一种日盲紫外成像目标识别跟踪方法及系统与流程
本发明涉及高压电气设备外绝缘放电检测,并且更具体地,涉及一种基于r2cnn的日盲紫外成像目标识别跟踪方法及系统。
背景技术:
1、高压电气设备在长期的运行环境下,会出现绝缘性能下降、结构损坏和表面积污等问题,引起电场集中从而发生电晕放电,影响设备的带电安全运行。设备放电现象的光谱分析表明其波长范围为230nm~405nm,紫外线的波长范围是40nm~400nm,太阳光中也含有紫外线,由于地球的臭氧层吸收了一部分波长的分量,其中240nm~280nm的光谱段称为太阳盲区,该段内太阳发射的紫外光量极低。根据这一特性,研制开发了用于日间检测电晕的紫外成像仪,通过接收电晕放电产生的信号,经处理后成像并于可见光图像叠加,确定电晕位置和放电强度,为设备的状态检测提供依据。电晕放电会产生紫外线,即使较为微弱的放电,也可以用紫外成像仪器观测到,紫外成像技术已广泛应用于电力系统对高压电气设备电晕放电的检测试验、带电运行维护中,利用紫外光谱范围的光来获取图像,根据紫外成像图谱来确定放电的位置以及判断放电的强度等。
2、紫外光具有更短的波长,可以穿透雾霾、烟尘等障碍物,因此具有较好的目标识别效果。然而在低图像分辨率、低空间分辨率、遮挡等客观条件下,会导致测试和定位有异常,对测试结果存在较大的差异。因此,亟需一种用于紫外成像的目标识别及跟踪方法,以解决上述问题。
3、目标识别是指自动识别图像或视频中的目标对象的过程。传统的目标识别方法包括特征提取和分类器的组合,而基于深度学习的方法如卷积神经网络(cnn)在目标识别任务上取得了显著的进展;r2cnn算法(rotation region cnn,旋转区域卷积神经网络)是一种基于深度学习的目标检测算法,结合了区域候选网络(rpn)和候选框分类网络(fast r-cnn)的思想。r2cnn算法能够高效准确地进行目标检测和跟踪,对于紫外成像目标识别和跟踪具有重要意义。
技术实现思路
1、根据本发明,提供了一种日盲紫外成像目标识别跟踪方法及系统,以解决在低图像分辨率、低空间分辨率、遮挡等客观条件下,会导致测试和定位有异常,对测试结果存在较大的差异的技术问题。
2、根据本发明的第一个方面,提供了一种日盲紫外成像目标识别跟踪方法,包括:
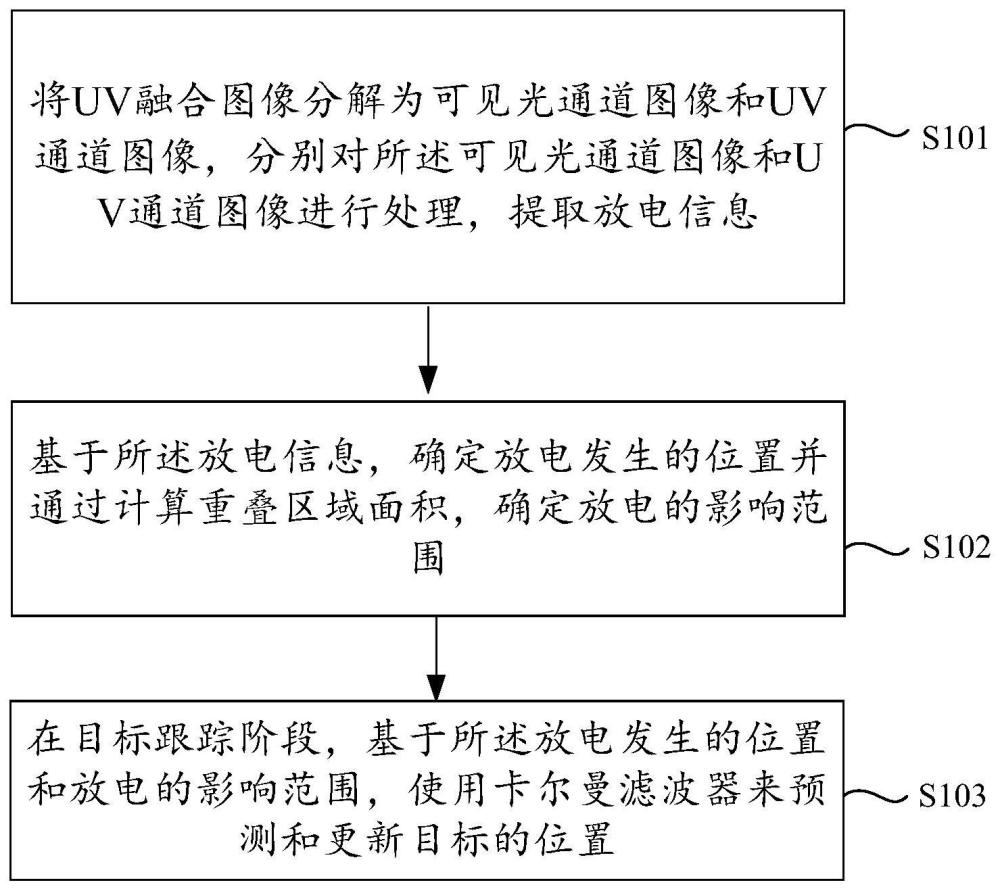
3、将uv融合图像分解为可见光通道图像和uv通道图像,分别对所述可见光通道图像和uv通道图像进行处理,提取放电信息;
4、基于所述放电信息,确定放电发生的位置并通过计算重叠区域面积,确定放电的影响范围;
5、在目标跟踪阶段,基于所述放电发生的位置和放电的影响范围,使用卡尔曼滤波器来预测和更新目标的位置。
6、可选地,对所述可见光通道图像进行处理,提取放电信息,包括:
7、检测可见光通道图像中放电发生的部分,这些部分涉及到外绝缘设备的主体部分和金属配件部分;
8、将检测设备划分为两部分:设备本体和设备金具;
9、通过r2cnn网络,检测并标注出设备本体和设备金具区域,每个区域用以下表示形式标记:ri={cx,i,cy,i,θi,wi,hi,si},其中cx,i,cy,i是检测区域内中心点的像素坐标,θi是ri的方向角,wi和hi是宽度和高度,si表示区域的类别,si=1代表设备本体,si=2代表设备金具。
10、可选地,对所述uv通道图像进行处理,提取放电信息,包括:
11、在uv通道图像中寻找放电现象的光斑区域,使用otsu方法来获得自适应二进制阈值,通过设定阈值t,将uv通道图像转换为二值化图像b,其中iu为uv通道图像,b为二值化图像
12、在二值化图像b中标记光斑区域,将其表示为rs={ax,cx,s,cy,s},其中cx,s,cy,s是光斑区域内中心点的像素坐标,ax表示rs的面积,即光斑区域中像素的个数。
13、可选地,基于所述放电信息,确定放电发生的位置,包括:
14、定义三个中心点,即设备本体区域的中心点cb=[cx,b,cy,b],设备金具区域的中心点cf=[cx,f,cy,f],光斑区域的中心点cs=[cx,s,cy,s],分别确定光斑区域的中心点到设备本体区域的中心点和设备金具区域的中心点的相对位置;
15、基于所述三个中心点的位置关系,判断光斑区域是位于设备本体区域内,设备金具区域内,还是既不在设备本体区域也不在设备金具区域内;
16、若所述光斑区域既不在设备本体区域也不在设备金具区域内,通过计算cs到cb和cf的距离,可以得到距离值和d1视为到设备本体区域的距离,d2视为到设备金具区域的距离,如果d1<d2,等效地认为放电发生在设备本体区域。否则,放电被视为发生在设备金具区域。
17、可选地,通过计算重叠区域面积,确定放电的影响范围,包括:
18、在uv融合图像中,计算设备本体区域和光斑区域之间的重叠像素,得到重叠区域面积ao,所述重叠区域面积ao反映了放电对设备本体的影响范围;
19、对光斑区域面积进行归一化处理,通过引入标准增益q和真实检测增益p,得到一个等效的光斑区域面积消除了增益的影响;
20、
21、随着检测距离的增加,光斑区域的大小按相同的比例减小,在标准增益下,光斑面积与探测距离的关系近似成正比关系,假设实际检测距离为d,将光斑面积归一化为距离d,得到归一化的光斑区域面积
22、
23、确定放电信息的特征参数写为[l,n,r],其中,l代表放电与设备的位置关系,l=1表示放电发生在本体区域,l=2表示放电发生在金属配件区域;n是光子数,从uv成像仪获得,r可以使用以下公式计算
24、
25、ab为设备本体的面积,通过以上三个特征参数[l,n,r],得到放电的位置关系、放电的强度以及放电的影响范围。
26、可选地,在目标跟踪阶段,基于所述放电发生的位置和放电的影响范围,使用卡尔曼滤波器来预测和更新目标的位置,包括:
27、基于经典卡尔曼滤波器的目标跟踪方案由以下步骤完成:
28、k时刻位置的控制方程:
29、xk=axk-1+wk-1
30、wk-1=gk-1fk-1
31、其中,a表示由k-1时刻到k时刻的过渡矩阵,w表示高斯过程噪声,xk为描述系统动态行为的状态向量,卡尔曼滤波器的目标是根据每个时刻的观测值,来纠正当前时刻的观测值zk,并获得系统的真实状态;
32、观测方程
33、zk=hxk+vk
34、其中,h表示观测矩阵,vk表示高斯测量噪声;
35、时间更新方程
36、
37、pk-=apk-1at+q
38、其中,pk表示后验误差估计,由观测值计算而来,q为白噪声;
39、观测更新方程
40、kk=pk-ht(hpk-ht+r)-1
41、
42、pk=(1-kkh)pk-
43、其中,k为卡尔曼增益矩阵;
44、在初始化阶段,根据目标识别结果,将初始位置信息输入到卡尔曼滤波器中,初始化滤波器的状态向量、状态协方差矩阵和过程噪声协方差矩阵;在每一帧的跟踪过程中,卡尔曼滤波器根据先前的状态估计和当前帧的观测结果,进行目标位置的预测和更新。
45、根据本发明的另一个方面,还提供了一种盲紫外成像目标识别跟踪系统,包括:
46、提取放电信息模块,用于将uv融合图像分解为可见光通道图像和uv通道图像,分别对所述可见光通道图像和uv通道图像进行处理,提取放电信息;
47、确定放电影响范围模块,用于基于所述放电信息,确定放电发生的位置并通过计算重叠区域面积,确定放电的影响范围;
48、预测更新目标位置模块,用于在目标跟踪阶段,基于所述放电发生的位置和放电的影响范围,使用卡尔曼滤波器来预测和更新目标的位置。
49、可选地,提取放电信息模块,包括:
50、检测放电发生部分子模块,用于检测可见光通道图像中放电发生的部分,这些部分涉及到外绝缘设备的主体部分和金属配件部分;
51、划分检测设备子模块,用于将待检测设备划分为两部分:设备本体和设备金具;
52、检测设备区域子模块,用于通过r2cnn网络,检测并标注出设备本体和设备金具区域,每个区域用以下表示形式标记:ri={cx,i,cy,i,θi,wi,hi,si},其中cx,i,cy,i是检测区域内中心点的像素坐标,θi是ri的方向角,wi和hi是宽度和高度,si表示区域的类别,si=1代表设备本体,si=2代表设备金具。
53、可选地,提取放电信息模块,包括:
54、寻找光斑区域子模块,用于在uv通道图像中寻找放电现象的光斑区域,使用otsu方法来获得自适应二进制阈值,通过设定阈值t,将uv通道图像转换为二值化图像b,其中iu为uv通道图像,b为二值化图像
55、标记光斑区域子模块,用于在二值化图像b中标记光斑区域,将其表示为rs={ax,cx,s,cy,s},其中cx,s,cy,s是光斑区域内中心点的像素坐标,ax表示rs的面积,即光斑区域中像素的个数。
56、可选地,确定放电影响范围模块,包括:
57、确定相对位置子模块,用于定义三个中心点,即设备本体区域的中心点cb=[cx,b,cy,b],设备金具区域的中心点cf=[cx,f,cy,f],光斑区域的中心点cs=[cx,s,cy,s],分别确定光斑区域的中心点到设备本体区域的中心点和设备金具区域的中心点的相对位置;
58、判断光斑区域子模块,用于基于所述三个中心点的位置关系,判断光斑区域是位于设备本体区域内,设备金具区域内,还是既不在设备本体区域也不在设备金具区域内;
59、得到距离值子模块,用于若所述光斑区域既不在设备本体区域也不在设备金具区域内,通过计算cs到cb和cf的距离,可以得到距离值和d1视为到设备本体区域的距离,d2视为到设备金具区域的距离,如果d1<d2,等效地认为放电发生在设备本体区域,否则,放电被视为发生在设备金具区域。
60、可选地,确定放电影响范围模块,包括:
61、计算重叠区域面积子模块,用于在uv融合图像中,计算设备本体区域和光斑区域之间的重叠像素,得到重叠区域面积ao,所述重叠区域面积ao反映了放电对设备本体的影响范围;
62、进行归一化处理子模块,用于对光斑区域面积进行归一化处理,通过引入标准增益q和真实检测增益p,得到一个等效的光斑区域面积消除了增益的影响;
63、
64、得到归一化光斑区域面积子模块,用于随着检测距离的增加,光斑区域的大小按相同的比例减小,在标准增益下,光斑面积与探测距离的关系近似成正比关系,假设实际检测距离为d,将光斑面积归一化为距离d,得到归一化的光斑区域面积
65、
66、确定放电信息的特征参数写为[l,n,r],其中,l代表放电与设备的位置关系,l=1表示放电发生在本体区域,l=2表示放电发生在金属配件区域;n是光子数,从uv成像仪获得,r可以使用以下公式计算
67、
68、ab为设备本体的面积,通过以上三个特征参数[l,n,r],得到放电的位置关系、放电的强度以及放电的影响范围。
69、可选地,预测更新目标位置模块,包括:
70、预测更新目标位置子模块,用于基于经典卡尔曼滤波器的目标跟踪方案由以下步骤完成:
71、k时刻位置的控制方程:
72、xk=axk-1+wk-1
73、wk-1=gk-1fk-1
74、其中,a表示由k-1时刻到k时刻的过渡矩阵,w表示高斯过程噪声,xk为描述系统动态行为的状态向量,卡尔曼滤波器的目标是根据每个时刻的观测值,来纠正当前时刻的观测值zk,并获得系统的真实状态;
75、观测方程
76、zk=hxk+vk
77、其中,h表示观测矩阵,vk表示高斯测量噪声;
78、时间更新方程
79、
80、pk-=apk-1at+q
81、其中,pk表示后验误差估计,由观测值计算而来,q为白噪声;
82、观测更新方程
83、kk=pk-ht(hpk-ht+r)-1
84、
85、pk=(1-kkh)pk-
86、其中,k为卡尔曼增益矩阵;
87、在初始化阶段,根据目标识别结果,将初始位置信息输入到卡尔曼滤波器中,初始化滤波器的状态向量、状态协方差矩阵和过程噪声协方差矩阵;在每一帧的跟踪过程中,卡尔曼滤波器根据先前的状态估计和当前帧的观测结果,进行目标位置的预测和更新。
88、从而,采集外绝缘设备的uv融合图像,获取外绝缘设备的放电信息;根据放电信息,确定外绝缘设备的放电目标的放电位置和影响范围,并通过卡尔曼滤波器来预测和更新放电目标的位置;本发明能够准确跟踪目标,并处理运动、遮挡和光照变化等因素,提高跟踪的准确性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!