一种水下机器人对接过程中的导航定位方法及装置
涉及水下机器人导航定位,具体涉及一种水下机器人对接过程中的导航定位方法。
背景技术:
1、水下自主作业机器人是一种在水下环境中执行各种任务的自主机器人。这些任务可以包括水下勘测、水下打捞、水下救援等,其作业要求不断增加,需要更高的作业范围、作业时间、作业内容以及续航能力。为了满足这些要求,机器人通常需要定期返回到船上或充电平台上进行能源补充和信息交换。这些过程需要水下对接来完成,因此水下对接是机器人续航能力和工作能力的关键前提。
2、在水下机器人的自主对接过程中,了解自身位置、姿态和速度与对接装置的相对位置是至关重要的。对接实际上是通过调整机器人的位置、姿态、速度和角速度,以消除与对接装置之间的偏差。在进行水下对接时,涉及到多个关键因素,包括对接结构、流体干扰、导航定位和控制系统等。
3、从研究的角度来看,水下对接的最大挑战之一是定位技术。定位的准确性直接影响了控制系统的可行性和水下对接成功的可能性。在水下环境中,gps信号通常不可用,因此需要使用其他定位技术。常见的水下定位技术包括声纳定位、惯性导航系统、磁罗经定位、双目摄像机等。
4、双目摄像机是一种常用于水下机器人的传感器,用于获取相机图像数据。这些数据可以用于计算机视觉任务,如目标识别、障碍物避障和定位。然而,双目摄像机测量的数据通常需要与其他传感器数据进行融合,以提高定位的准确性和可靠性。
5、数据融合的方式主要分为紧耦合和松耦合两种方法:
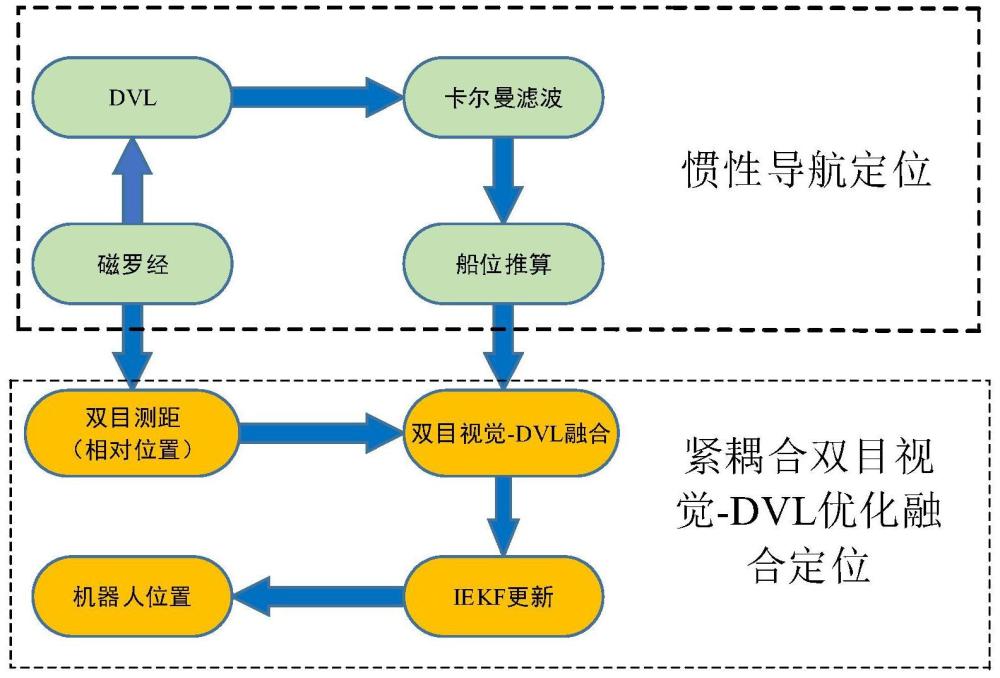
6、紧耦合:在紧耦合方法中,双目摄像机测量的数据与惯性导航系统(如dvl)得到的数据一起构成一个状态向量,并构建观测方程。然后,使用滤波方法(如卡尔曼滤波)或优化方法对这些数据进行融合,以估计机器人的位置和姿态。这种方法将不同传感器的数据紧密耦合在一起,可以实现更精确的定位。
7、松耦合:在松耦合方法中,双目摄像机测量的数据和惯性导航系统的数据分别用于位置和姿态的估计。这两个估计是独立的,然后在后续步骤中对它们进行融合。这种方法相对更简单,但可能会牺牲一些精度。
8、不论使用哪种融合方式,都需要考虑水下环境中的特殊挑战,如水下光照不均匀、水流影响和水下物体的形状变化。因此,水下导航定位是水下对接的关键技术之一,需要不断的研究和改进,以确保水下机器人能够安全、准确地完成对接任务,从而实现其各种水下作业任务的成功执行。
9、对于滤波方法,学术界通常采用卡尔曼滤波、扩展卡尔曼滤波与粒子滤波等滤波方法进行机器人定位的优化,在实际过程中,由于观测量的不断增加,会导致系统的运算复杂度急剧增加,所以利用扩展卡尔曼滤波的slam系统在过程中具有很强的实用性,但扩展卡尔曼滤波只考虑相邻的两个时刻的位置姿态差异,没有考虑到历史信息的影响,所以其定位精度受到线性化误差的影响。
技术实现思路
1、为解决现有技术中存在的,对于滤波方法,学术界通常采用卡尔曼滤波、扩展卡尔曼滤波与粒子滤波等滤波方法进行机器人定位的优化,在实际过程中,由于观测量的不断增加,会导致系统的运算复杂度急剧增加,所以利用扩展卡尔曼滤波的slam系统在过程中具有很强的实用性,但扩展卡尔曼滤波只考虑相邻的两个时刻的位置姿态差异,没有考虑到历史信息的影响,所以其定位精度受到线性化误差的影响的技术问题,本发明提供的技术方案为:
2、一种水下机器人对接过程中的导航定位方法,所述方法包括:
3、采集水下机器人相对于预设参考点的参考速度,并根据所述参考速度得到所述水下机器人在水下对接过程中,单位时间内的相对位移的步骤;
4、采集所述单位时间的两端时刻下,所述水下机器人的位置,根据所述两端时刻下的位置,得到所述水下机器人在所述单位时间内,惯性坐标系下的双目摄像机所测得位移的步骤;
5、根据所述相对位移和双目摄像机所测得位移,得到所述水下机器人在所述单位时间内的位置的步骤。
6、进一步,提供一个优选实施方式,所述单位时间内的相对位移根据多普勒测速仪对所述参考速度进行积分得到。
7、进一步,提供一个优选实施方式,所述两端时刻下的位置,通过双目摄像机得到。
8、进一步,提供一个优选实施方式,通过所述两端时刻下,对接口特种光源在所述双目摄像机的双目坐标系下的位置,通过坐标系转换得到水下机器人在惯性坐标系下的位移。
9、进一步,提供一个优选实施方式,通过优化方法,对所述相对位移和双目摄像机所测得位移进行融合,得到所述水下机器人在所述单位时间内的位置。
10、进一步,提供一个优选实施方式,所述预设参考点为海底。
11、进一步,提供一个优选实施方式,得到所述相对位移的过程中,所述水下机器人的姿态通过磁罗经得到。
12、基于同一发明构思,本发明提供了一种水下机器人对接过程中的导航定位装置,所述装置包括:
13、采集水下机器人相对于预设参考点的参考速度,并根据所述参考速度得到所述水下机器人在水下对接过程中,单位时间内的相对位移的模块;
14、采集所述单位时间的两端时刻下,所述水下机器人的位置,根据所述两端时刻下的位置,得到所述水下机器人在所述单位时间内,惯性坐标系下的双目摄像机所测得位移的模块;
15、根据所述相对位移和双目摄像机所测得位移,得到所述水下机器人在所述单位时间内的位置的模块。
16、基于同一发明构思,本发明提供了计算机储存介质,用于储存计算机程序,当所述计算机程序被计算机读取时,所述计算机执行所述的方法。
17、基于同一发明构思,本发明提供了计算机,包括处理器和储存介质,当所述储存介质中储存的计算机程序被处理器读取时,所述计算机执行所述的方法。
18、与现有技术相比,本发明提供的技术方案的有益之处在于:
19、本发明提供的一种水下机器人对接过程中的导航定位方法,解决了水下机器人水下对接过程中,水下机器人导航定位系统选取船位推算定位与双目视觉定位,双目视觉定位测量频率低的问题。
20、本发明提供的一种水下机器人对接过程中的导航定位方法,解决了由于双目测距过程中双目摄像机重投影误差与dvl积分过程中累计测量误差导致的定位误差的问题,可以减少线性化误差。
21、本发明提供的一种水下机器人对接过程中的导航定位方法,利用双目视觉重投影误差以及dvl磁罗经船位推算误差设计目标优化函数,通过最小化目标函数获得最优的状态变量,增加了定位的实时性与精确度。
22、适合应用于水下机器人对接过程中的导航定位的工作中。
技术特征:
1.一种水下机器人对接过程中的导航定位方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种水下机器人对接过程中的导航定位方法,其特征在于,所述单位时间内的相对位移根据多普勒测速仪对所述参考速度进行积分得到。
3.根据权利要求1所述的一种水下机器人对接过程中的导航定位方法,其特征在于,所述两端时刻下的位置,通过双目摄像机得到。
4.根据权利要求3所述的一种水下机器人对接过程中的导航定位方法,其特征在于,通过所述两端时刻下,对接口特种光源在所述双目摄像机的双目坐标系下的位置,通过坐标系转换得到水下机器人在惯性坐标系下的位移。
5.根据权利要求1所述的一种水下机器人对接过程中的导航定位方法,其特征在于,通过优化方法,对所述相对位移和双目摄像机所测得位移进行融合,得到所述水下机器人在所述单位时间内的位置。
6.根据权利要求1所述的一种水下机器人对接过程中的导航定位方法,其特征在于,所述预设参考点为海底。
7.根据权利要求1所述的一种水下机器人对接过程中的导航定位方法,其特征在于,得到所述相对位移的过程中,所述水下机器人的姿态通过磁罗经得到。
8.一种水下机器人对接过程中的导航定位装置,其特征在于,所述装置包括:
9.计算机储存介质,用于储存计算机程序,其特征在于,当所述计算机程序被计算机读取时,所述计算机执行权利要求1所述的方法。
10.计算机,包括处理器和储存介质,其特征在于,当所述储存介质中储存的计算机程序被处理器读取时,所述计算机执行权利要求1所述的方法。
技术总结
一种水下机器人对接过程中的导航定位方法及装置,涉及水下机器人导航定位技术领域。为解决现有技术中存在的,进行机器人定位时,定位精度受到线性化误差的影响的技术问题,本发明提供的技术方案为:一种水下机器人对接过程中的导航定位方法,方法包括:采集水下机器人相对于预设参考点的参考速度,并根据参考速度得到水下机器人在水下对接过程中,单位时间内的相对位移;采集单位时间的两端时刻下,水下机器人的位置,根据两端时刻下的位置,得到水下机器人在单位时间内,惯性坐标系下的双目摄像机所测得位移;根据相对位移和双目摄像机所测得位移,得到水下机器人在单位时间内的位置。适合应用于水下机器人对接过程中的导航定位的工作中。
技术研发人员:黄海,张云飞,周浩,郭腾,韩鑫悦,张灵琦,张宗羽,李凌宇,卞鑫宇,孙溢泽,王兆群
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!