十参数三轴磁传感器标定方法和装置
本技术属于传感器校准,尤其涉及一种十参数三轴磁传感器标定方法和装置。
背景技术:
1、在使用磁传感器之前,需要进行误差补偿,对磁传感器进行校准;相关技术中,常用的磁传感器校准的方法主要有:罗差法、简单标定算法和椭球拟合;但是罗差法需要外部航向基准信息的辅助;简单标定算法精度较低;椭球拟合操作繁琐,且用户校准后无法得知校准效果,降低了用户体验的舒适性。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种十参数三轴磁传感器标定方法和装置,对三轴磁力计测量模型进行参数标定,基于三轴磁力计测量模型和磁传感器数据求解标定的参数,即可进行校准,校准实施方便,无需外部航向基准信息的辅助,操作简单且校准精度与校准稳定性高。
2、第一方面,本技术提供了一种十参数三轴磁传感器标定方法,该方法包括:
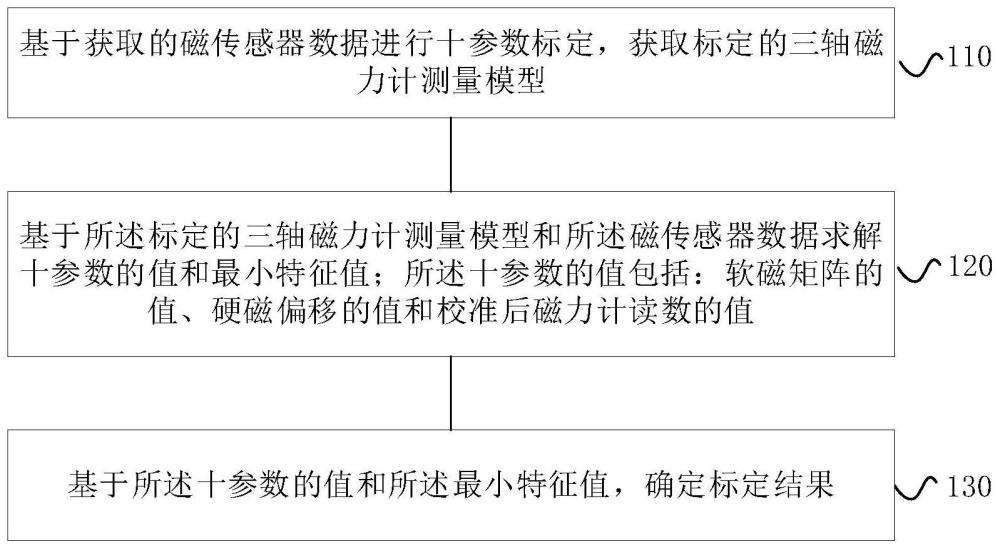
3、基于获取的磁传感器数据进行十参数标定,获取标定的三轴磁力计测量模型;
4、基于所述标定的三轴磁力计测量模型和所述磁传感器数据求解十参数的值和最小特征值;所述十参数的值包括:软磁矩阵的值、硬磁偏移的值和校准后磁力计读数的值;
5、基于所述十参数的值和所述最小特征值,确定标定结果。
6、根据本技术的十参数三轴磁传感器标定方法,通过对三轴磁力计测量模型进行标定,可以获得标定的三轴磁力计测量模型;基于标定的三轴磁力计测量模型和磁传感器数据可以求解十参数即软磁矩阵的值、硬磁偏移的值、校准后磁力计读数的值,以及最小特征值;无需外部航向基准信息的辅助,只需磁传感器数据即可进行校准,操作简单便捷;基于十参数的值和最小特征值可以获取标定结果,从而判断校准效果,可以提高校准的稳定性和精确性。
7、根据本技术的十参数三轴磁传感器标定方法,所述基于获取的磁传感器数据进行十参数标定,获取标定的三轴磁力计测量模型,包括:基于初始磁力计读数、所述校准后磁力计读数、所述软磁矩阵和所述硬磁偏移,构建三轴磁力计测量模型;
8、所述基于所述标定的三轴磁力计测量模型和所述磁传感器数据求解十参数的值和最小特征值,包括:
9、采用特征分解方法求解所述三轴磁力计测量模型,得到解向量,所述解向量为与所述最小特征值相关联的特征向量;
10、基于所述解向量,确定所述十参数的值。
11、根据本技术的十参数三轴磁传感器标定方法,所述三轴磁力计测量模型表示如下:
12、bp=wbc+v
13、其中,bp为所述初始磁力计读数;w为所述软磁矩阵;bc为所述校准后磁力计读数;v为所述硬磁偏移;所述软磁矩阵为对称矩阵,所述十参数的值包括:所述软磁矩阵对应的6个参数,所述硬磁偏移对应的3个参数以及所述校准后磁力计读数对应的参数。
14、根据本技术的十参数三轴磁传感器标定方法,所述采用特征分解方法求解所述三轴磁力计测量模型,得到解向量,包括:
15、基于第一转换参数对所述三轴磁力计测量模型进行转换,获取所述校准后磁力计读数对应的第一表达式,所述第一转换参数基于所述软磁矩阵得到;
16、基于所述第一表达式和各样本对应的测量序列,定义所述样本对应的误差残差;所述误差残差用于表征测量磁矢量平方模与当地磁场平方的差值;
17、基于多个所述样本对应的误差残差,定义第二表达式;
18、基于所述第二表达式和测量矩阵构建拟合公式;
19、采用所述特征分解方法求解所述拟合公式,得到所述解向量。
20、根据本技术的十参数三轴磁传感器标定方法,所述基于所述标定的三轴磁力计测量模型和所述磁传感器数据求解十参数的值和最小特征值,包括:
21、基于所述解向量和所述第二表达式,计算得到目标特征向量解对应的误差函数;
22、将最小的误差函数对应的值确定为所述最小特征值。
23、根据本技术的十参数三轴磁传感器标定方法,所述基于所述解向量,确定所述十参数的值,包括:
24、基于所述解向量,计算得到所述硬磁偏移的值和所述软磁矩阵的值;
25、基于所述硬磁偏移的值、所述软磁矩阵的值和所述初始磁力计读数,计算得到所述校准后磁力计读数的值。
26、根据本技术的十参数三轴磁传感器标定方法,所述基于所述十参数的值和所述最小特征值,确定标定结果,包括:
27、基于所述校准后磁力计读数、所述最小特征值和样本数量,确定拟合值;
28、基于所述拟合值和目标阈值,确定所述标定结果。
29、根据本技术的十参数三轴磁传感器标定方法,所述基于所述校准后磁力计读数、所述最小特征值和样本数量,确定拟合值,包括:
30、基于如下公式确定所述拟合值:
31、
32、其中,ε为拟合值;b0为所述校准后磁力计读数;βmin为所述最小特征值;n为所述样本数量。
33、根据本技术的十参数三轴磁传感器标定方法,在所述基于获取的磁传感器数据进行十参数标定,获取标定的三轴磁力计测量模型之前,所述方法还包括:
34、获取初始传感器数据;
35、使用加速度计数据映射方式将所述初始传感器数据均匀存储在二维矩阵中,获取所述磁传感器数据。
36、第二方面,本技术提供了一种十参数三轴磁传感器标定装置,该装置包括:
37、第一处理模块,用于基于获取的磁传感器数据进行十参数标定,获取标定的三轴磁力计测量模型;
38、第二处理模块,用于基于所述标定的三轴磁力计测量模型和所述磁传感器数据求解十参数的值和最小特征值;所述十参数的值包括:软磁矩阵的值、硬磁偏移的值和校准后磁力计读数的值;
39、第三处理模块,用于基于所述十参数的值和所述最小特征值,确定标定结果。
40、根据本技术的十参数三轴磁传感器标定装置,通过对三轴磁力计测量模型进行标定,可以获得标定的三轴磁力计测量模型;基于标定的三轴磁力计测量模型和磁传感器数据可以求解十参数即软磁矩阵的值、硬磁偏移的值、校准后磁力计读数的值,以及最小特征值;无需外部航向基准信息的辅助,只需磁传感器数据即可进行校准,操作简单便捷;基于十参数的值和最小特征值可以获取标定结果,从而判断校准效果,可以提高校准的稳定性和精确性。
41、根据本技术的十参数三轴磁传感器标定装置,所述第一处理模块,还用于:基于初始磁力计读数、所述校准后磁力计读数、所述软磁矩阵和所述硬磁偏移,构建三轴磁力计测量模型;
42、所述第二处理模块,还用于:
43、采用特征分解装置求解所述三轴磁力计测量模型,得到解向量,所述解向量为与所述最小特征值相关联的特征向量;
44、基于所述解向量,确定所述十参数的值。
45、根据本技术的十参数三轴磁传感器标定装置,还包括第四处理模块,用于:
46、在所述基于获取的磁传感器数据进行十参数标定,获取标定的三轴磁力计测量模型之前,获取初始传感器数据;
47、使用加速度计数据映射方式将所述初始传感器数据均匀存储在二维矩阵中,获取所述磁传感器数据。
48、根据本技术的十参数三轴磁传感器标定装置,所述第二处理模块,还用于:
49、基于第一转换参数对所述三轴磁力计测量模型进行转换,获取所述校准后磁力计读数对应的第一表达式,所述第一转换参数基于所述软磁矩阵得到;
50、基于所述第一表达式和各样本对应的测量序列,定义所述样本对应的误差残差;所述误差残差用于表征测量磁矢量平方模与当地磁场平方的差值;
51、基于多个所述样本对应的误差残差,定义第二表达式;
52、基于所述第二表达式和测量矩阵构建拟合公式;
53、采用所述特征分解装置求解所述拟合公式,得到所述解向量。
54、根据本技术的十参数三轴磁传感器标定装置,所述第二处理模块,还用于:
55、基于所述解向量和所述第二表达式,计算得到目标特征向量解对应的误差函数;
56、将最小的误差函数对应的值确定为所述最小特征值。
57、根据本技术的十参数三轴磁传感器标定装置,所述第二处理模块,还用于:
58、基于所述解向量,计算得到所述硬磁偏移的值和所述软磁矩阵的值;
59、基于所述硬磁偏移的值、所述软磁矩阵的值和所述初始磁力计读数,计算得到所述校准后磁力计读数的值。
60、根据本技术的十参数三轴磁传感器标定装置,所述第三处理模块,还用于:
61、基于所述校准后磁力计读数、所述最小特征值和样本数量,确定拟合值;
62、基于所述拟合值和目标阈值,确定所述标定结果。
63、根据本技术的十参数三轴磁传感器标定装置,所述第三处理模块,还用于:
64、基于如下公式确定所述拟合值:
65、
66、其中,ε为拟合值;b0为所述校准后磁力计读数;βmin为所述最小特征值;n为所述样本数量。
67、第三方面,本技术提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的十参数三轴磁传感器标定方法。
68、第四方面,本技术提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的十参数三轴磁传感器标定方法。
69、第五方面,本技术提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的十参数三轴磁传感器标定方法。
70、本技术实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
71、通过对三轴磁力计测量模型进行标定,可以获得标定的三轴磁力计测量模型;基于标定的三轴磁力计测量模型和磁传感器数据可以求解十参数即软磁矩阵的值、硬磁偏移的值、校准后磁力计读数的值,以及最小特征值;无需外部航向基准信息的辅助,只需磁传感器数据即可进行校准,操作简单便捷;基于十参数的值和最小特征值可以获取标定结果,从而判断校准效果,可以提高校准的稳定性和精确性。
72、进一步地,通过二维矩阵存储磁传感器数据,使用加速度计数据映射的方式将初始传感器数据均匀的存储在二维矩阵中,从而达到较好的校准效果,提高校准精确性;此外二维矩阵实时运作,当磁场环境发生变化时,二维矩阵可以依据上述存储方式存储新的磁传感器数据,再次进行校准;当校准拟合值再次不大于目标阈值时,表示当前标定的三轴磁力计测量模型的十参数可以适应当前磁场环境,使得校准具有自适应学习的能力。
73、更进一步地,将三轴磁传感器测量模型通过第一转换参数进行转换可以得到第一表达式;通过定义误差残差,将误差残差展开并转化可以得到误差残差的矩阵形式;根据误差残差的矩阵形式可以定义解向量;通过定义第二表达式和测量矩阵可以构建拟合公式;通过拟合公式使用特征分解方法可以求解解向量,求解的解向量值可以为求解十参数提供数据支持,具有较高的计算精度和准确度。
74、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!