一种基于海床滑动过程原位观测设备的工作方法
本发明涉及海洋地质灾害观测领域,具体而言,特别涉及一种基于海床滑动过程原位观测设备的工作方法。
背景技术:
1、近年来,海洋资源开发和海洋工程建设不断推进,保障各种海洋结构物的安全稳定十分重要。在此背景下,海床滑动作为诱发结构物失稳的重要因素,愈发受到重视。海床滑动会引发管线悬空甚至断裂,或导致平台失稳甚至倾覆等问题,造成严重的生命财产损失与潜在的海洋环境灾难。研究海床滑动过程,对于解决海洋工程基础稳定性问题、预测地质灾害发生等均具有重要意义。
2、目前,应用于陆上的土体滑动观测技术在国内外已非常成熟,并广泛的应用于陆上工程领域,主要靠光纤、位移传感器来监测变形位移量。但在深海中海床滑动过程的观测技术难度较大,已成为当前海洋地质灾害研究的难点与热点。
技术实现思路
1、为了弥补现有技术的不足,本发明提供了一种基于海床滑动过程原位观测设备的工作方法,设备包括上部测量装置及下部固定装置,布放及回收采用辅助船水面脱钩释放及gps定位人工回收的方式,可实现海床滑动过程原位长期观测。
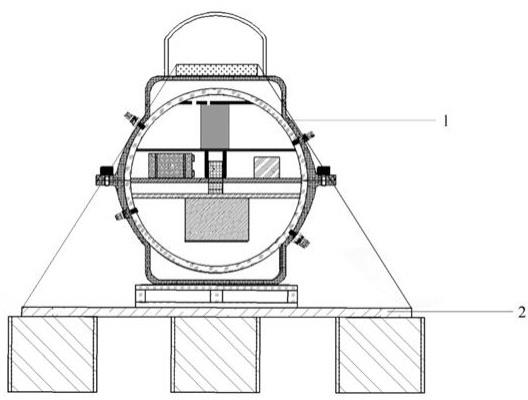
2、本发明是通过如下技术方案实现的:一种海床滑动过程原位观测设备,包括上部的测量装置及下部的固定装置,观测装置外部为外壳,内部为承压玻璃舱,承压玻璃舱的舱体中部安装有中部固定板与底部固定板,中部固定板的中部贯穿安装有高精度三轴加速度传感器,高精度三轴加速度传感器的上方设置有有压力传感器,底部固定板的下表面安装有采集存储控制系统,中部固定板的上表面安装有水声通讯装置和可充电电池组,外壳的顶部装有脱钩机构,承压玻璃舱外壁上设置有有采集存储控制系统预留接插件、水声通讯装置预留接插件、电池组预留接插件及熔断装置预留接插件;
3、固定装置包括安装板、配重支架和5个支脚,配重支架为正方形框架,配重支架的上表面中心位置固定安装安装板,安装板连接测量装置和固定装置,配重支架的下表面中心位置和四角均固定安装有支脚;
4、具体包括以下步骤:
5、s1、将测量装置和固定装置进行组装,使用pc端连接观测设备,输入采集频率与采集时长;
6、s2、利用辅助船的gps定位系统将辅助船开到目标点位,使用辅助船上的缆车将设备下放至海面,进行脱钩释放,设备通过自重下沉至海床表面,固定装置的支脚插入海床,使设备随海床进行移动;
7、s3、设备中的高精度三轴加速度传感器、压力传感器按照设定的采集频率与采集时长开始数据采集;
8、s4、原位观测结束之后,将辅助船开回目标点位,声通甲板单元发送释放指令,声通水下部分接收信号,将信号传输给控制单元,控制单元将指令传送给脱钩机构,脱钩机构工作,将保险丝熔断,设备与固定装置脱离,通过自身浮力上浮至水面;
9、s5、pc端通过水密接插件连接观测装置,读取海床滑动过程三轴加速度数据、压力数据,进行数据处理后得到海床滑动过程位移变化数据;
10、具体包括以下步骤:
11、s5-1、对加速度信号进行预处理:通过去除背景加速度、直流分量、低通滤波等预处理,得到预处理后的加速度信号;去除背景加速度、直流分量的方法为对加速度的原始信号通过matlab中的detrend函数去除;低通滤波则是首先通过matlab中的estimatenoise函数确定加速度信号的有效频率,然后通过matlab中的butter和filter函数设计低通滤波器来进行低通滤波;
12、s5-2、使用psd 估计法确定最优截止频率;采用welch 方法计算加速度信号的psd,对信号进行 psd 估计,选取最优截止频率;具体包括以下步骤:
13、对于信号 x(t),将其分成 n 个重叠的段,每个段的长度为 l,重叠的长度为m;则第n个段的起始时间为:
14、
15、第 n 个段的终止时间为:
16、
17、因此,第 n 个段的时间范围为:
18、
19、对于每个段,使用窗函数 w(t) 对其进行加窗处理;
20、再对每一段根据公式(1)进行快速傅里叶变换,并求得每个频率点的功率谱密度;将每个频率点的功率谱密度进行平均,得到整个信号的 psd;根据 psd 的结果,选取最优截止频率,通常选择频谱峰值对应的频率作为最优截止频率;
21、公式(1)
22、式中,表示频率域信号,表示信号在各个频率下的强度或振幅;表示信号在各个时间点的数值;表示角频率,表示信号变化的快慢;
23、s5-3、频域积分:将提取的截止频率应用到加速度频域积分过程中,通过一次积分得到速度信号,通过二次积分得到位移信号;然后用傅里叶反变换把它们变成时域信号;
24、s5-4、输出位移信号,得到位移数据;
25、s5-5、在对压力数据处理的过程根据公式(11)将其转换为高度数据得到h,取所有高度数据进行取平均值,再根据公式(12)从原始高度数据中减去平均值即可得到高度变化,其中p为压强,ρ为海水密度,g为观测点的重力加速度,h为压力传感器与海水面之间的距离;
26、𝑃= ρgh公式(11)
27、 公式(12)
28、s5-6、对高度变化数据根据公式(1)进行快速傅里叶变换,根据傅里叶变换得到的频谱图,确定起始频率,利用低通滤波器进行潮汐校正去除潮汐信号的干扰,将获得的数据减去利用加速度传感器采集计算的位移变化进行波浪校正;
29、s5-7、对潮汐和波浪校正后的数据根据公式(13)进行拟合,并从原数据中减去拟合得到的漂移值,得到校正后海底高度变化曲线,即位移结果。
30、𝑃(𝑡) = 𝐴1exp(−𝐴2𝑡) + 𝐴3𝑡+ 𝐴4公式(13)
31、其中𝐴𝑖是由非线性拟合确定的自由参数,𝑡为时间,𝑃(𝑡)为𝑡时刻对应的压强。
32、作为优选方案,承压玻璃舱(12)的最大耐压深度为6000米。
33、作为优选方案,可充电电池组(18)为锂亚电池,电压7.2 v,容量236 ah。
34、作为优选方案,外壳(11)为abs工程塑料。
35、作为优选方案,固定装置(2)的材质为316l钢材。
36、作为优选方案,步骤s5-3具体包括以下步骤:根据速度的定义,速度等于位移除以时间;假设在时间间隔 δt 内,位移为 δx,则速度为:
37、公式(2)
38、时间间隔 δt 可以表示为两个连续时刻i−1和i之间的间隔,即。因此,位移δx可以表示为:
39、公式(3)
40、将上述两个公式代入速度的式(2)中,得到:
41、 公式(4)
42、时间间隔内的加速度可以表示为 ,即加速度等于速度的变化率。将其代入速度的定义式中,得到:
43、 公式(5)
44、因为时间间隔 δt 是一个固定的值,将其代入式(5)中,并整理得到最终的公式:
45、 公式(6)
46、其中,f 是时间间隔 δt 的倒数,即。这个公式表示在时间间隔 δt内,加速度的平均值乘以 δt 等于速度的变化量,再加上前一时刻的速度得到当前时刻的速度。
47、根据加速度的公式,可以得到
48、公式(7)
49、将位移的公式代入速度的定义式中,得到
50、公式(8)
51、再将上式中的速度代入位移的公式中,得到最终公式
52、公式(9)
53、将得到的位移数据按式(10)进行傅里叶反变换得到位移信号
54、公式(10)。
55、本发明由于采用了以上技术方案,与现有技术相比使其具有以下有益效果:海床滑动过程原位观测设备可独立布放,有效克服深海环境中的高水压作用,所述供电装置可在水下为采集存储系统长期供电,为原位观测的长周期性提供条件,实现长期观测海床大长度滑动过程的目的,准确测量海床沿各个方向运动的位移。通过设置声学释放器、玻璃浮球等部件,实现装置的回收,进行回收再利用,具有重复利用的特征,可大大节约观测成本。
56、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!