一种河道水质智能监测方法及系统与流程
本发明涉及数据监测,尤其涉及一种河道水质智能监测方法及系统。
背景技术:
1、水质监测是用于治理城市水污染的重要技术手段,随着水污染问题日益严重,这一技术手段也日渐受到重视。但现有的水质监测手段,基本都是依赖简单的传感器和数据判定规则来实现,在一些水质污染问题严重且关键的区域,现有技术无法达到有效的监测效果。可见,现有技术存在缺陷,亟需解决。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种河道水质智能监测方法及系统,能够实现对河道的水质监测,另一方面可以更加精确和节能地控制传感器的动作,减少能耗。
2、为了解决上述技术问题,本发明第一方面公开了一种河道水质智能监测方法,所述方法包括:
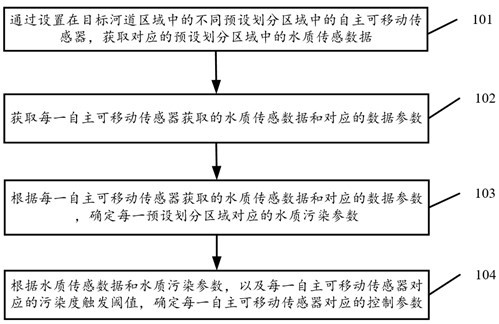
3、通过设置在目标河道区域中的不同预设划分区域中的自主可移动传感器,获取对应的所述预设划分区域中的水质传感数据;不同所述预设划分区域之间通过隔网隔开;
4、获取每一所述自主可移动传感器获取的所述水质传感数据和对应的数据参数;
5、根据每一所述自主可移动传感器获取的所述水质传感数据和对应的数据参数,确定每一所述预设划分区域对应的水质污染参数;
6、根据所述水质传感数据和所述水质污染参数,以及每一所述自主可移动传感器对应的污染度触发阈值,确定每一所述自主可移动传感器对应的控制参数;所述控制参数用于控制所述自主可移动传感器的水质采样动作以降低能耗。
7、作为一种可选的实施方式,在本发明第一方面中,所述数据参数包括获取时间、获取位置、获取时速度和获取时设备参数中的至少两种;所述获取时设备参数包括设备类型、设备电量、设备健康度参数和设备磨损度参数中的至少一种;和/或,所述水质传感数据包括物理传感数据、化学物质含量传感数据、生物指标传感数据和放射性指标传感数据中的一种或多种;所述物理传感数据包括气味传感数据、温度传感数据、浑浊度传感数据、透明度传感数据、颜色传感数据中的至少一种;所述化学物质含量传感数据包括氯离子含量传感数据、铵离子含量传感数据、硝酸根离子含量传感数据、亚硝酸根离子含量传感数据、钾离子含量传感数据、钙离子含量传感数据、镁离子含量传感数据、钠离子含量传感数据、氟化物含量传感数据中的至少一种;所述生物指标传感数据包括细菌指标传感数据、大肠菌群指标传感数据、藻类指标传感数据中的至少一种;所述放射性指标传感数据包括α射线放射性指标传感数据、β射线放射性指标传感数据、铀放射性指标传感数据、镭放射性指标传感数据、钍放射性指标传感数据中的至少一种。
8、作为一种可选的实施方式,在本发明第一方面中,所述根据每一所述自主可移动传感器获取的所述水质传感数据和对应的数据参数,确定每一所述预设划分区域对应的水质污染情况,包括:
9、对于每一所述预设划分区域,获取该预设划分区域中的所有所述自主可移动传感器获取到的所述水质传感数据和对应的数据参数;
10、对于该预设划分区域中的任一所述自主可移动传感器获取到的所述水质传感数据,根据神经网络算法模型确定该水质传感数据对应的水质污染程度参数;
11、根据该水质传感数据对应的数据类型和所述数据参数,确定该水质传感数据对应的准确权重;
12、计算该水质传感数据对应的所述水质污染程度参数和所述准确权重的乘积,得到该水质传感数据对应的数据水质污染参数;
13、计算该预设划分区域中的所有所述自主可移动传感器的所有所述水质传感数据对应的所述数据水质污染参数的平均值,得到该预设划分区域对应的水质污染参数。
14、作为一种可选的实施方式,在本发明第一方面中,所述根据神经网络算法模型确定该水质传感数据对应的水质污染程度参数,包括:
15、将该水质传感数据输入至的该水质传感数据的数据类型对应的训练好的第一神经网络模型中,以得到输出的该水质传感数据对应的水质污染程度参数;所述第一神经网络模型通过包括有多个同一所述数据类型的训练水质传感数据和对应的水质污染标注的训练数据集训练得到。
16、作为一种可选的实施方式,在本发明第一方面中,所述根据该水质传感数据对应的数据类型和所述数据参数,确定该水质传感数据对应的准确权重,包括:
17、确定该水质传感数据对应的所述自主可移动传感器的历史水质传感记录;
18、计算所述历史水质传感记录中该水质传感数据的数据类型对应的记录的第一传感准确率;
19、计算所有所述自主可移动传感器的历史水质传感记录中,与所述数据参数相同的记录的第二传感准确率;所述传感准确率为所述记录中水质传感数据被所述第一神经网络模型判定为污染且实际出现污染情况的记录数量与总记录数量的比值;
20、将所述该水质传感数据对应的数据类型和所述数据参数输入至训练好的第二神经网络模型中,以得到输出的传感准确预测参数;所述第二神经网络模型通过包括有多个训练用的所述数据类型和所述数据参数和对应的传感是否准确标注的训练数据集训练得到;
21、计算所述第一传感准确率、所述第二传感准确率和所述传感准确预测参数的加权求和平均值,得到该水质传感数据对应的准确权重。
22、作为一种可选的实施方式,在本发明第一方面中,所述根据所述水质传感数据和所述水质污染参数,以及每一所述自主可移动传感器对应的污染度触发阈值,确定每一所述自主可移动传感器对应的控制参数,包括:
23、对于每一所述自主可移动传感器,计算该自主可移动传感器对应的污染度处罚阈值和该自主可移动传感器获取的所述水质传感数据之间的差值;
24、计算所述差值和该自动可移动传感器对应的预设划分区域的所述水质污染参数之间的比值,得到该自主可移动传感器对应的污染影响因子;
25、根据处于同一所述预设划分区域中的所有所述自主可移动传感器的所述污染影响因子,确定该自主可移动传感器对应的控制参数。
26、作为一种可选的实施方式,在本发明第一方面中,所述根据处于同一所述预设划分区域中的所有所述自主可移动传感器的所述污染影响因子,确定该自主可移动传感器对应的控制参数,包括:
27、将处于同一所述预设划分区域中的所有其他所述自主可移动传感器确定为同区域传感器;
28、确定每一所述同区域传感器的当前位置;
29、根据所述当前位置,确定离该自主可移动传感器最近的预设数量个所述同区域传感器的所述影响因子的平均值,以得到该自主可移动传感器对应的周围影响因子;
30、判断该自主可移动传感器的所述影响因子是否大于所述周围影响因子,若是,则提高该自主可移动传感器的采样频率,否则,则降低采样频率。
31、作为一种可选的实施方式,在本发明第一方面中,所述根据处于同一所述预设划分区域中的所有所述自主可移动传感器的所述污染影响因子,确定该自主可移动传感器对应的控制参数,还包括:
32、根据该自主可移动传感器对应的调整后的采样频率,以及预设的频率-速度对应关系,确定所述调整后的采样频率对应的采样时运行速度区间;
33、实时计算所述最近的预设数量个所述同区域传感器对应的采样时运行速度的加权求和平均值;其中,每一所述同区域传感器对应的权重与所述影响因子成反比;
34、判断该自动可移动传感器的采样时运行速度是否大于所述速度平均值,若是则在所述采样时运行速度区间内降低采样时运行速度,若否则在所述采样时运行速度区间内提高采样时运行速度。
35、本发明第二方面公开了一种河道水质智能监测系统,所述系统包括:
36、第一获取模块,用于通过设置在目标河道区域中的不同预设划分区域中的自主可移动传感器,获取对应的所述预设划分区域中的水质传感数据;不同所述预设划分区域之间通过隔网隔开;
37、第二获取模块,用于获取每一所述自主可移动传感器获取的所述水质传感数据和对应的数据参数;
38、第一确定模块,用于根据每一所述自主可移动传感器获取的所述水质传感数据和对应的数据参数,确定每一所述预设划分区域对应的水质污染参数;
39、第二确定模块,用于根据所述水质传感数据和所述水质污染参数,以及每一所述自主可移动传感器对应的污染度触发阈值,确定每一所述自主可移动传感器对应的控制参数;所述控制参数用于控制所述自主可移动传感器的水质采样动作以降低能耗。
40、作为一种可选的实施方式,在本发明第二方面中,所述数据参数包括获取时间、获取位置、获取时速度和获取时设备参数中的至少两种;所述获取时设备参数包括设备类型、设备电量、设备健康度参数和设备磨损度参数中的至少一种;和/或,所述水质传感数据包括物理传感数据、化学物质含量传感数据、生物指标传感数据和放射性指标传感数据中的一种或多种;所述物理传感数据包括气味传感数据、温度传感数据、浑浊度传感数据、透明度传感数据、颜色传感数据中的至少一种;所述化学物质含量传感数据包括氯离子含量传感数据、铵离子含量传感数据、硝酸根离子含量传感数据、亚硝酸根离子含量传感数据、钾离子含量传感数据、钙离子含量传感数据、镁离子含量传感数据、钠离子含量传感数据、氟化物含量传感数据中的至少一种;所述生物指标传感数据包括细菌指标传感数据、大肠菌群指标传感数据、藻类指标传感数据中的至少一种;所述放射性指标传感数据包括α射线放射性指标传感数据、β射线放射性指标传感数据、铀放射性指标传感数据、镭放射性指标传感数据、钍放射性指标传感数据中的至少一种。
41、作为一种可选的实施方式,在本发明第二方面中,所述第一确定模块根据每一所述自主可移动传感器获取的所述水质传感数据和对应的数据参数,确定每一所述预设划分区域对应的水质污染情况的具体方式,包括:
42、对于每一所述预设划分区域,获取该预设划分区域中的所有所述自主可移动传感器获取到的所述水质传感数据和对应的数据参数;
43、对于该预设划分区域中的任一所述自主可移动传感器获取到的所述水质传感数据,根据神经网络算法模型确定该水质传感数据对应的水质污染程度参数;
44、根据该水质传感数据对应的数据类型和所述数据参数,确定该水质传感数据对应的准确权重;
45、计算该水质传感数据对应的所述水质污染程度参数和所述准确权重的乘积,得到该水质传感数据对应的数据水质污染参数;
46、计算该预设划分区域中的所有所述自主可移动传感器的所有所述水质传感数据对应的所述数据水质污染参数的平均值,得到该预设划分区域对应的水质污染参数。
47、作为一种可选的实施方式,在本发明第二方面中,所述第一确定模块根据神经网络算法模型确定该水质传感数据对应的水质污染程度参数的具体方式,包括:
48、将该水质传感数据输入至的该水质传感数据的数据类型对应的训练好的第一神经网络模型中,以得到输出的该水质传感数据对应的水质污染程度参数;所述第一神经网络模型通过包括有多个同一所述数据类型的训练水质传感数据和对应的水质污染标注的训练数据集训练得到。
49、作为一种可选的实施方式,在本发明第二方面中,所述第一确定模块根据该水质传感数据对应的数据类型和所述数据参数,确定该水质传感数据对应的准确权重的具体方式,包括:
50、确定该水质传感数据对应的所述自主可移动传感器的历史水质传感记录;
51、计算所述历史水质传感记录中该水质传感数据的数据类型对应的记录的第一传感准确率;
52、计算所有所述自主可移动传感器的历史水质传感记录中,与所述数据参数相同的记录的第二传感准确率;所述传感准确率为所述记录中水质传感数据被所述第一神经网络模型判定为污染且实际出现污染情况的记录数量与总记录数量的比值;
53、将所述该水质传感数据对应的数据类型和所述数据参数输入至训练好的第二神经网络模型中,以得到输出的传感准确预测参数;所述第二神经网络模型通过包括有多个训练用的所述数据类型和所述数据参数和对应的传感是否准确标注的训练数据集训练得到;
54、计算所述第一传感准确率、所述第二传感准确率和所述传感准确预测参数的加权求和平均值,得到该水质传感数据对应的准确权重。
55、作为一种可选的实施方式,在本发明第二方面中,所述第二确定模块根据所述水质传感数据和所述水质污染参数,以及每一所述自主可移动传感器对应的污染度触发阈值,确定每一所述自主可移动传感器对应的控制参数的具体方式,包括:
56、对于每一所述自主可移动传感器,计算该自主可移动传感器对应的污染度处罚阈值和该自主可移动传感器获取的所述水质传感数据之间的差值;
57、计算所述差值和该自动可移动传感器对应的预设划分区域的所述水质污染参数之间的比值,得到该自主可移动传感器对应的污染影响因子;
58、根据处于同一所述预设划分区域中的所有所述自主可移动传感器的所述污染影响因子,确定该自主可移动传感器对应的控制参数。
59、作为一种可选的实施方式,在本发明第二方面中,所述第二确定模块根据处于同一所述预设划分区域中的所有所述自主可移动传感器的所述污染影响因子,确定该自主可移动传感器对应的控制参数的具体方式,包括:
60、将处于同一所述预设划分区域中的所有其他所述自主可移动传感器确定为同区域传感器;
61、确定每一所述同区域传感器的当前位置;
62、根据所述当前位置,确定离该自主可移动传感器最近的预设数量个所述同区域传感器的所述影响因子的平均值,以得到该自主可移动传感器对应的周围影响因子;
63、判断该自主可移动传感器的所述影响因子是否大于所述周围影响因子,若是,则提高该自主可移动传感器的采样频率,否则,则降低采样频率。
64、作为一种可选的实施方式,在本发明第二方面中,所述第二确定模块根据处于同一所述预设划分区域中的所有所述自主可移动传感器的所述污染影响因子,确定该自主可移动传感器对应的控制参数的具体方式,还包括:
65、根据该自主可移动传感器对应的调整后的采样频率,以及预设的频率-速度对应关系,确定所述调整后的采样频率对应的采样时运行速度区间;
66、实时计算所述最近的预设数量个所述同区域传感器对应的采样时运行速度的加权求和平均值;其中,每一所述同区域传感器对应的权重与所述影响因子成反比;
67、判断该自动可移动传感器的采样时运行速度是否大于所述速度平均值,若是则在所述采样时运行速度区间内降低采样时运行速度,若否则在所述采样时运行速度区间内提高采样时运行速度。
68、本发明第三方面公开了另一种河道水质智能监测系统,所述系统包括:
69、存储有可执行程序代码的存储器;
70、与所述存储器耦合的处理器;
71、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明第一方面公开的河道水质智能监测方法中的部分或全部步骤。
72、与现有技术相比,本发明具有以下有益效果:
73、本发明能够通过对河道进行区域划分并放置多个自主可移动传感器来监测区域的水质情况,并进一步根据水质情况来控制传感器的采样动作以降低功耗,从而一方面能够实现对河道的水质监测,另一方面可以更加精确和节能地控制传感器的动作,减少能耗。
- 还没有人留言评论。精彩留言会获得点赞!