电动力绳离轨装置展开性能定量验证和部件选型优化方法
本发明属于航天器离轨,特别涉及一种电动力绳离轨装置展开性能定量验证和部件选型优化方法。
背景技术:
1、近年来,随着低轨道巨型星座技术的发展,空间碎片数量迅速增加。如果碎片数量达到临界阈值,就会引发“凯斯勒效应”,导致空间环境迅速恶化。为了维护空间环境,需要采取措施清除空间碎片。
2、空间碎片的清除技术分为被动和主动两种。被动清除是指依靠空间环境的作用,例如大气阻力等,使碎片自然地离开原有轨道。主动清除是指通过人为手段干预碎片的运行轨道,使其在较短时间内离开目标区域。被动清除方法通常所需时间较长且作用轨道范围有限,清除速度无法与人类日益增长的发射需求相匹配,难以阻止碎片数量的不断增长,因此目前研究的主流方向为主动空间碎片清除技术。
3、采用电动力绳装置进行离轨是近年来兴起的一种新颖的,具有节能且轻便特点的主动离轨方式。其工作原理为在需降轨航天器上装载小型电动力绳装置,通过弹射使得装置中的系绳展开,通过在系绳的一端施加电压使系绳两端形成电势差,从而使系绳具有吸附空间电子并配合电子发射装置形成电流的能力。当通有电流的导电系绳在轨道上运动时,会切割地球磁感线,进而产生洛伦兹力。若此时洛伦兹力方向与系统运动方向相反,则可对系统实现降轨效果。
4、为验证电动力绳装置的原理及可行性,目前各国已累计开展了十余次在轨实验,但是其中约半数以失败告终,失败原因多是由于系绳的展开释放出现故障,包括美国的tss-1项目,日本的t-rex和kite项目等。而国内尚无电动力绳装置的在轨实验,相关的设计成果也较少。申请号为201811308255.9,题为“航天器离轨电动力绳系”的专利申请中,公布了一种充气的绳系系统结构,但并不涉及电动力绳离轨装置的设计方法;申请号为200910217467.0,题为“一种基于电动力绳系的卫星离轨装置及方法”的专利申请中,公布了一种基于电动力绳系的卫星离轨装置的基本组成部分及示意图,并给出了工作的流程图,但并没有指出每个部分具体细节与选型优化方法。因此,目前电动力绳装置展开过程的定量实验及装置部件的选型优化方法方面仍存在较多空白。
技术实现思路
1、由于电动力绳离轨装置的实际工作长度一般远大于实验测定范围,因此电动力绳离轨装置展部件选型方法,多采用定性实验和控制补偿的方法,无法获取精度和可信度较高的实验数据,因此无法通过实验数据驱动部件的选型优化,也难以在地面实验中实现较为可靠性性能验证。本发明的目的是提供一种电动力绳离轨装置展开性能定量验证和部件选型优化方法,通过定量实验获取较高精度的实验数据,根据实验数据进行电动力绳离轨装置部件的选型优化,并使缩比展开实验的结果等效表征动力绳离轨装置的真实展开性能,提高电动力绳离轨装置实验的效率、数据精度和可信度,降低电动力绳离轨装置实验的成本和选型优化难度。
2、本发明的目的是通过以下技术方案实现的:
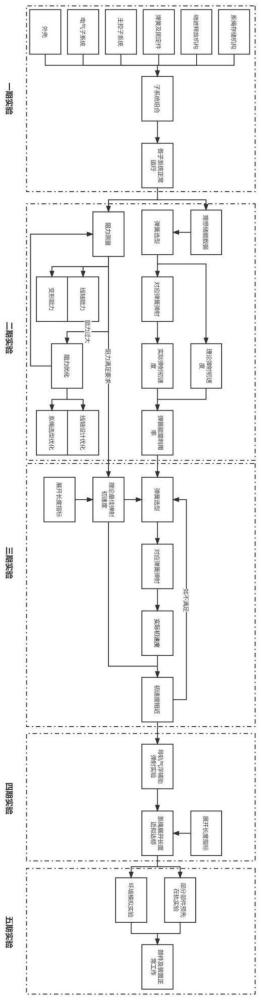
3、本发明公开的电动力绳离轨装置展开性能定量验证和部件选型优化方法,对应五期实验,包括如下步骤:
4、步骤一:进行第一期实验,验证系绳存储机构、锁紧释放机构、弹簧及固定件、主控子系统、电气子系统、外壳,直至所述系绳存储机构、锁紧释放机构、弹簧及固定件、主控子系统、电气子系统、外壳能够正常装配并运行。
5、步骤1.1:按初步电动力绳离轨装置设计结果将系绳存储机构、锁紧释放机构、弹簧及固定件、主控子系统、电气子系统、外壳装配组合在一起。电子发射器由于需要工作于真空环境,因此无法和其他部件在常规弹射实验中合并测试,将在第五期实验中和其他部件合并测试。
6、步骤1.2:任意选用一组储能能力较低的弹簧,按预定时序进行地面斜抛弹射实验。
7、步骤1.3:通过主控子系统中的通信模块将实验数据回传到终端,各部件如满足如下四个正常运行判据:供电正常、主控子系统控制锁紧释放机构解锁、系绳顺利弹射展开、系绳释放速度能够测量获得并传回终端,则验证各个子系统正常运行,完成第一期实验的目标。各部件指系绳存储机构、锁紧释放机构、弹簧及固定件、主控子系统、电气子系统、外壳。
8、通过斜抛的距离和角度信息计算系绳释放速度,系绳释放速度计算方式如下:
9、斜抛角度为θ,斜抛起始点高度为h,斜抛初速度为v0,斜抛落点距起始点的水平投影距离为l。设末端被弹射部分为质点,根据斜抛运动规律得:
10、
11、解出实际弹射时初速度大小为:
12、
13、步骤二:进行第二期实验,测量弹簧能量的利用率和系绳被拉出时所受到的阻力,并根据能量利用率和系绳被拉出时所受到的阻力进行弹簧精准选型和线轴参数优化。
14、第二期实验的实验对象包含系绳存储机构和弹簧,需针对系绳存储机构和弹簧进行迭代实验。为保证系绳在弹射时不发生断裂,需选用强度更高的系绳,而选用强度更高的系绳将使阻力增大,弹射初动能也同步增大,弹射初动能增大将提高对系绳强度的要求。因此盲目加粗系绳并不能解决系绳断裂的问题,通过迭代寻找阻力和强度均满足要求的系绳及与弹射初动能要求匹配的弹簧。
15、针对系绳存储机构进行迭代实验优化:
16、步骤2.1:拉伸阻力测量。为了减小拉伸阻力,从而减小弹射所需初动能,提高系统安全性,首先对拉伸阻力进行测量。如未达到预期阻力要求,进入步骤2.2对拉伸阻力进行优化,优化结束后返回步骤2.1,循环优化,直到满足预期阻力要求。
17、采用的拉伸阻力测量方法为机械臂拉伸系绳。具体步骤为:机械臂末端固定拉力传感器一端,拉力传感器另一端与系绳末端固连,机械臂匀速平行拉动系绳末端,拉力传感器将拉力数据传回终端,由于匀速平行拉动,拉力数值与阻力数值相等。
18、步骤2.2:针对拉伸阻力中的线轴阻力和系绳变形阻力分别进行优化。
19、步骤2.2.1:拉伸阻力优化。
20、拉伸阻力由线轴阻力和系绳变形阻力组成。线轴阻力主要由轴承自身转动时的阻力引起,此外轴承系统的同轴度及配合尺寸问题引起振动等问题也会使阻力增大。因此线轴阻力优化方式主要有两种,轴承选型和线轴部件设计优化。
21、(1)轴承选型
22、为减小轴承转动引起的摩擦,轴承选型选择轴承中阻力最小的氮化硅陶瓷轴承。轴径根据所设计线轴端部直径进行选择,轴承高度选择正常高度,避免高度过大使摩擦阻力增大,高度过小对线轴的支撑作用不足引起振动。
23、(2)线轴部件设计优化
24、线轴部件设计优化包括空间排布、配合尺寸选择、转轴直径和惯量选择。
25、空间排布方面,在高度方向,线轴直径应至少比电动力绳离轨装置预留空间的高度小20-30mm;在宽度方向,通过高度方向限制线轴直径后,宽度方向无其他限制;在长度方向,由于线轴两端为不对称结构,且编码器端厚度较大,因此为使线轴中部位于电动力绳离轨装置中心,以保证线轴出线平衡,存储系绳部分的长度至少应比电动力绳离轨装置预留空间的长度小60-70mm。
26、配合尺寸选择方面,为避免过松或过紧装配影响线轴的运动功能,并控制加工成本,装配公差定为it10-it12等级。
27、转轴直径和惯量的选择方面,减小线轴的转动惯量,以减小线轴转动时的阻力。因此在存储系绳长度不变的前提下,增大线轴的长度。在确定线轴长度后,根据所选择的系绳体积计算线轴的直径。
28、根据长度方面的约束,线轴存储系绳部分长度为lreel,整体的包络直径为d,参考简单立方堆积的空间利用率为η=52%,根据指标长度lexp,系绳占用的体积由下式估计:
29、
30、得vexp。存储系绳部分直径为dreel,根据:
31、
32、计算得dreel。
33、步骤2.2.2:系绳变形阻力优化。
34、系绳变形阻力主要由系绳吸收能量改变自身状态引起。该阻力的数值主要取决于系绳自身的特性,系绳自身的特性包括系绳材料的刚度强度特性、系绳的直径、系绳的构型。因此优化系绳变形阻力的方式为系绳材料的选型、系绳的直径和系绳构型设计,其中系绳材料选择的目的是选出导电性与强度特性均较好的材料,而系绳的直径和构型优化的目的是在不发生断裂的情况下选出总阻力尽可能小的构型。
35、(1)系绳材料选择。
36、系绳材料包括电导率、极限应力和应变数据以表征其导电性与强度,其中电导率能准确刻画材料的导电性,但极限应力和应变不能准确刻画材料拉伸断裂时的特性,因此引入虚拟量进行表征材料拉伸断裂时的特性。
37、根据材料力学,金属的应力-应变曲线被分为弹性变形区域、塑性变形区域、断裂区域,应力-应变曲线与横轴围成的面积为应变能密度,应变能密度与应变能的乘积为应变能,弹性和塑性变形区域的应变能为单位体积金属断裂前所能吸收的能量,即其中,σmax为断裂点所对应的拉伸应力。
38、由于难以获知准确应力-应变曲线,无法根据定义式计算应变能,因此定义虚拟应变能其中εmax为断裂点对应的应变。金属塑性变形的模量远小于弹性模量,因此虚拟应变能一定小于应变能,所以使用虚拟应变能判断强度,其安全裕度要大于应变能,且计算简便。
39、在系绳体积相同时,虚拟应变能的大小由项决定,将该项定义为虚拟应变能密度,记号为越大,则材料越不易发生断裂,从强度角度出发,选择最大的材料。但综合考虑材料导电性能并结合在轨实验资料,选材范围确定为铝及其常见合金中电阻率小于4×10-8ωm的材料。
40、(2)系绳主体直径的优化。
41、系绳的阻力和抗拉强度需求呈正相关关系,为避免断裂,应选择阻力与抗拉强度比值较小的系绳。系绳的抗拉强度与截面积成线性关系,但阻力与截面积的关系未知,因此将阻力与截面积比值定义为阻力系数,通过选择阻力系数较小的系绳完成系绳主体直径的优化。
42、(3)系绳强度及前端构型优化。
43、根据材料力学,系绳拉出任意长度卡顿时已拉出系绳所能储存的极限应变能大于末端动能,则使系绳在整个弹射过程中不发生断裂。系绳所能储存的极限应变能近似为步骤2.2.2中虚拟应变能,末端动能近似为步骤2.2.2中阻力数据与长度指标的乘积。
44、系绳共分为三段,第一段长度为l1,直径为d1,对应阻力为f1,为悬空状态下的加粗段,第一段长度为l2,直径为d2,对应阻力为f2,为缠绕状态下的加粗段,第三段长度为l3,对应阻力为f3,为系绳的主体。其中待优化变量为三段系绳的长度及前两段系绳的直径,优化约束如下:
45、系绳目标长度为lmax,满足l1+l2+l3=lmax。
46、释放第一段系绳之后,不发生断裂,即满足
47、释放第二段系绳之后,不发生断裂,即满足
48、求解方法采用内点法;优化的目标函数为总耗能e=f1l1+f2l2+f3l3最小或第一段系绳长l1最小,分别针对两目标进行求解,并选择合适的解。
49、针对弹簧优化:
50、步骤2.3:储能指标计算。参考相关资料中的阻力和能量利用率数据估算理想储能指标,作为弹簧选型依据。
51、步骤2.4:弹簧选型。根据所选弹簧的原长和所设计外壳的高度,计算得弹簧的压缩量。设弹簧压缩部分均处于线弹性范围内,根据弹簧的压缩量和弹簧劲度系数,通过胡克定律计算理论储能数据,选择理论储能数据和理论储能指标相近的弹簧完成选型。为提高能量利用率数据的可靠性,实验时使用选型范围附近多组不同型号的弹簧。
52、步骤2.5:理论弹射初速度计算。设弹簧储能完全转化为末端弹射初动能,根据能量守恒定理,结合末端质量,计算出末端弹射初速度。
53、末端被弹射部分质量为m,理论弹射初速度为v0t,根据能量守恒定律,有解得v0t。
54、步骤2.6:对应弹簧弹射。将步骤2.4选择的弹簧安装入电动力绳离轨装置,按预定时序进行地面斜抛弹射实验。
55、步骤2.7:实际弹射初速度计算。步骤2.7与步骤1.3内容一致,不再赘述。
56、步骤2.8:计算弹簧能量利用率。弹簧能量利用率为实际弹射初速度和理论弹射初速度比值的平方。
57、步骤2.2所得线轴阻力达到预定指标,且步骤2.8所得弹簧能量利用率测量结束,第二期实验目标完成。
58、步骤三:进行第三期实验,通过地面弹射实验,定量实现在轨弹射所需的初速度。
59、步骤3.1:最优弹射初速度计算。在电动力绳离轨装置质量、拉伸阻力、电动力绳离轨装置初始运动状态均确定的前提下,系绳的展开过程被弹射初速度唯一确定。通过改变弹射初速度,实现系绳恰好展开到指定长度且速度为零,此时的弹射初速度被定义为最优弹射初速度。最优弹射初速度由以下算法计算:
60、系绳展开过程中的简化动力学模型如下:
61、
62、
63、
64、其中θ为面内角;φ为面外角;l为系绳展开长度;约简质量其中m1为主星质量,m2为子星质量;qθ为面内角方向的受力总和,qφ为面外角方向的受力总和,ql为沿绳方向张力的受力总和;ω0为系绳相对于系统质心的初始姿态角速度。
65、根据系绳展开过程中的简化动力学模型,切换不同弹射初速度,给出不同弹射初速度下系绳展开过程中展开长度、速度、面内角、面外角随时间变化的关系。根据精度和余量要求,定义当系绳展开恰好超过指标长度时,末端展开速度为0时所对应的弹射初速度为最优弹射初速度,其精度截止到小数点后第一位。
66、步骤3.2:弹簧选型。根据末端质量和步骤3.1中给出的最优弹射初速度计算出末端弹射初动能。弹射初动能与步骤2.8测得的弹簧能量利用率数据相除得到弹簧储能数据。根据弹簧储能数据与系绳长度指标,进行精准的弹簧选型。步骤3.2和步骤2.4中弹簧选型方法一致,但数据来源不同。
67、步骤3.3:对应弹簧弹射。将步骤3.2选择的弹簧安装入电动力绳离轨装置,按预定时序进行地面斜抛弹射实验。
68、步骤3.4:实际弹射初速度计算。步骤3.4实际弹射初速度计算与步骤1.3实际弹射初速度计算内容一致,不再赘述。
69、步骤3.5:初速度校核。设置成功阈值指标ε0,如实际弹射初速度和理论最优弹射初速度之差小于ε0,则第三期实验成功,否则返回第二步。
70、由于在斜抛过程中被弹射部分的下边沿会先于质心触地,因此测量得到的触地时的投影距离l一定小于真实投影距离,所以解算出的v0同样会小于实际弹射初速度。因此,第三期实验成功的判据为:弹射初动能的计算值与最优弹射储动能差值小于预设判据,即将第四步中的速度数据带入,计算得ε,满足成功阈值指标,则第三期实验目标完成。在地面弹射实验中所设计电动力绳离轨装置,具备实现在轨弹射所需弹射初速度的能力。
71、步骤四:进行第四期实验,进行天地一致性实验,在地面实现系绳展开长度指标或弹射初期的定量模拟,以实现对电动力绳离轨装置展开性能的定量验证。
72、在地面弹射获得所需的弹射初速度后,需要完成天地一致性实验,即通过地面弹射得到与空间弹射相近的结果。当系绳展开长度指标小于实验设备特征长度时,步骤四的目标为在地面弹射中展开超过长度指标的系绳;当系绳展开长度指标大于实验设备特征长度时,步骤四的目标为使部分弹射实验的展开速度指标符合仿真理论结果。弹射实验中天地一致性的关键在于阻力问题,为了减小阻力,实验方法采用高塔下抛,实验设备特征长度指高塔高度。完成天地一致性实验证明电动力绳离轨装置具备在空间中完成实验目标的能力。
73、步骤五:进行第五期实验,进行空间环境测试,确保电动力绳离轨装置及部件具有在空间环境下正常工作的能力。
74、第五期实验的目标在于验证电动力绳离轨装置及内部各个部件均具备在空间环境下正常工作的能力。电动力绳离轨装置及其内部的部件,均需要在地面进行航天级的环境测试,以保证电动力绳离轨装置可在空间环境下正常工作。地面环境测试包括对电子发射装置在真空下的放电测试。
75、五期实验目的全部实现之后,电动力绳离轨装置已具备在轨展开指标长度系绳的性能,满足在轨展开定量实验要求的电动力绳离轨装置被确定为正样,将电动力绳离轨装置正样部件作为满足在轨实验要求的电动力绳离轨装置部件选型优化结果,即实现动力绳离轨装置展开性能定量验证和部件选型优化。如有部分指标没有完成,则需要针对性的调整各个子系统,并重复实验直到指标完成。
76、有益效果:
77、(1)本发明公开的电动力绳离轨装置展开性能定量验证和部件选型优化方法,包括五期实验。第一期实验的目的是验证系绳存储机构、锁紧释放机构、弹簧及固定件、主控子系统、电气子系统、外壳能够正常装配并运行;第二期实验的目的在于测量弹簧能量的利用率和系绳被拉出时所受到的阻力,并根据能量利用率和系绳被拉出时所受到的阻力进行弹簧精准选型和线轴参数优化;第三期实验的目的是通过地面弹射实验,定量实现在轨弹射所需的初速度;第四期实验的目的是在地面实现系绳展开长度指标或弹射初期的定量模拟,从而实现对电动力绳离轨装置展开性能的定量验证;第五期实验的目的是确保电动力绳离轨装置及部件具有在空间环境下正常工作的能力。五期实验循序渐进,有效提高了电动力绳离轨装置的优化效率。每期实验目的均实现后,电动力绳离轨装置部件选型优化完成;电动力绳离轨装置具备在轨实验能力,被确定为正样。
78、(2)本发明公开的电动力绳离轨装置展开性能定量验证和部件选型优化方法,采用斜抛速度测量实验——高塔下抛阻力补偿速度测量实验两步分离的实验方法进行电动力绳展开性能的定量验证,相比传统气浮法,实验过程中系绳不会因自身重力而弯曲,更符合空间实际工作情况。斜抛速度测量实验成本较低,大量斜抛速度测量实验与少量高塔下抛阻力补偿速度测量实验相结合,能在保持天地一致性前提下实现电动力绳离轨装置展开性能定量验证,并降低实验成本。
79、(3)本发明公开的电动力绳离轨装置展开性能定量验证和部件选型优化方法,基于拉伸阻力测量数据对拉伸阻力进行优化。通过机械臂匀速单向拉伸,传感器读取拉力数据方式获取系绳的拉伸阻力,测量精度较高,避免滑轮卷扬机阻力测量方案在测量过程中引入未知系统阻力;根据阻力测量结果,通过轴承选型和线轴部件设计对拉伸阻力中的线轴阻力分别进行优化,通过系绳材料的选型、系绳的直径和系绳构型设计对拉伸阻力中的系绳变形阻力分别进行优化,能够优化拉伸阻力,使拉伸阻力低于目标阻力。
80、(4)本发明公开的电动力绳离轨装置展开性能定量验证和部件选型优化方法,针对电动力绳离轨装置储能弹簧提出一种初步选型与精细化选型相结合的选型方法,基于先验劲度系数数据和电动力绳离轨装置尺寸数据,在线弹性条件下进行弹簧初步选型;在初选结果附近选择多组弹簧,通过斜抛实验测定其弹射状态的能量利用率,结合初步选型结果和能量利用率数据进行精细化的弹簧选型。初步选型快速缩小弹簧选型范围,提高选型效率,降低实验成本;精细化选型则采用理论计算与实物实验相结合的方式,确保选型弹簧可为末端提供弹射初动能;初步选型与精细化选型相结合的选型方法可以快速、低成本地进行弹簧的精准选型,有效提高实验效率并降低实验成本。
- 还没有人留言评论。精彩留言会获得点赞!