惯性导航路网匹配方法、装置、设备及存储介质与流程
本发明涉及车辆导航,尤其涉及一种惯性导航路网匹配方法、装置、设备及存储介质。
背景技术:
1、数字路网匹配最早与地理信息系统(geographic information system,gis)结合使用,路网匹配作为一种软件纠错技术,它将导航定位系统采集的位置信息与路网数据库中的位置信息进行比较,从而计算出导航系统在路网中的匹配位置。
2、在路网匹配方法上,主要采用点到线路网匹配方法,它将点到道路距离等因素通过各自加权系数累加,运用权重的策略将点匹配到道路上;然而这种点到线的匹配由于缺乏对整体轨迹趋势的考虑,在复杂的路网环境下容易导致误匹配。
技术实现思路
1、本发明的主要目的在于提供一种惯性导航路网匹配方法、装置、设备及存储介质,旨在解决现有技术中路网匹配点到线的匹配缺乏对整体轨迹趋势的考虑,容易导致误匹配的技术问题。
2、第一方面,本发明提供一种惯性导航路网匹配方法,所述惯性导航路网匹配方法包括以下步骤:
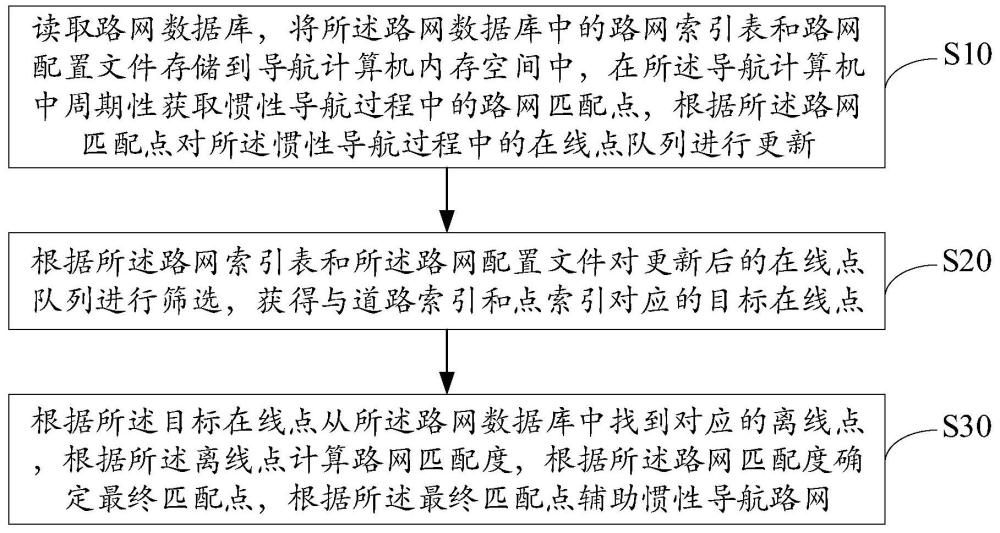
3、读取路网数据库,将所述路网数据库中的路网索引表和路网配置文件存储到导航计算机内存空间中,在所述导航计算机中周期性获取惯性导航过程中的路网匹配点,根据所述路网匹配点对所述惯性导航过程中的在线点队列进行更新;
4、根据所述路网索引表和所述路网配置文件对更新后的在线点队列进行筛选,获得与道路索引和点索引对应的目标在线点;
5、根据所述目标在线点从所述路网数据库中找到对应的离线点,根据所述离线点计算路网匹配度,根据所述路网匹配度确定最终匹配点,根据所述最终匹配点辅助惯性导航路网。
6、可选地,所述读取路网数据库,所述读取路网数据库,将所述路网数据库中的路网索引表和路网配置文件存储到导航计算机内存空间中,在所述导航计算机中周期性获取惯性导航过程中的路网匹配点,根据所述路网匹配点对所述惯性导航过程中的在线点队列进行更新,包括:
7、读取路网数据库,获得路网索引表和路网配置文件;
8、构建二维数组,通过所述二维数组在导航计算机内构建索引表内存空间,将所述路网数据库中的路网索引表和路网配置文件存储在所述索引表内存空间中;
9、获取匹配点获取周期,根据所述匹配点获取周期在所述导航计算机中周期性获取惯性导航过程中的路网匹配点,根据所述路网匹配点对所述惯性导航过程的在线点队列进行更新。
10、可选地,所述获取匹配点获取周期,根据所述匹配点获取周期在所述导航计算机中周期性获取惯性导航过程中的路网匹配点,根据所述路网匹配点对所述惯性导航过程的在线点队列进行更新,包括:
11、获取匹配点获取周期,根据所述匹配点获取周期在所述导航计算机中周期性获取惯性导航过程中的路网匹配点;
12、通过嵌入式程序维护预设容量的在线点队列;
13、根据所述路网匹配点将所述在线点队列中在线点的经纬度存储在所述在线点队列中;
14、计算所述惯性导航过程中的所述路网匹配点与所述在线点队列中最新在线点之间的径向距离;
15、将所述径向距离与预设距离阈值比较,生成比较结果;
16、在所述比较结果为所述径向距离超过所述预设距离阈值时,将所述径向距离超过所述预设距离阈值的目标在线点加入所述在线点队列,更新所述在线点队列。
17、可选地,所述将所述径向距离与预设距离阈值比较,生成比较结果之后,所述惯性导航路网匹配方法还包括:
18、在所述径向距离与所述预设距离阈值一样,且所述径向距离为多个时,通过下式计算内插值:
19、n=dist/z
20、latinsert=latk+(lat0-latk)·zi/dist
21、lgtinsert=lgtk+(lgt0-lgtk)·zi/dist
22、其中,n为插值总个数,dist为径向距离,z为所述预设距离阈值,latinsert为插值的纬度,lgtinsert为插值的经度,latk为队列中最新在线点的纬度,lgtk为队列中最新在线点的经度,lat0为所述惯性导航过程中所述路网匹配点的纬度,lgto为所述惯性导航过程中所述路网匹配点的经度,i=1…n;
23、将所述径向距离对应的在线点和内插值一起加入所述在线点队列,更新所述在线点队列。
24、可选地,所述根据所述路网索引表和所述路网配置文件对更新后的在线点队列进行筛选,获得与道路索引和点索引对应的目标在线点,包括:
25、根据所述路网索引表和所述路网配置文件对更新后的在线点队列中前预设筛选数量的初筛点进行遍历,判断所述初筛点是否在预设范围内;
26、在所述初筛点在所述预设范围内时,获得所述初筛点在所述路网索引表中的坐标,并获得对应去程和回程的道路索引及点索引;
27、根据所述道路索引获得众数、众数的个数,以及所述众数和所述众数的个数对应的众数占比;
28、在只有去程的道路索引的众数占比超过预设众数占比,且所述点索引的点索引顺序递增时,判定当前筛选结果为去程道路,生成所述去程道路对应的去程在线点;
29、在只有回程的道路索引的众数占比超过预设众数占比,且所述点索引的点索引顺序递增时,判定当前筛选结果为回程道路,生成所述回程道路对应的回程在线点;
30、在去程和回程的道路索引均满足或均不满足众数占比超过预设众数占比,且去程和回程的所述点索引均满足或不满足点索引顺序递增时,判定筛选失败,结束当前路网匹配流程。
31、可选地,所述根据所述目标在线点从所述路网数据库中找到对应的离线点,根据所述离线点计算路网匹配度,根据所述路网匹配度确定最终匹配点,根据所述最终匹配点辅助惯性导航路网,包括:
32、根据所述目标在线点从所述路网数据库中找到对应的离线点,将所述离线点前后预设相邻数量的相邻离线点组成待匹配点集;
33、获得所述待匹配点集中的待匹配点的方位角和累积里程,根据所述方位角判断所述待匹配点是否满足预设匹配要求;
34、在所述待匹配点满足所述预设匹配要求时,根据所述累积里程计算获得路网匹配度;
35、在所述路网匹配度大于预设匹配度阈值时,确定对应的匹配点为最终匹配点,根据所述最终匹配点辅助惯性导航路网。
36、可选地,所述在所述待匹配点满足所述预设匹配要求时,根据所述累积里程计算获得路网匹配度,包括:
37、在所述待匹配点的方位角和的极差大于预设极差阈值时,判定所述待匹配点满足所述预设匹配要求,根据所述累积里程通过下式计算获得路网匹配度:
38、
39、其中,coef为路网匹配度,sumdeltaphi为累积里程,n为离线点数量,m为在线点数量,l为m个在线点差分运算后的差分结果数量;
40、计算惯性导航所述路网匹配点与队列中最新的在线点的径向距离,将所述径向距离超过预设距离阈值。
41、第二方面,为实现上述目的,本发明还提出一种惯性导航路网匹配装置,所述惯性导航路网匹配装置包括:
42、队列更新模块,用于读取路网数据库,将所述路网数据库中的路网索引表和路网配置文件存储到导航计算机内存空间中,在所述导航计算机中周期性获取惯性导航过程中的路网匹配点,根据所述路网匹配点对所述惯性导航过程中的在线点队列进行更新;
43、筛选模块,用于根据所述路网索引表和所述路网配置文件对更新后的在线点队列进行筛选,获得与道路索引和点索引对应的目标在线点;
44、匹配模块,用于根据所述目标在线点从所述路网数据库中找到对应的离线点,根据所述离线点计算路网匹配度,根据所述路网匹配度确定最终匹配点,根据所述最终匹配点辅助惯性导航路网。
45、第三方面,为实现上述目的,本发明还提出一种惯性导航路网匹配设备,所述惯性导航路网匹配设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的惯性导航路网匹配程序,所述惯性导航路网匹配程序配置为实现如上文所述的惯性导航路网匹配方法的步骤。
46、第四方面,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有惯性导航路网匹配程序,所述惯性导航路网匹配程序被处理器执行时实现如上文所述的惯性导航路网匹配方法的步骤。
47、本发明提出的惯性导航路网匹配方法,通过读取路网数据库,将所述路网数据库中的路网索引表和路网配置文件存储到导航计算机内存空间中,在所述导航计算机中周期性获取惯性导航过程中的路网匹配点,根据所述路网匹配点对所述惯性导航过程中的在线点队列进行更新;根据所述路网索引表和所述路网配置文件对更新后的在线点队列进行筛选,获得与道路索引和点索引对应的目标在线点;根据所述目标在线点从所述路网数据库中找到对应的离线点,根据所述离线点计算路网匹配度,根据所述路网匹配度确定最终匹配点,根据所述最终匹配点辅助惯性导航路网;能够提高定位车辆在电子地图中的位置精度,相比于传统的遍历路网数据库获得匹配点的方式,本方案大大减少了遍历运算的次数,直接在计算机内存中交互匹配点,降低了导航成本,规避了通讯延时,有效提升了车载导航的精度,提升了惯性导航路网匹配的速度和效率。
- 还没有人留言评论。精彩留言会获得点赞!