用于组合导航系统的提高水平陀螺零偏估计精度的方法与流程
本发明主要涉及到导航,特指一种用于组合导航系统的提高水平陀螺零偏估计精度的方法。
背景技术:
1、常规的ins/gnss构成的组合导航系统能够输出位置、速度、姿态信息。上述组合导航系统的原理是由惯性测量单元陀螺测量出角速度信息,以及加速度计测量出比力信息进行捷联惯性导航解算,然后由组合导航算法完成上述解算结果的修正。之所以需要修正,是因为经标定补偿后的陀螺器件以及加速度计器件仍存在残余零偏,而且上述零偏往往未知。
2、如果组合导航系统中外部位置、速度观测一直有效,比如卫星导航系统一直正常,则组合导航精度问题不显著。但是也往往存在卫星信号被干扰或被遮挡的情况,将导致卫星导航失效,组合导航系统失去了外部位置、速度观测则转入纯惯性导航。
3、纯惯性导航的位置精度主要与纯惯性导航的工作时间相关,短时纯惯性导航的定位精度即位置误差主要由初始位置误差、初始速度误差、初始姿态误差、惯性器件初始零偏误差等因素决定。具体来说,初始位置误差是常值,不随时间增长;位置误差相对初始速度误差是时间线性增长关系;位置误差相对初始姿态误差是时间二次方增长关系;位置误差相对初始陀螺零偏误差是时间三次方增长关系。如以下三式所示:
4、
5、
6、δp=δv·t
7、上式中,δp为位置误差(单位m),ε为陀螺零偏(单位rad/s),g0为当地重力加速度(单位m/s2),δψ为水平姿态误差(单位rad),δv为速度误差(单位m/s),t为纯惯性导航时间(单位s)。
8、因此在转入纯惯性导航前的组合导航阶段如果能够得到高精度的位置、速度、姿态,同时还尽可能的准确估计出陀螺、加速度计零偏,则在转入纯惯性导航后就能够保持较高的纯惯性导航位置、姿态精度。其原理是在转入纯惯性导航后扣除上述准确估计出的陀螺、加速度计零偏,等效于得到了更高精度的角速度以及比力测量值。进一步,卫星拒止前的组合导航转入卫星拒止后的纯惯性导航场景中(后续称之为交接班时刻),imu惯性器件的零偏估计精度很大程度上直接决定了后续纯惯性导航的精度。这包括两个方面:(1)交接班时刻的姿态精度取决于水平加速度计零偏估计精度,如前述所述,后续纯惯性导航位置误差与交接班时刻的初始水平姿态误差是时间二次方增长关系。(2)交接班时刻水平陀螺的残余零偏造成的后续纯惯性导航位置误差随时间是三次方增长关系。因此交接班时刻之前的组合导航对于水平陀螺以及水平加速度计零偏估计的越精确,则后续转入纯惯性导航后的位置精度越高。
9、为了得到imu惯性器件零偏的高精度估计,往往需要在充分机动条件下进行传递对准或者组合导航,机动的目的是增加可观性,其缺点是显而易见的:
10、(1)传递对准而言,增加了载机的高精度主惯导要求,即无高精度主惯导情况下就无法做传递对准;或者即使载机有高精度主惯导,传递对准所需要的机动条件也是有一定要求的。
11、(2)对于通过组合导航实现imu零偏的高精度估计,则需要一系列特殊条件的机动,至少匀速直线运动的组合导航可观性是很弱的。
12、基于上述缺点(1):从技术角度来说,传递对准是发生在主、子惯导之间,即高精度的主惯导将位置、速度、姿态信息传递给低精度的子惯导,同时低精度的子惯导完成惯性器件的零偏估计等工作。基于可观性的分析,完成上述传递对准要求实施一系列机动条件,如s机动(激励出航向变化)以及振翅机动(激励出滚转角度变化)等。换句话说,如果运动机动不充分,传递对准的效果就会很差。
13、基于上述缺点(2):在位置、速度组合只有6维观测量而且匀速直线运动的情况下,陀螺零偏:只有北向陀螺可观。加表零偏:只有天向可观。在位置、速度、双天线航向组合只有7维观测量而且匀速直线运动的情况下,仅仅增加了航向陀螺的可观性。
14、上述两种情况代表了大多数典型的组合导航系统,在上述水平陀螺以及水平加速度计零偏弱可观性的情况下,往往需要实施各种机动来增加可观性。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种原理简单、实施简便、能够大幅提高精度的用于组合导航系统的提高水平陀螺零偏估计精度的方法。
2、为解决上述技术问题,本发明采用以下技术方案:
3、一种用于组合导航系统的提高水平陀螺零偏估计精度的方法,其包括:
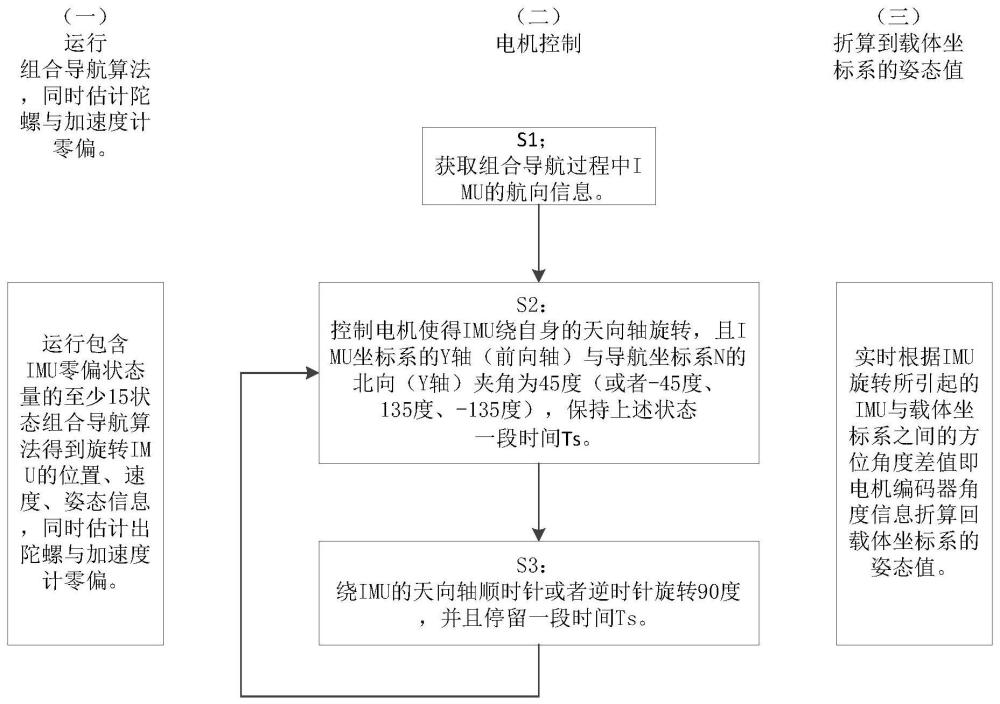
4、运行组合导航算法,同时估计陀螺与加速度计零偏;
5、电机控制:获取组合导航过程中惯性测量单元imu的航向信息,控制电机使得惯性测量单元imu旋转;
6、获取到载体坐标系的姿态值,实时根据惯性测量单元imu旋转所引起的惯性测量单元imu与载体坐标系之间的方位角度差值即电机编码器角度信息折算回载体坐标系的姿态值。
7、作为本发明方法的进一步改进:所述运行组合导航算法、电机控制及获取到载体坐标系的姿态值这三个控制策略均为同步、并行处理。
8、作为本发明方法的进一步改进:采用运行带imu零偏状态量的至少15状态组合导航算法得到旋转imu的位置、速度、姿态信息,同时估计出陀螺零偏与加速度计的零偏。
9、作为本发明方法的进一步改进:在进行电机控制的具体流程包括:
10、步骤s1:获取组合导航过程中惯性测量单元imu的航向信息;
11、步骤s2:控制电机使得惯性测量单元imu绕自身的天向轴旋转,且imu坐标系的y轴与导航坐标系n的北向夹角为45度或者-45度、或者135度、或者-135度,保持上述状态一段时间ts;
12、步骤s3:绕惯性测量单元imu的天向轴顺时针或者逆时针旋转90度,并且停留一段时间ts;
13、步骤s4:不断重复上述步骤s2、s3。
14、作为本发明方法的进一步改进:所述惯性测量单元imu包括三轴正交安装的陀螺以及三轴正交安装的加速度计。
15、作为本发明方法的进一步改进:所述电机为角度编码型伺服电机,用于绕着惯性测量单元imu的天向轴旋转,使得惯性测量单元imu的前向轴与载体坐标系的前向轴之间实现任意的角度位置差,且包含零位与高精度的角度编码器。
16、作为本发明方法的进一步改进:还包括卫星信号接收天线,所述卫星信号接收天线为一个或两个,用来接收卫星导航信号,然后传输至卫星导航板卡。
17、作为本发明方法的进一步改进:还包括组合导航计算机板卡,用来采集所述惯性测量单元imu以及所述卫星导航板卡的数据,并且运行组合导航程序。
18、作为本发明方法的进一步改进:所述惯性测量单元imu安装在所述高精度角度编码型伺服电机之上,且惯性测量单元imu的天向轴与电机旋转轴平行;组合导航计算机板卡能够实时控制电机的转动与位置。
19、与现有技术相比,本发明的优点就在于:
20、1、本发明的用于组合导航系统的提高水平陀螺零偏估计精度的方法,原理简单、实施简便、能够大幅提高精度,能够在卫星拒止前的组合导航转入卫星拒止后的纯惯性导航场景这种交接班时刻,提高水平陀螺以及水平加速度计的零偏估计精度,从而获得高精度的水平姿态信息。
21、2、本发明的用于组合导航系统的提高水平陀螺零偏估计精度的方法,通过转动imu就可以增加水平陀螺零偏以及水平加速度计零偏的可观性,而不依赖于外部载体的机动,从而减少了进入纯惯性导航所必要的准备环节。进入纯惯性导航所必要的准备环节指的是为了获得高精度的纯惯性导航精度,往往需要载体姿态机动来实现对水平陀螺以及水平加速度计零偏的高精度估计,这势必增加载体额外的工作过程。
22、3、本发明的用于组合导航系统的提高水平陀螺零偏估计精度的方法,控制电机使得imu的s坐标系的y轴(前向轴)总是与导航坐标系n的北向夹角45度(或者-45度、135度、-135度),能够同时增加前向陀螺以及右向陀螺的零偏可观性。在对水平陀螺可观性分析以及仿真过程中发现,在未实施特殊机动即近似匀速直线运动的情况下,北向陀螺零偏具有可观性,而东向陀螺零偏不具有可观性。仿真分析还发现,如果imu的s坐标系的y轴(前向轴)与导航坐标系n的北向夹角45度(或者-45度、135度、-135度),则北向陀螺零偏与东向陀螺零偏同时都具有了可观性。
23、4、本发明的用于组合导航系统的提高水平陀螺零偏估计精度的方法,转位90度之后imu的s坐标系的y轴(前向轴)仍然与导航坐标系n的北向夹角45度(或者-45度、135度、-135度),同时保证了前述“北向陀螺零偏与东向陀螺零偏同时都具有了可观性”;而且在第一次转位后水平加速度计零偏能够迅速实现高精度的估计。
24、5、本发明的用于组合导航系统的提高水平陀螺零偏估计精度的方法,使得水平陀螺零偏实现高精度估计的所需时间相对其它方案最短,其原因是在初始位置时,指“imu的s坐标系的y轴(前向轴)与导航坐标系n的北向夹角45度(或者-45度、135度、-135度)”,北向陀螺零偏与东向陀螺零偏同时都具有了可观性,北向陀螺零偏与东向陀螺零偏估计值同时处于收敛过程。与之对比的其它方案中,比如初始位置为“imu的s坐标系的y轴(前向轴)与导航坐标系n的北向夹角为0度(或者180度)”,则仅仅是北向陀螺零偏具有可观性,而东向陀螺零偏不具有可观性,则北向陀螺零偏估计值处于收敛过程,而东向陀螺零偏估计值尚未进入收敛过程,需要借助转位机构在完成转位之后才开始进入收敛过程。上述所谓的估计值处于收敛过程指零偏的估计过程在向真值附近收敛。以一个典型的卡尔曼滤波器的零偏估计收敛时间3分钟为例,完成两个水平陀螺零偏估计收敛就需要6分钟时间,包含转位前北向陀螺零偏估计收敛过程需要3分钟,转位后原来的东向陀螺变成北向陀螺,其零偏估计收敛过程同样需要3分钟。而本方案首先转位在一个特定的夹角45度(或者-45度、135度、-135度),保证了北向陀螺零偏与东向陀螺零偏估计值同时处于收敛过程中,耗时需要同样的3分钟,在转位之后加速度计的零偏迅速收敛在真值附近,而水平陀螺的零偏在第一个3分钟已经收敛了一部分的情况下继续向真值附近收敛,总计消耗时间相比前述6分钟时间减少1分钟以上。
- 还没有人留言评论。精彩留言会获得点赞!