目标探测方法、装置、雷达及介质与流程
本公开的实施方式涉及雷达,更具体地,本公开的实施方式涉及目标探测方法、装置、雷达及介质。
背景技术:
1、本部分旨在为本公开的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
2、随着社会和科技的发展,雷达目标探测技术,在生活中的应用逐渐广泛。毫米波雷达具有全天时全天候的工作能力,因此被广泛的应用于智能驾驶、交通、安防等领域。
3、相关技术中,毫米波雷达在进行目标探测时存在一些问题,如以车载前向毫米波雷达为例,车载前向毫米波雷达需要探测前方目标障碍物,实现自动紧急刹车(autonomousemergency bra-king system,aeb),自适应巡航(adaptive cruise control,acc)等功能。但是雷达对行人,水泥墩,锥桶等弱反射目标探测距离近,难以满足使用需求。
4、因此,如何提升雷达对弱目标的探测距离成为一个急需解决的问题。
技术实现思路
1、本公开提供一种目标探测方法、装置、雷达及介质,以提升雷达对弱目标的探测距离。
2、在本公开实施方式的第一方面中,提供了一种目标探测方法,包括:
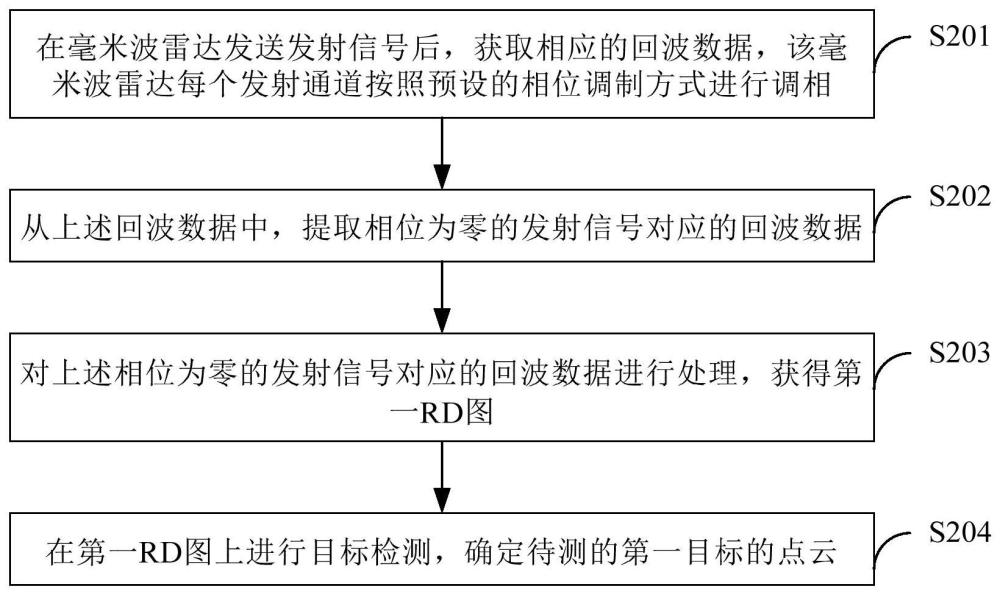
3、在毫米波雷达发送发射信号后,获取相应的回波数据,其中,所述毫米波雷达每个发射通道按照预设的相位调制方式进行调相;
4、从所述回波数据中,提取相位为零的发射信号对应的回波数据;
5、对所述相位为零的发射信号对应的回波数据进行处理,获得第一距离-多普勒(range-doppler,rd)图;rd图表征待测的目标的距离和速度;
6、在所述第一rd图上进行目标检测,确定待测的第一目标的点云。
7、在本公开的一个实施例中,所述预设的相位调制方式包括所述每个发射通道的每一发射信号在其前一个发射信号的相位上增加预设相位,其中,所述预设相位基于所述毫米波雷达的发射通道的个数和子带的个数确定。
8、在本公开的一个实施例中,所述在毫米波雷达发送发射信号后,还包括:
9、确定所述每个发射通道的发射相位;
10、根据所述每个发射通道按照所述预设的相位调制方式进行调相的相位,与所述每个发射通道的发射相位的相位差,获得所述每个发射通道对应的补偿相位;
11、根据所述每个发射通道对应的补偿相位,对所述每个发射通道进行相位校准。
12、在本公开的一个实施例中,所述第一rd图为非相参rd图;
13、所述对所述相位为零的发射信号对应的回波数据进行处理,获得第一rd图,包括:
14、对所述相位为零的发射信号对应的回波数据进行下变频和滤波后采样,得到中频回波信号;
15、对所述中频回波信号进行一维快速傅里叶变换(1d fast fourier transform,1dfft)和二维快速傅里叶变换(2d fast fourier transform,2dfft),得到所述毫米波雷达每个接收通道对应的rd图;
16、对所述每个接收通道对应的rd图进行非相参积累,得到所述非相参rd图。
17、在本公开的一个实施例中,所述在所述第一rd图上进行目标检测,确定待测的第一目标的点云,包括:
18、对所述第一rd图的每一行,分别计算当前检测单元的左侧邻近若干单元与右侧邻近若干单元的能量平均值,基于所述能量平均值设置门限;
19、若当前检测单元的能量值大于或等于所述门限,则确定当前检测单元是目标单元,记录所述目标单元的位置,根据从所述第一rd图中确定的各个目标单元和各个目标单元的位置,获得所述待测的第一目标的点云。
20、在本公开的一个实施例中,在毫米波雷达发送发射信号后,获取相应的回波数据之后,还包括:
21、对所述回波数据进行处理,获得第二rd图;
22、在所述第二rd图上进行目标检测,确定待测的第二目标的点云;
23、将所述待测的第一目标的点云和所述待测的第二目标的点云,进行融合,获得融合的目标点云。
24、在本公开的一个实施例中,所述在所述第二rd图上进行目标检测,确定待测的第二目标的点云,包括:
25、根据所述第二rd图,确定所述毫米波雷达真实的子带;
26、对所述毫米波雷达真实的子带进行目标检测,确定待测的第二目标的点云。
27、在本公开的一个实施例中,所述将所述待测的第一目标的点云和所述待测的第二目标的点云,进行融合,获得融合的目标点云,包括:
28、基于所述待测的第一目标的点云和所述待测的第二目标的点云,确定处于同一位置的点;
29、对于处于同一位置的点,若有多个,则保留一个;
30、根据处于同一位置保留的点,以及所述待测的第一目标的点云和所述待测的第二目标的点云中除所述处于同一位置的点外剩余的点,获得融合的目标点云。
31、在本公开的一个实施例中,所述预设相位根据表达式:
32、确定;
33、其中,wk表示所述预设相位,k=1,2,......,nt,nt表示所述毫米波雷达的发射通道的个数,n表示所述子带的个数。
34、在本公开实施方式的第二方面中,提供一种目标探测装置,包括:
35、获取模块,用于在毫米波雷达发送发射信号后,获取相应的回波数据,其中,所述毫米波雷达每个发射通道按照预设的相位调制方式进行调相。
36、提取模块,用于从所述回波数据中,提取相位为零的发射信号对应的回波数据。
37、处理模块,用于对所述相位为零的发射信号对应的回波数据进行处理,获得第一rd图;rd图表征待测的目标的距离和速度。
38、检测模块,用于在所述第一rd图上进行目标检测,确定待测的第一目标的点云。
39、在本公开实施方式的第三方面,提供了一种毫米波雷达,包括:发射组件、接收组件和处理器;
40、其中,所述发射组件用于发射毫米波信号,所述接收组件用于接收回波信号,所述处理器用于执行如第一方面提供的方法。
41、在本公开实施方式的第四方面中,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如第一方面提供的方法。
42、在本公开实施方式中,在毫米波雷达每个发射通道按照预设的相位调制方式进行调相,并发射信号后,获取相应的回波数据,之后,从回波数据中,提取相位为零的发射信号对应的回波数据,由于相位为零的发射信号指向0度,形成发射波束窄,因此得到相位为零的发射信号形成的窄发射波束对应的回波数据,提高了雷达增益,进而,对上述相位为零的发射信号对应的回波数据进行处理,获得第一rd图,并在第一rd图上进行目标检测,确定待测的目标的点云。其中,由于提高了雷达增益,从而能够提高对弱目标的探测距离,尽早探测到弱目标,满足使用需求,方便后续实现aeb、acc等功能。
- 还没有人留言评论。精彩留言会获得点赞!