合后形成的基底混合液倒入第一模具内制成带有上部微结构的第三柔性基底;通过3d打印机打印出与第四柔性基底与下部微结构相同且一体成型的第二模具,再将液态的二甲基硅氧烷与固化剂混合后形成的基底混合液倒入第二模具内制成带有下部微结构的第四柔性基底。
12、一较佳实施例之中:所述液态的二甲基硅氧烷与固化剂以质量比为8:1-12:1搅拌混合。
13、一较佳实施例之中:所述第二垫片为双面胶带,且所述第二垫片的厚度为0.15毫米、0.3毫米或者0.45毫米。
14、一较佳实施例之中:在第三柔性基底设置有上部微结构的一面滴入导电敏感溶液,待导电敏感溶液干燥后形成第一导电敏感层;在第四柔性基底设置有下部微结构的一面滴入导电敏感溶液,待导电敏感溶液干燥后形成第二导电敏感层;其中,所述导电敏感溶液采用碳纳米管分散液或石墨分散液或pedot分散液与去离子水按体积比为1:1进行配置,并加入占总质量5%的水性聚氨酯混合制成。
15、本发明解决其技术问题所采用的技术方案之二是:
16、一种位置与压力识别传感器的制作方法,其应用上述的一种位置与压力识别传感器,包括:
17、步骤10,将第一柔性基底和第二柔性基底进行清洗并固定,接着利用胶带在第一柔性基底底面以及第二柔性基底底面分别围出矩形形状,再将配置好的低阻导电溶液滴入第一柔性基底底面的矩形形状内,将配置好的高阻导电溶液滴入第二柔性基底顶面的矩形形状内,接着水平置于烘箱中进行干燥,干燥后在第一柔性基底底面形成低阻导电层,在第二柔性基底顶面形成高阻导电层;
18、步骤20,分别在低阻导电层的一端和高阻导电层的一端涂附导电银胶,再将第一电极粘贴在低阻导电层的导电银胶上,将第二电极粘贴在高阻导电层的导电银胶上;
19、步骤30,撕去步骤10中第一柔性基底底面和第二柔性基底顶面的胶带,接着将第一垫片的上下两面分别粘贴在第一柔性基底底面的胶带粘贴处和第二柔性基底顶面的胶带粘贴处,此时,第一垫片围绕在低阻导电层和高阻导电层的外围,低阻导电层和高阻导电层相对布置,便完成了位置识别模块的制作;
20、步骤40,用3d打印机打印出与第三柔性基底与上部微结构结构相同且一体成型的第一模具、以及与第四柔性基底与下部微结构结构相同且一体成型的第二模具,再将液态的二甲基硅氧烷与固化剂混合后形成的基底混合液倒入第一模具和第二模具内,以形成第三柔性基底与上部微结构以及第四柔性基底与下部微结构,接着放入真空箱中去除基底混合液中的气泡,再放入烘箱中烘干,得到带有上部微结构的第三柔性基底和带有下部微结构的第四柔性基底;
21、步骤50,将带有上部微结构的第三柔性基底和带有下部微结构的第四柔性基底放入等离子体机中处理,接着配置好导电敏感溶液,并通过移液枪将导电敏感溶液滴入至第三柔性基底底面以及上部微结构上,干燥后形成第一导电敏感层,再将导电敏感溶液滴入至第四柔性基底顶面以及下部微结构上,干燥后形成第二导电敏感层;
22、步骤60,分别在第一导电敏感层的一端和第二导电敏感层的一端涂附导电银胶,再将第三电极粘贴在第一导电敏感层的导电银胶上,将第四电极粘贴在第二导电敏感层的导电银胶上;
23、步骤70,将第二垫片的上下两面分别粘贴在第三柔性基底底面和第四柔性基底顶面,此时,第二垫片围绕在第一导电敏感层与第二导电敏感层的外围,第一导电敏感层与第二导电敏感层相对布置,便完成了压力识别模块的制作;
24、步骤80,将第一柔性基底顶面和第四柔性基底底面分别进行固定,且所述第二柔性基底底面堆叠在第三柔性基底顶面,便完成了位置与压力识别传感器的制作。
25、一较佳实施例之中:在步骤30中,第一垫片选择宽度为2-4毫米的双面胶,且呈矩形形状;在步骤70中,第二垫片选择宽度为2-4毫米的双面胶,且呈矩形形状。
26、本技术方案与背景技术相比,它具有如下优点:
27、该位置与压力识别传感器能同时检测位置与压力信号,不需要复杂的算法进行解耦并且位置与压力信号的性能互不干扰。且,结构简单,成本低,识别准确率高,真实位置与实际位置的拟合准确率达到95%以上,压力识别的灵敏度高,检测范围大,达到200kpa。
- 还没有人留言评论。精彩留言会获得点赞!