一种重型设备的重心测量方法与流程
本发明涉及重心测量,尤其涉及一种重型设备的重心测量方法。
背景技术:
1、重型设备具有体积较大,质量较重的特点。其固有特性,例如重心位置在一些应用场景中是必须用到的,所以某些重型设备的固有特性是需要测试的。
2、目前常用的测试重心的方案为悬挂法,通过将待测物体悬挂获取重力的作用线,多条作用线相交即可以获取待测物体的重心上述测量重心的方法需要将待测物体腾空悬挂,当待测物体较重时,存在一定的安全和经济隐患。在重心测量时,由于待测物体表面可能不规则,悬挂的重力作用线定位比较困难。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种重型设备的重心测量方法,用以解决现有重型设备采用悬挂法测量的安全性和经济性隐患的问题。
2、本发明提供了一种重型设备的重心测量方法,包括如下步骤:
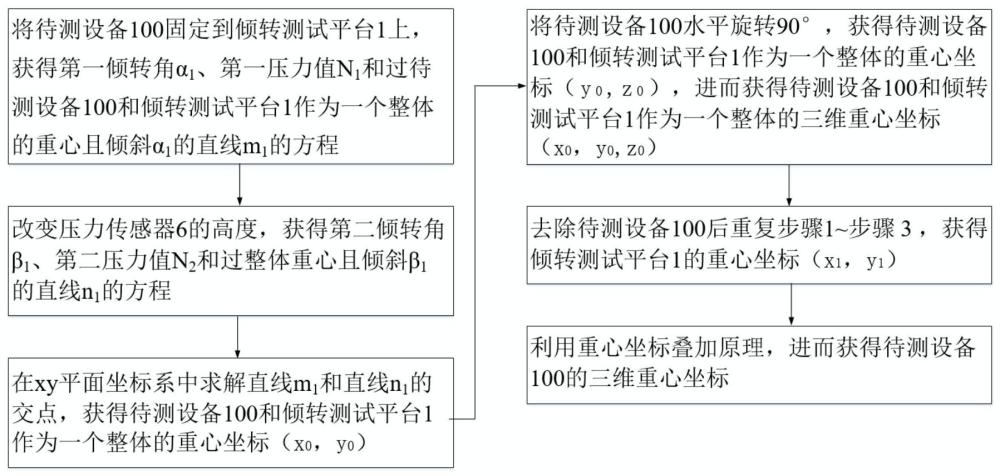
3、步骤1:将待测设备固定到倾转测试平台上,获得第一倾转角α1、第一压力值n1和过待测设备和倾转测试平台作为整体的重心且倾斜α1的直线m1的方程;
4、步骤2:改变压力传感器的高度,获得第二倾转角β1、第二压力值n2和过待测设备和倾转测试平台作为整体的重心且倾斜β1的直线n1的方程;
5、步骤3:在xy平面坐标系中求解直线m1和直线n1的交点,获得待测设备和倾转测试平台作为一个整体的重心坐标(x0,y0);
6、步骤4:将待测设备水平旋转90°,重复步骤1和步骤2,获得待测设备和倾转测试平台作为一个整体的重心坐标(y0,z0),进而获得待测设备和倾转测试平台作为一个整体的三维重心坐标(x0,y0,z0)。
7、进一步地,所述步骤1中,所述待测设备和所述倾转测试平台作为一个整体绕水平轴转动。
8、进一步地,所述倾转测试平台为圆盘结构,并设于支撑架的圆孔中。
9、进一步地,所述步骤1中,在安放所述待测设备时,限制所述倾转测试平台和所述支撑架的相对运动,使所述倾转测试平台处于水平状态。
10、进一步地,所述步骤1中,所述待测设备安装后,所述倾转测试平台能够在所述圆孔内绕水平轴转动。
11、进一步地,所述步骤1中,直线m1的方程为x+b1/cosα1=y tanα1,其中b1为在倾转测试平台倾转α1角度下,待测设备和倾转测试平台作为一个整体的重心到倾转轴线的距离。
12、进一步地,所述步骤2中,直线n1的方程为x+b2/cosβ1=y tanβ1,其中b2为在倾转测试平台倾转β1角度下,待测设备和倾转测试平台作为一个整体的重心到倾转轴线的距离。
13、进一步地,所述步骤2中,所述压力传感器设于可调安装座上。
14、进一步地,还包括步骤5:去除待测设备后重复步骤1~步骤3,获得倾转测试平台的重心坐标(x1,y1)。
15、进一步地,还包括步骤6:利用重心坐标叠加原理,获得待测设备的三维重心坐标。
16、与现有技术相比,本发明至少可实现如下有益效果之一:
17、(1)本发明的重心测量方法,通过改变倾转测试平台和支撑架之间的相对转动方式,以及待测设备的安放位置,能够获得计算重心的相应数据,进而通过计算能够得到重型设备的重心,重型测量装置结构简单,测量方法操作方便,避免了采用悬挂法测量存在的安全风险以及降低了经济成本。
18、(2)本发明的重心测量方法,压力传感器设于可调安装座上,可调安装座设于安放架上,通过调节可调安装座的高度来改变压力传感器的高度,以获得倾转环在接触到压力传感器时的不同倾转角。
19、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种重型设备的重心测量方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的重型设备的重心测量方法,其特征在于,所述步骤1中,所述待测设备(100)和所述倾转测试平台(1)作为一个整体绕水平轴转动。
3.根据权利要求1所述的重型设备的重心测量方法,其特征在于,所述倾转测试平台(1)为圆盘结构,并设于支撑架(2)的圆孔(23)中。
4.根据权利要求3所述的重型设备的重心测量方法,其特征在于,所述步骤1中,在安放所述待测设备(100)时,限制所述倾转测试平台(1)和所述支撑架(2)的相对运动,使所述倾转测试平台(1)处于水平状态。
5.根据权利要求3所述的重型设备的重心测量方法,其特征在于,所述步骤1中,所述待测设备(100)安装后,所述倾转测试平台(1)能够在所述圆孔(23)内绕水平轴转动。
6.根据权利要求1-5任一项所述的重型设备的重心测量方法,其特征在于,所述步骤1中,直线m1的方程为x+b1/cosα1=y tan α1,其中b1为在倾转测试平台(1)倾转α1角度下,待测设备(100)和倾转测试平台(1)作为一个整体的重心到倾转轴线的距离。
7.根据权利要求1-5任一项所述的重型设备的重心测量方法,其特征在于,所述步骤2中,直线n1的方程为x+b2/cosβ1=y tan β1,其中b2为在倾转测试平台(1)倾转β1角度下,待测设备(100)和倾转测试平台(1)作为一个整体的重心到倾转轴线的距离。
8.根据权利要求1-5任一项所述的重型设备的重心测量方法,其特征在于,所述步骤2中,所述压力传感器(6)设于可调安装座上。
9.根据权利要求1-5任一项所述的重型设备的重心测量方法,其特征在于,还包括步骤5:去除待测设备(100)后重复步骤1~步骤3,获得倾转测试平台(1)的重心坐标(x1,y1)。
10.根据权利要求9所述的重型设备的重心测量方法,其特征在于,还包括步骤6:利用重心坐标叠加原理,获得待测设备(100)的三维重心坐标。
技术总结
本发明涉及一种重型设备的重心测量方法,属于重心测量技术领域。本发明包括步骤1:将待测设备固定到倾转测试平台上,获得第一倾转角α<subgt;1</subgt;、第一压力值N<subgt;1</subgt;和过待测设备和倾转测试平台作为整体的重心且倾斜α<subgt;1</subgt;的直线m<subgt;1</subgt;的方程;步骤2:改变压力传感器的高度,获得第二倾转角β<subgt;1</subgt;、第二压力值N<subgt;2</subgt;和过待测设备和倾转测试平台作为整体的重心且倾斜β<subgt;1</subgt;的直线n<subgt;1</subgt;的方程;步骤3:在xy平面坐标系中求解直线m<subgt;1</subgt;和直线n<subgt;1</subgt;的交点,获得待测设备和倾转测试平台作为整体的重心坐标(x<subgt;0</subgt;,y<subgt;0</subgt;);步骤4:将待测设备水平旋转90°,重复步骤1和步骤2,获得待测设备和倾转测试平台作为整体的重心坐标(y<subgt;0</subgt;,z<subgt;0</subgt;),进而获得待测设备和倾转测试平台作为整体的重心坐标(x<subgt;0</subgt;,y<subgt;0</subgt;,z<subgt;0</subgt;)。
技术研发人员:丁念,刘培志,胡雄文,赵东阳,徐玉国,刘永辉,张文尚,李凯,孙力,刘志超,徐洋,张一凡,余凌晶,成佳艺,马开平,曹华峰,刘新国,张君,樊莹,苏周前
受保护的技术使用者:中兵无人机研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!