一种旋转式惯组全参数标定方法及装置与流程
本发明属于惯组标定,具体涉及一种旋转式惯组全参数标定方法及装置。
背景技术:
1、旋转式惯组利用内部的旋转框架可以代替传统的三轴转台或标定台,无需将惯组从载具上拆下来就能实现自动标定,极大地降低了惯组的维护成本。定期执行惯组自标定流程可以显著提升惯组的长期使用性能。随着技术水平的发展和惯组应用场景的不断丰富,用户对惯组自标定的快速性和参数完备性提出了更高的要求。传统的系统级自标定方法所标定的误差参数包括:陀螺和加速度计的常值零位,标度因数误差,安装偏差角,标定方法有解析式或卡尔曼滤波估计法,方法比较成熟稳定。加速度计的内杆臂参数用于表征加速度计敏感中心与惯组旋转中心之间的三维位置关系,也是惯组全参数的重要组成部分,一般通过惯组出厂时的结构尺寸直接确定。由于加速度计本身的结构特性,其敏感中心的位置难以精确获取,通过结构尺寸确定的内杆臂参数通常存在误差;另一方面,惯组在面对高低温、冲击振动、过载、应力改变等环境因素长期工作后,内杆臂参数也会发生一定程度的改变,若不对内杆臂参数进行定期标校,都会导致惯组导航性能的下降。
2、有鉴于此,本发明提出一种旋转式惯组全参数标定方法及装置,在不影响传统惯组误差参数标定的前提下,实现对内杆臂参数的标定,对惯组长期稳定性的提升具有重要的意义。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供一种旋转式惯组全参数标定方法及装置,在不影响传统惯组误差参数标定的前提下,实现对内杆臂参数的标定,从而实现惯组全参数的一次性标定。
2、为了实现上述目的,本发明采用以下技术方案。
3、第一方面,本发明提供一种旋转式惯组全参数标定方法,包括以下步骤:
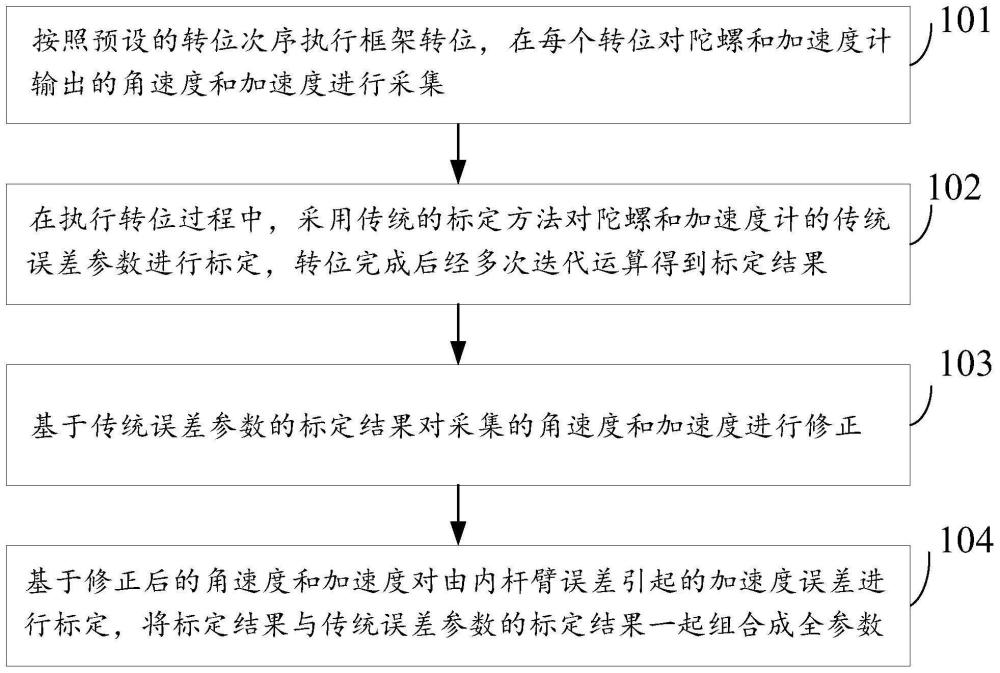
4、按照预设的转位次序执行框架转位,在每个转位对陀螺和加速度计输出的角速度和加速度进行采集;
5、在执行转位过程中,采用传统的标定方法对陀螺和加速度计的传统误差参数进行标定,转位完成后经多次迭代运算得到标定结果;
6、基于传统误差参数的标定结果对采集的角速度和加速度进行修正;
7、基于修正后的角速度和加速度对由内杆臂误差引起的加速度误差进行标定,将标定结果与传统误差参数的标定结果一起组合成全参数。
8、进一步地,所述按照预设的转位次序执行框架转位,包括:
9、s1、在起始位置,外框和内框均静止0°;
10、s2、内框固定为0°,外框从0°转位到90°,转位完成后静止;
11、s3、外框固定为90°,内框从0°起依次转位到90°、180°、270°、180°和90°,每次转位完成后静止;
12、s4、内框固定为90°,外框从90°起依次转位到180°、270°、360°、270°、180°和90°,每次转位完成后静止;
13、s5、外框固定为90°,内框从90°转位到0°,转位完成后静止;
14、s6、内框固定为0°,外框从90°起依次转位到180°、270°、180°、90°和0°,每次转位完成后静止。
15、进一步地,所述传统误差参数包括:陀螺零位,陀螺标度因数误差,陀螺安装误差角,加速度计零位,加速度计标度因数误差,加速度计安装误差角。
16、进一步地,修正后的角速度为:
17、
18、式中,为机体坐标系即b系的角速度矢量,为陀螺敏感轴测量坐标系到b系的姿态转移矩阵,为陀螺敏感轴的角速度矢量,δkgx、δkgy、δkgz为陀螺标度因数误差,为陀螺零位,为陀螺安装误差角;
19、修正后的加速度为:
20、
21、式中,为b系的加速度矢量,为加速度计敏感轴测量坐标系到b系的姿态转移矩阵,为加速度计敏感轴的加速度矢量,δkax、δkay、δkaz为加速度计标度因数误差,为加速度计零位,为加速度计安装误差角。
22、进一步地,所述对由内杆臂误差引起的加速度误差进行标定,包括:
23、构建卡尔曼滤波器的状态模型:
24、
25、式中,为导航坐标系的速度误差矢量,为导航坐标系的加速度矢量,表示平台偏角矢量,为地球自转角速度矢量,为机体坐标系到导航坐标系的姿态转移矩阵,为惯性空间坐标系内由内杆臂误差引起的机体坐标系加速度测量误差,下标i代表惯性空间坐标系;
26、内杆臂误差引起的加速度测量误差为:
27、
28、
29、式中,表示imu机体坐标系的旋转角速度矢量,分别为x、y、z轴加速度计的三维内杆臂误差矢量;
30、构建状态卡尔曼滤波器的状态向量:
31、
32、状态方程为:
33、
34、式中,f为状态转移矩阵,g为系统噪声驱动矩阵,w为系统噪声矩阵;f、g由公式(3)确定,w为高斯白噪声序列;
35、以惯导输出的速度误差构成量测向量,建立量测方程:
36、
37、式中,z为量测向量,量测向量通过惯导解算的导航坐标系速度误差获取,h为量测矩阵,由公式(3)确定,v为高斯白噪声量测噪声矩阵;
38、采用传统的离散型卡尔曼滤波方程进行滤波解算,进行时间更新和量测更新,滤波解算完成后,内杆臂参数的估计值即为内杆臂参数的最终标定结果。
39、第二方面,本发明提供一种旋转式惯组全参数标定装置,包括:
40、转位执行模块,用于按照预设的转位次序执行框架转位,在每个转位对陀螺和加速度计输出的角速度和加速度进行采集;
41、传统标定模块,用于在执行转位过程中,采用传统的标定方法对陀螺和加速度计的传统误差参数进行标定,转位完成后经多次迭代运算得到标定结果;
42、数据修正模块,用于基于传统误差参数的标定结果对采集的角速度和加速度进行修正;
43、内杆臂标定模块,用于基于修正后的角速度和加速度对由内杆臂误差引起的加速度误差进行标定,将标定结果与传统误差参数的标定结果一起组合成全参数。
44、进一步地,所述按照预设的转位次序执行框架转位,包括:
45、s1、在起始位置,外框和内框均静止0°;
46、s2、内框固定为0°,外框从0°转位到90°,转位完成后静止;
47、s3、外框固定为90°,内框从0°起依次转位到90°、180°、270°、180°和90°,每次转位完成后静止;
48、s4、内框固定为90°,外框从90°起依次转位到180°、270°、360°、270°、180°和90°,每次转位完成后静止;
49、s5、外框固定为90°,内框从90°转位到0°,转位完成后静止;
50、s6、内框固定为0°,外框从90°起依次转位到180°、270°、180°、90°和0°,每次转位完成后静止。
51、进一步地,所述传统误差参数包括:陀螺零位,陀螺标度因数误差,陀螺安装误差角,加速度计零位,加速度计标度因数误差,加速度计安装误差角。
52、进一步地,修正后的角速度为:
53、
54、式中,为机体坐标系即b系的角速度矢量,为陀螺敏感轴测量坐标系到b系的姿态转移矩阵,为陀螺敏感轴的角速度矢量,δkgx、δkgy、δkgz为陀螺标度因数误差,为陀螺零位,为陀螺安装误差角;
55、修正后的加速度为:
56、
57、式中,为b系的加速度矢量,为加速度计敏感轴测量坐标系到b系的姿态转移矩阵,为加速度计敏感轴的加速度矢量,δkax、δkay、δkaz为加速度计标度因数误差,为加速度计零位,为加速度计安装误差角。
58、进一步地,所述对由内杆臂误差引起的加速度误差进行标定,包括:
59、构建卡尔曼滤波器的状态模型:
60、
61、式中,为导航坐标系的速度误差矢量,为导航坐标系的加速度矢量,表示平台偏角矢量,为地球自转角速度矢量,为机体坐标系到导航坐标系的姿态转移矩阵,为惯性空间坐标系内由内杆臂误差引起的机体坐标系加速度测量误差,下标i代表惯性空间坐标系;
62、内杆臂误差引起的加速度测量误差为:
63、
64、
65、式中,表示imu机体坐标系的旋转角速度矢量,分别为x、y、z轴加速度计的三维内杆臂误差矢量;
66、构建状态卡尔曼滤波器的状态向量:
67、
68、状态方程为:
69、
70、式中,f为状态转移矩阵,g为系统噪声驱动矩阵,w为系统噪声矩阵;f、g由公式(3)确定,w为高斯白噪声序列;
71、以惯导输出的速度误差构成量测向量,建立量测方程:
72、
73、式中,z为量测向量,量测向量通过惯导解算的导航坐标系速度误差获取,h为量测矩阵,由公式(3)确定,v为高斯白噪声量测噪声矩阵;
74、采用传统的离散型卡尔曼滤波方程进行滤波解算,进行时间更新和量测更新,滤波解算完成后,内杆臂参数的估计值即为内杆臂参数的最终标定结果。
75、与现有技术相比,本发明具有以下有益效果。
76、本发明通过按照预设的转位次序执行框架转位,在每个转位对陀螺和加速度计输出的角速度和加速度进行采集,在执行转位过程中采用传统的标定方法对陀螺和加速度计的传统误差参数进行标定,转位完成后经多次迭代运算得到标定结果,基于传统误差参数的标定结果对采集的角速度和加速度进行修正,基于修正后的角速度和加速度对由内杆臂误差引起的加速度误差进行标定,将标定结果与传统误差参数的标定结果一起组合成全参数,实现了惯组全参数的一次性标定。本发明所述方法的内杆臂标定小于0.5mm,满足惯组内杆臂参数的标定精度要求;能够显著提升惯组的长期稳定性。
- 还没有人留言评论。精彩留言会获得点赞!