一种多传感器标定方法、系统、存储介质和移动平台与流程
本发明涉及一种移动平台领域,特别是涉及一种多传感器标定方法、系统、存储介质和移动平台。
背景技术:
1、智能汽车传感器在产线标定后,需时常校验传感器外参,以保证环境感知和定位模块提供高精度的障碍物和自车位置信息。当前的传感器校验方式较依赖传感器自身数据,例如相机的图像和激光雷达的点云等。这些传感器数据量巨大,在计算过程中占用巨大的计算资源,另外此类方法在传感器外参校验过程中,对场景依赖性较高,部分需借助外物如标定板等,这些给传感器外参校验带来巨大的不便。
技术实现思路
1、本发明的目的在于提出一种减少计算量,减少对环境和场景的依赖性的多传感器标定方法、系统、存储介质和移动平台。
2、为了实现上述目的,本发明采用了如下技术方案:
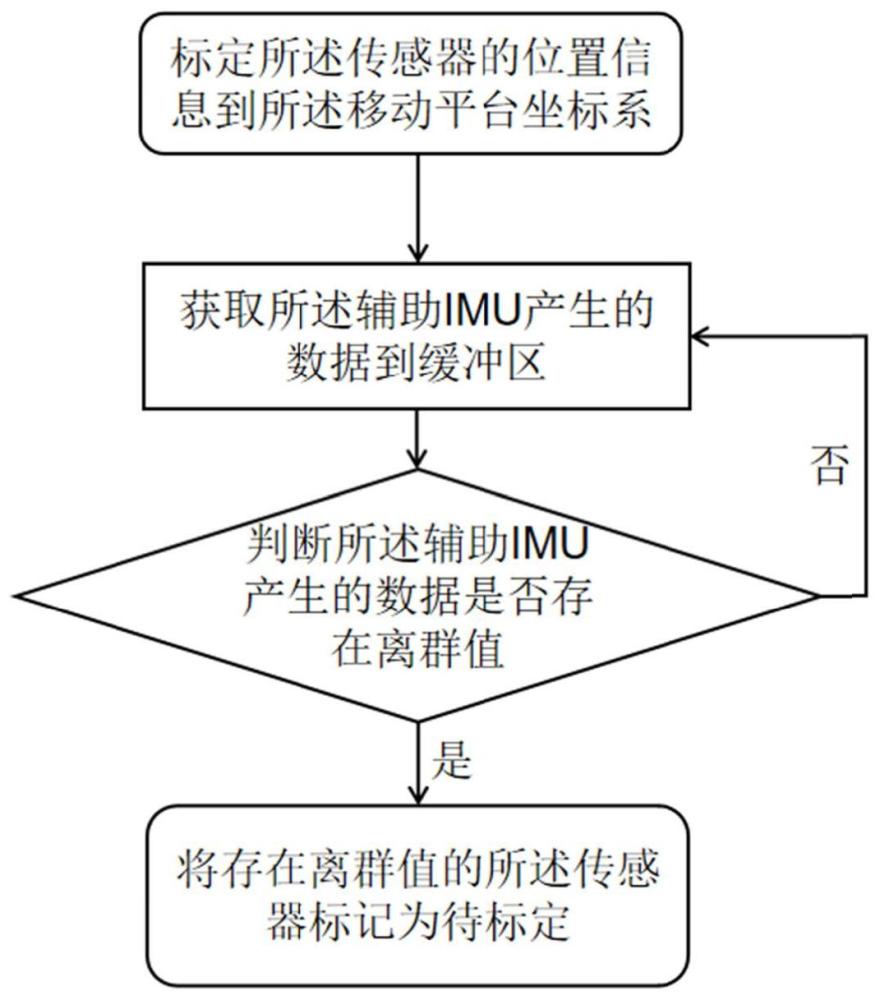
3、一种多传感器标定方法,通过辅助imu单元标定传感器在移动平台上的位置信息,包括以下步骤:
4、标定所述传感器的位置信息到所述移动平台坐标系;
5、获取所述辅助imu单元产生的数据到缓冲区;
6、判断所述辅助imu单元产生的数据是否存在离群值,如果是,则将存在离群值的所述辅助imu单元对应的所述传感器标记为待标定,如果否,则重新获取所述辅助imu单元产生的数据到缓冲区。
7、更进一步地,获取所述辅助imu单元数据中的加速度数据。
8、更进一步地,所述辅助imu单元的所述加速度数据为重力加速度数据g在所述辅助imu单元的所述加速度数据中存在分量gimu,则所述重力加速度数据g在所述移动平台坐标系下的分量为所述辅助imu单元在所述移动平台坐标系下的加速度数据为
9、
10、更进一步地,包括至少三个所述辅助imu单元,记录至少三个所述辅助imu单元在所述移动平台坐标系下的所述加速度数据的平均值到缓冲区,并计算每两个所述辅助imu单元在所述移动平台坐标系下所述加速度数据的所述平均值之间的差值,得到如下结果:
11、
12、
13、
14、更进一步地,判断每两个所述辅助imu单元的所述加速度数据的所述平均值之间的差值是否大于阈值ε,如果大于所述阈值ε,则判定为存在所述离群值。
15、更进一步地,将存在所述离群值的所述辅助imu单元对应的所述传感器标记为待标定传感器,并对所述待标定传感器进行再标定。
16、一种存储介质,所述存储介质上存储计算机程序,所述计算机程序执行上述的多传感器标定方法。
17、一种多传感器标定系统,安装在移动平台上,包括:
18、移动平台计算单元,所述移动平台计算单元包括存储介质;
19、辅助imu单元,用于实时获取所述移动平台的加速度数据,并存储到所述移动平台计算单元的所述存储介质内;和
20、传感器,用于实时获取道路环境信息,并存储到所述移动平台计算单元的所述存储介质内;
21、其中,所述移动平台计算单元用于读取、存储和计算所述辅助imu单元获取所述移动平台的加速度数据和所述传感器获取道路环境信息,并执行计算结果。
22、更进一步地,包括至少三个所述辅助imu单元和至少三个所述传感器,每一所述辅助imu单元和每一所述传感器对应绑定设置,且不同的所述辅助imu单元和所述传感器位置互不相同。
23、一种移动平台,应用上述的多传感器标定方法,或包括上述的存储介质,或包括上述的多传感器标定系统中的至少一种。
24、本发明通过所述辅助imu单元的所述加速度数据对所述传感器进行标定,不依赖所述传感器本身数据,整体数据处理量小,计算简单,有效的降低了所述传感器标定时对环境的依赖性。
技术特征:
1.一种多传感器标定方法,通过辅助imu单元标定传感器在移动平台上的位置信息,其特征在于,包括以下步骤:
2.如权利要求1所述的多传感器标定方法,其特征在于,获取所述辅助imu单元产生的数据中的加速度数据。
3.如权利要求2所述的多传感器标定方法,其特征在于,所述辅助imu单元的所述加速度数据为重力加速度数据g在所述辅助imu单元的所述加速度数据中存在分量gimu,则所述重力加速度数据g在所述移动平台坐标系下的分量为所述辅助imu单元在所述移动平台坐标系下的加速度数据为
4.如权利要求3所述的多传感器标定方法,其特征在于,包括至少三个所述辅助imu单元,记录至少三个所述辅助imu单元在所述移动平台坐标系下的所述加速度数据的平均值到缓冲区,并计算每两个所述辅助imu单元在所述移动平台坐标系下所述加速度数据的所述平均值之间的差值,得到如下结果:
5.如权利要求4所述的多传感器标定方法,其特征在于,判断每两个所述辅助imu单元的所述加速度数据的所述平均值之间的差值是否大于阈值ε,如果大于所述阈值ε,则判定为存在所述离群值。
6.如权利要求5所述的多传感器标定方法,其特征在于,将存在所述离群值的所述辅助imu单元对应的所述传感器标记为待标定传感器,并对所述待标定传感器进行再标定。
7.一种存储介质,其特征在于:所述存储介质上存储计算机程序,所述计算机程序执行如权利要求1-6任一项所述的多传感器标定方法。
8.一种多传感器标定系统,安装在移动平台上,其特征在于,包括:
9.如权利要求8所述的多传感器标定系统,其特征在于,包括至少三个所述辅助imu单元和至少三个所述传感器,每一所述辅助imu单元和每一所述传感器对应绑定设置,且不同的所述辅助imu单元和所述传感器位置互不相同。
10.一种移动平台,其特征在于,应用如权利要求1-6任一项所述的多传感器标定方法,或包括如权利要求7所述的存储介质,或包括如权利要求8或9所述的多传感器标定系统中的至少一种。
技术总结
一种多传感器标定方法、系统、存储介质和移动平台,通过辅助IMU单元标定传感器在移动平台上的位置信息,包括以下步骤:标定所述传感器的位置信息到所述移动平台坐标系;获取所述辅助IMU单元产生的数据到缓冲区;判断所述辅助IMU单元产生的数据是否存在离群值,如果是,则将存在离群值的所述辅助IMU单元对应的所述传感器标记为待标定,如果否,则重新获取所述辅助IMU单元产生的数据到缓冲区。本发明通过所述辅助IMU单元的所述加速度数据对所述传感器进行标定,不依赖所述传感器本身数据,整体数据处理量小,计算简单,有效的降低了所述传感器标定时对环境的依赖性。
技术研发人员:李文博,孙孟孟,邱科翔,贺天昊,栾承业
受保护的技术使用者:宁波路特斯机器人有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!