用于传感器的参数标定系统、方法及存储介质与流程
本发明涉及自动驾驶技术,并且具体地,涉及一种用于传感器的参数标定系统、方法及存储介质。
背景技术:
1、传感器是无人车自动驾驶系统中最为重要的部件之一,传感器提供的数据是保证无人驾驶模式下行车安全的根本条件。因此,传感器输出数据的精度极为重要。以激光雷达为例,其输出的三维点云信息中可以提取出可行驶安全区域的边界和障碍物的空间信息(尺寸、位置等),而车控及规划模块需要根据这些感知信息判定车辆目前行驶状态下是否有碰撞跌落风险,从而实时调整行车路线,并控制运动姿态。传感器产生的信息如果有偏差,轻则产生误检误判,使得车辆无故停车降低运营效率,重则漏检漏判造成安全事故,危害人身和设备安全。
技术实现思路
1、本发明的目的在于提出一种适用于矿山运营环境的用于传感器的参数标定系统、方法以及存储介质,其能够将无人驾驶矿车上的多个传感器标定在同一坐标系下,从而降低测量公差。
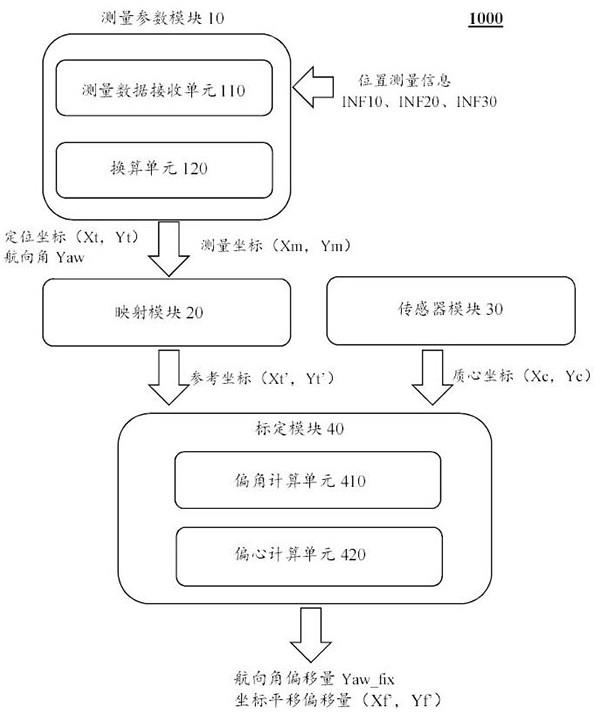
2、根据本发明的一方面, 提供了一种用于传感器的参数标定系统,所述传感器被安装在无人驾驶矿车上,其中所述参数标定系统包括:测量参数模块,所述测量参数模块被配置成接收至少两个标定物的位置测量信息,并换算成所述至少两个标定物在矿区地图坐标系下的测量坐标;映射模块,所述映射模块被配置成将所述标定物的测量坐标转换成车身坐标系下的坐标,以作为所述标定物的参考坐标;传感器模块,所述传感器模块被配置成获得所述传感器所感测的所述至少两个标定物的点云簇,并基于所述点云簇计算所述至少两个标定物在传感器坐标系下的质心坐标;以及标定模块,所述标定模块被配置成基于所述至少两个标定物的参考坐标和质心坐标,计算航向角偏移量和坐标平移偏移量作为所述传感器的标定参数。
3、可选地,所述标定模块包括偏角计算单元,所述偏角计算单元被配置成将所述至少两个标定物的质心坐标的连线与所述至少两个标定物的参考坐标的连线进行角度比对来获得所述航向角偏移量。
4、可选地,所述标定模块还包括偏心计算单元,所述偏心计算单元被配置成基于所述航向角偏移量,根据以下等式计算所述标定物的质心坐标的角度参数修正坐标:
5、xnew = xc×cos(yaw_fix)+ yc×sin(yaw_fix)
6、ynew = yc×cos(yaw_fix)- xc×sin(yaw_fix)
7、其中,(xc,yc)为标定物的质心坐标;(xnew,ynew)为标定物的角度参数修正坐标;yaw_fix为航向角偏移量,并且根据所述标定物的参考坐标和所述角度参数修正坐标获得所述坐标平移偏移量。
8、可选地,所述偏心计算单元被配置成根据以下等式计算所述标定物的参考坐标与所述角度参数修正坐标之间的平移差值:
9、xf =(xt’ - xnew)
10、yf =(yt’ - ynew)
11、其中,(xt’,yt’)为标定物的参考坐标;(xnew,ynew)为标定物的角度参数修正坐标;(xf,yf)为标定物的参考坐标与角度参数修正坐标的平移差值;并且计算至少两个标定物的所述平移差值的平均值作为所述坐标平移偏移量。
12、可选地,所述测量参数模块还被配置成接收所述无人驾驶矿车的车身的位置测量信息,并基于所述车身的位置测量信息获得所述车身在所述矿区地图坐标系下的定位坐标和航向角; 所述映射模块被配置成根据以下等式将所述标定物的测量坐标转换成车身坐标系下的参考坐标:
13、xt’ =(xm - xt)×cos(yaw)+(ym - yt)×sin(yaw)
14、yt’ =(ym - yt)×cos(yaw)-(xm - xt)×sin(yaw)
15、其中,(xm,ym)为标定物的测量坐标;(xt,yt)为车身的定位坐标;yaw为车身的航向角;(xt’,yt’)为标定物的参考坐标。
16、可选地,所述传感器被配置成输出三维点云数据,并且所述传感器模块被配置成对所述三维点云数据进行分割和聚类而获得所述标定物的点云簇,并计算所述标定物的点云簇的质量中心点以获得所述标定物的质心坐标。
17、可选地,所述标定物的位置测量信息由差分定位系统获得,并且所述至少两个标定物能够动态地设置在所述差分定位系统的基站信号所覆盖的场地中。
18、根据本发明的另一方面,提供了一种使用参数标定系统对传感器的参数进行标定的方法,所述传感器被安装在无人驾驶矿车上,其中所述方法包括:由所述测量参数模块接收至少两个标定物的位置测量信息,并换算成所述至少两个标定物在矿区地图坐标系下的测量坐标;由所述映射模块将所述标定物的测量坐标转换成车身坐标系下的坐标,以作为所述标定物的参考坐标;由所述传感器模块获得所述传感器所感测的所述至少两个标定物的点云簇,并基于所述点云簇计算所述至少两个标定物在传感器坐标系下的质心坐标;由所述标定模块基于所述至少两个标定物的参考坐标和质心坐标,计算航向角偏移量和坐标平移偏移量作为所述传感器的标定参数。
19、可选地,所述航向角偏移量的计算包括:由所述标定模块的偏角计算单元将所述至少两个标定物的质心坐标的连线与所述至少两个标定物的参考坐标的连线进行角度比对来获得所述航向角偏移量。
20、可选地,所述坐标平移偏移量的计算包括:由所述标定模块的偏心计算单元基于所述航向角偏移量,根据以下等式计算所述标定物的质心坐标的角度参数修正坐标:
21、xnew = xc×cos(yaw_fix)+ yc×sin(yaw_fix)
22、ynew = yc×cos(yaw_fix)- xc×sin(yaw_fix)
23、其中,(xc,yc)为标定物的质心坐标;(xnew,ynew)为标定物的角度参数修正坐标;yaw_fix为航向角偏移量,并且根据所述标定物的参考坐标和所述角度参数修正坐标获得所述坐标平移偏移量。
24、可选地,所述坐标平移偏移量的计算还包括:由所述偏心计算单元根据以下等式计算所述标定物的参考坐标与所述角度参数修正坐标之间的平移差值:
25、xf =(xt’ - xnew)
26、yf =(yt’ - ynew)
27、其中,(xt’,yt’)为标定物的参考坐标;(xnew,ynew)为标定物的角度参数修正坐标;(xf,yf)为标定物的参考坐标与角度参数修正坐标的平移差值;并且计算至少两个标定物的所述平移差值的平均值作为所述坐标平移偏移量。
28、可选地,由所述测量参数模块接收所述无人驾驶矿车的车身的位置测量信息,并基于所述车身的位置测量信息获得所述车身在所述矿区地图坐标系下的定位坐标和航向角;由所述映射模块根据以下等式将所述标定物的测量坐标转换成车身坐标系下的参考坐标:
29、xt’ =(xm - xt)×cos(yaw)+(ym - yt)×sin(yaw)
30、yt’ =(ym - yt)×cos(yaw)-(xm - xt)×sin(yaw)
31、其中,(xm,ym)为标定物的测量坐标;(xt,yt)为车身的定位坐标;yaw为车身的航向角;(xt’,yt’)为标定物的参考坐标。
32、可选地,所述传感器被配置成输出三维点云数据,并且由所述传感器模块对所述三维点云数据进行分割和聚类而获得所述标定物的点云簇,并计算所述标定物的点云簇的质量中心点以获得所述标定物的质心坐标。
33、可选地,所述标定物的位置测量信息由差分定位系统获得,并且所述至少两个标定物能够动态地设置在所述差分定位系统的基站信号所覆盖的场地中。
34、根据本发明的又一方面,提供了一种存储有计算机指令的计算机可读存储介质,其中所述计算机指令用于使计算机执行根据本发明的方法。
35、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!