测距方法及系统与流程
本发明涉及测距,具体地,涉及测距方法及系统。
背景技术:
1、直接飞行时间(direct time of flight,dtof)技术是一种基于飞行时间测量原理的距离传感技术,与其他飞行时间测量技术相比,具有测距范围广、精度高、成本低、抗干扰性好等优点,被广泛应用于人机交互、智能家居、无人驾驶、机器人等领域。
2、dtof所用的部件至少包括激光器、探测器和时间数字转换器(time digitalconverter,tdc),其中,探测器通常采用单光子雪崩二极管(single-photon-avalanche-diode,spad)阵列。其中,激光器发出短脉冲激光,照射到被测物体,部分激光反射后被探测器接收。时间数字转换器记录发射和接收光脉冲的时间,计算出光在空中往返的飞行时间t,并进而得出物体的距离s=c*t/2,c为光速。
3、dtof通过多次测量光脉冲的飞行时间得到测距数据,并将测距数据进行统计绘制成直方图,通过从直方图中寻找峰值,将峰值所在的横坐标确定为反映被测目标物体距离的光子飞行时间,从而求取被测目标物体的距离。其中,测距数据所需的存储空间与直方图中的直条(bin)的数量和宽度(bin width)有关,而tdc的测量精度决定了直方图中的直条的数量和宽度。tdc的测量精度越高,直方图中每个直条所代表的时间/距离宽度越小,相同量程下的直条数量越多,相应的所需存储条目越多。
4、现有的dtof在量程范围大和测量精度高的情况下,需要大量的存储资源,从而导致占用芯片大部分的面积。
技术实现思路
1、鉴于上述问题,本发明的目的在于提供一种测距方法及系统,能够解决现有dtof技术中在量程范围大和测量精度高情况下需要大量存储资源,从而导致占用芯片大部分的面积的问题。
2、根据本发明的一方面,提供一种测距方法,包括:
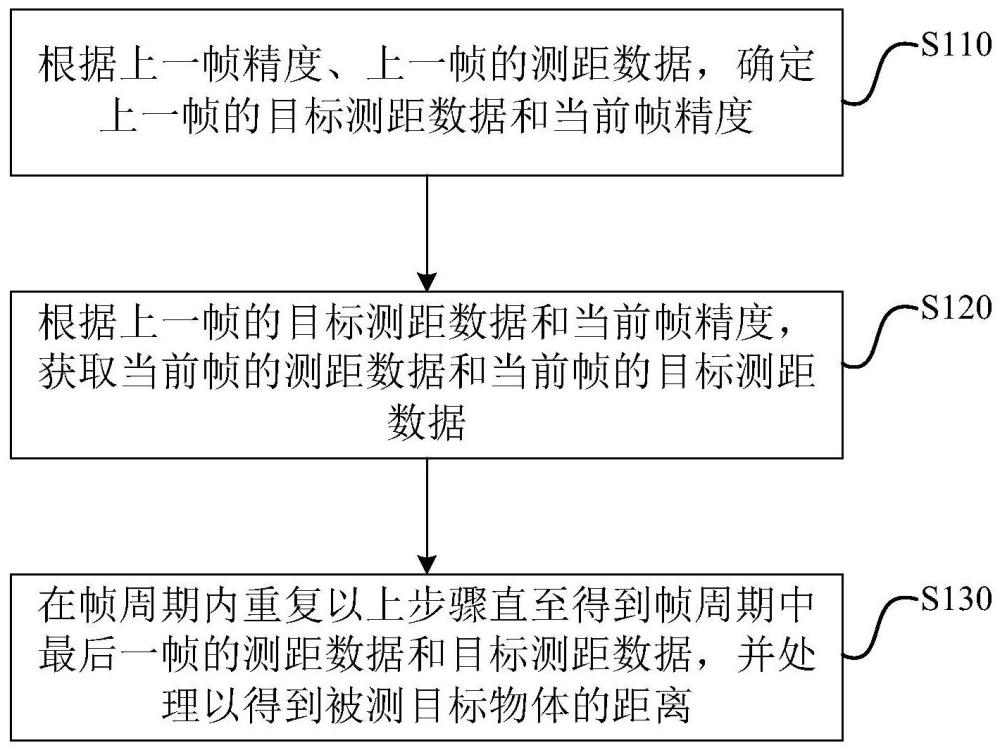
3、根据上一帧精度、上一帧的测距数据,确定上一帧的目标测距数据和当前帧精度;
4、根据上一帧的目标测距数据和当前帧精度,获取当前帧的测距数据和当前帧的目标测距数据;
5、在帧周期内重复以上步骤直至得到帧周期中最后一帧的测距数据和目标测距数据,并处理以得到被测目标物体的距离。
6、在一些可选的方案中,所述测距方法还包括:
7、根据第一帧精度,获取第一帧时间内的测距数据,并确定第一帧的目标测距数据;
8、根据第一帧精度确定第二帧精度,所述第二帧精度高于所述第一帧精度;
9、根据所述第二帧精度和所述第一帧的目标测距数据,获取第二帧的测距数据并确定第二帧的目标测距数据。
10、在一些可选的方案中,根据上一帧精度以及测距数据,确定当前帧精度包括:
11、当上一帧的测距数据分布集中时,设置当前帧精度高于上一帧精度;
12、当上一帧的测距数据分布分散时,设置当前帧精度低于上一帧精度。
13、在一些可选的方案中,当当前帧精度高于上一帧精度时,上一帧的目标测距数据的分布宽度为当前帧的所有测距数据的分布宽度之和。
14、在一些可选的方案中,当当前帧精度低于上一帧精度时,当前帧的所有测距数据的分布宽度为上一帧中包含目标测距数据在内的部分测距数据的分布宽度。
15、在一些可选的方案中,所述测距方法还包括:
16、将上一帧的测距数据的分布宽度划分至少三个区,所述三个区包括中心区以及位于中心区两侧的负区和正区;
17、根据上一帧的目标测距数据在三个区中的分布位置判断被测目标物体的运动趋势。
18、在一些可选的方案中,所述负区包括第一负区和第二负区,所述正区包括第一正区和第二正区,所述第一正区和所述第一负区分别与中心区相邻。
19、在一些可选的方案中,当上一帧的目标测距数据位于负区时,判断被测目标物体正在靠近;当上一帧的目标测距数据位于正区时,判断被测目标物体正在远离;当上一帧的目标测距数据位于中心区时,判断被测目标物体静止或者运动且运动的速度小于预设速度。
20、在一些可选的方案中,所述测距方法还包括:
21、根据所述上一帧的目标测距数据的分布位置与中心区的位置关系对当前帧的目标测距数据进行平移;当上一帧的目标测距数据的分布位置处于所述负区或所述正区内时,将当前帧的目标测距数据的分布位置进行平移,平移方向为所述负区或正区与所述中心区的相对方向一致。
22、在一些可选的方案中,所述当前帧的目标测距数据的分布位置的平移程度与上一帧的目标测距数据的分布位置与中心区之间的间隔正相关。
23、在一些可选的方案中,所述帧周期包括多个子帧周期,每个子帧周期包括至少一个测量帧和一个校正帧,所述校正帧的精度低于所述校正帧前一帧的测量帧的精度。
24、在一些可选的方案中,所述测距数据包括光子飞行时间的统计数据,所述测距数据的分布集中或分散与统计数据的峰值高度、标准差、半高宽、置信度、光子飞行时间事件数中的至少一个相关。
25、在一些可选的方案中,所述测距方法还包括:
26、当当前帧的帧精度达到预设精度时,将当前帧作为帧周期的最后一帧。
27、根据本发明的另一方面,提供一种测距系统,包括激光器、探测器、时间数字转换器、处理器和存储器,其中,所述处理器用于执行上述所述的测距方法。
28、本发明实施例的测距方法及系统,根据上一帧精度以及测距数据确定上一帧的目标测距数据和当前帧精度,以及根据上一帧的目标测距数据和当前帧精度,获取当前帧的测距数据和当前帧的目标测距数据,在帧周期内重复以上步骤直至得到帧周期中最后一帧的测距数据和目标测距数据,并处理以得到被测目标物体的距离,本技术根据对上一帧的测距数据的分布情况对当前帧的精度以及测距数据的分布宽度进行适应性地调整,达到测距精度、测距速度的平衡,且减少测距数据浪费。本发明实施例采用多帧检测的方式测距,在上一帧的目标测距数据的基础上继续进行测距,采集的测距数据仅分布在上一帧的目标测距数据附近,从而减小当前帧的测距数据的采集范围,不仅可以节省存储空间,还可以提高测量精度和测量速度,提高对被测目标物体的测量效率。
29、进一步地,上一帧的测距数据分布集中时,设置当前帧精度高于上一帧精度,即当前帧的精度比上一帧的精度细,实现采用精度逐渐递增的方式进行探测,不仅节省大量的存储占用,还可以更快速地得到被测目标物体的精确位置。
30、进一步地,当上一帧的测距数据分布分散时,设置当前帧精度低于上一帧精度,即当前帧的精度比上一帧的精度粗(即粗计数),可以利用多次粗计数的方式来实现及时纠偏,从而可以在当前帧内及时将上一帧的目标测距数据以及目标测距数据附近的疑似目标测距数据进行重新采集,以获得分布更加集中的目标测距数据,减少数据采集失误,对于距离变化较快的被测目标物体,可以减少动态测距误差。也就是说,本发明实施例适用于运动目标的测距,当被测目标物体的运动速度较快时采用粗精度,速度较慢时采用细精度,达到测距精度、测距速度与存储空间的平衡。
31、进一步地,根据上一帧的目标测距数据在上一帧的测距数据的分布位置判断被测目标物体的运动趋势,并根据所述上一帧的目标测距数据的分布位置与中心区的位置关系对当前帧的目标测距数据的分布位置进行平移,可以减小被测目标物体快速移动导致的测量滞后,有助于提高测量速度、测量精度。
32、进一步地,通过对多帧探测设置周期性地粗计数校正,通过对多帧探测设置周期性地粗计数校正,可以防止测量过程中因某次测量不准确导致的后续测量跑偏问题,进一步提高测量精度。
- 还没有人留言评论。精彩留言会获得点赞!