管道内径测量装置及其测量方法与流程
本发明涉及管道检测,特别涉及一种管道内径测量装置及其测量方法。
背景技术:
1、现有的管道检测机器人在行走过程中,检测管道的内部情况,再将具体的情况通过视频等形式回传至电脑等设备上,以便工作人员及时知晓管道的内部情况。
2、但是,现有的管道检测机器人的检测管道内部情况时,无法对管道的内径进行测量,并且工作人员也无法通过视频直接判断管道内径。
技术实现思路
1、本发明的主要目的是提出一种管道内径测量装置及其测量方法,旨在通过第一转向组件和第二转向组件驱动测距机构于管道内进行多角度调节,以使测距机构能够更全面地检测管道的内部情况,进而以使测距机构能够准确、有效的测量管道的直径,从而保证测量数据的准确性。
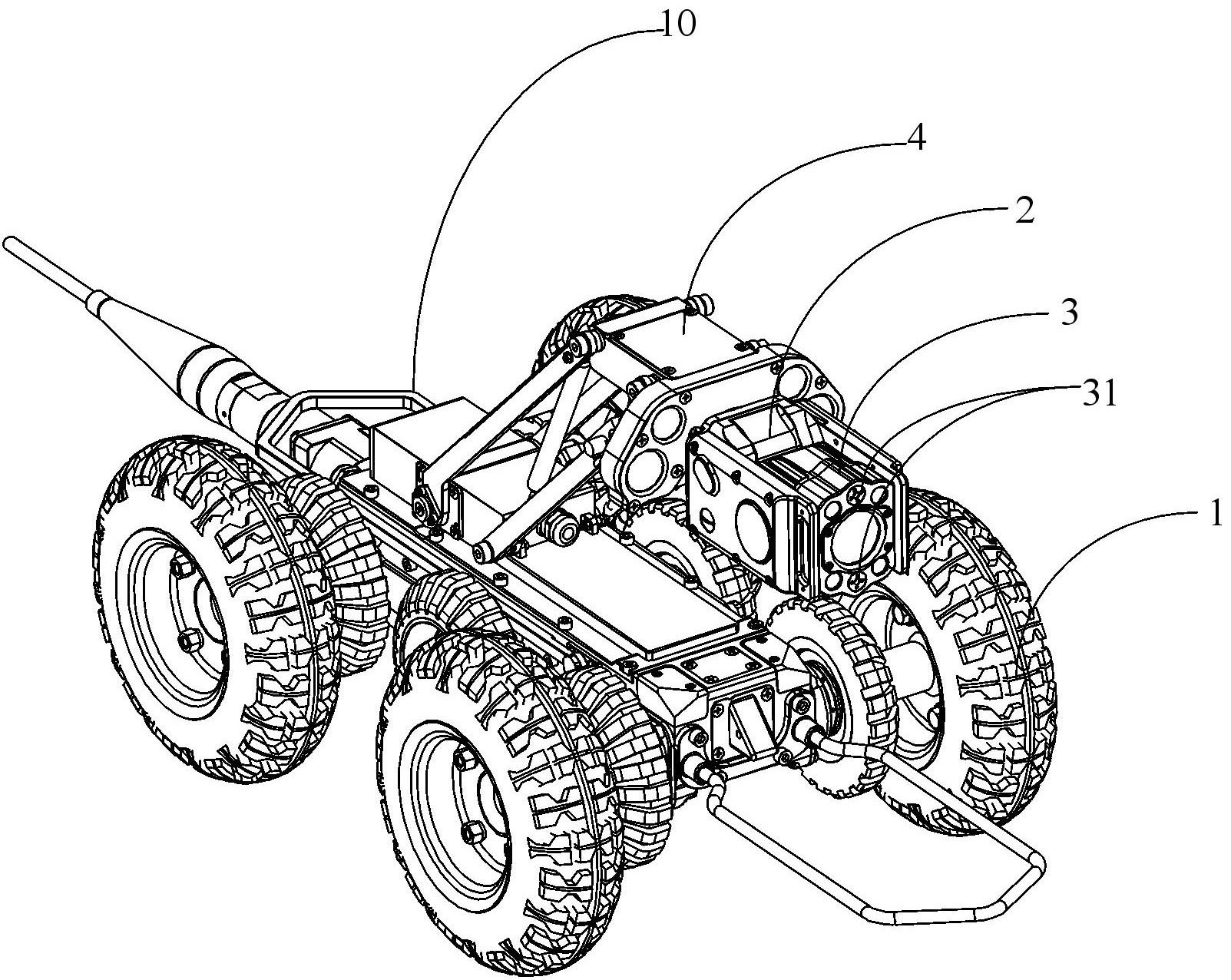
2、为实现上述目的,本发明提出的所述管道内径测量装置包括:
3、行走机构;
4、转向机构,所述转向机构包括第一转向组件和第二转向组件,所述第一转向组件的一端安装于所述行走机构,所述第二转向组件活动安装于所述第一转向组件的另一端,所述第一转向组件驱动第二转向组件于所述管道内周向转动;
5、测距机构,所述测距机构活动安装于所述第二转向组件的另一端,所述第二转向组件用于驱动所述测距机构相对于所述第一转向组件翻转,以使所述测距机构于所述管道内径向转动,所述测距机构包括至少两测距传感器,至少两所述测距传感器分别用于测量所述管道的内壁到所述测距传感器之间的距离;以及
6、主控装置,所述主控装置电连接于所述行走机构、所述第一转向组件、所述第二转向组件和所述测距机构,以控制所述第一转向组件、所述第二转向组件驱动所述测距机构转动。
7、可选的实施例,所述第一转向组件包括转轴件、旋转座和第一驱动件,所述转轴件的一端固定安装于所述行走机构,所述旋转座活动套设于所述转轴件的另一端,所述第二转向组件与所述第一驱动件间隔设于所述旋转座,所述第一驱动件驱动连接于所述转轴件,以使所述第一驱动件与所述旋转座带动所述第二转向组件于所述管道内周向转动。
8、可选的实施例,所述第一驱动件包括驱动电机和蜗杆传动组,所述蜗杆传动组安装于所述旋转座,所述驱动电机驱动连接于所述蜗杆传动组,所述转轴件的周侧固定连接有固定齿轮,所述蜗杆传动组啮合连接于所述固定齿轮,以带动所述旋转座相对于所述转轴件转动。
9、可选的实施例,所述第二转向组件包括壳体件,所述壳体件安装于所述旋转座的一侧;
10、所述壳体件于远离所述旋转座的一端设有两相对设置的夹持端,两所述夹持端之间形成有夹持空腔,所述测距机构的两侧转动连接于两所述夹持端。
11、可选的实施例,所述壳体件内形成具有开口的容纳腔,所述第二转向组件还包括第二驱动件和传动齿轮组,所述第二驱动件与所述传动齿轮组间隔安装于所述容纳腔内,所述第二驱动件驱动连接于所述传动齿轮组,所述传动齿轮组驱动连接于所述测距机构,以驱动所述测距机构相对于所述夹持空腔内转动。
12、可选的实施例,所述测距机构还包括探测主体和连接主体,所述连接主体的两端可转动连接于两所述夹持端,所述探测主体安装于所述连接主体的一侧,至少两所述测距传感器间隔设于所述探测主体远离所述连接主体的一侧。
13、可选的实施例,所述管道内径测量装置还包括升降机构,所述升降机构包括云台座和升降组件,所述升降组件的一端安装于所述行走机构,所述升降组件的另一端连接于所述云台座,所述转轴件安装于所述云台座。
14、可选的实施例,所述升降组件包括升降架和升降驱动件,所述升降驱动件安装于所述行走机构,所述升降架的一端铰接连接于所述云台座,所述升降架的另一端铰接连接于所述行走机构,所述升降驱动件驱动连接于所述云台座,所述升降驱动件用于驱动所述云台座上下移动。
15、本发明又提出一种管道内径测量方法,应用于如上任一项所述管道内径测量装置,其特征在于,所述管道内径测量方法包括以下步骤:
16、控制所述行走机构装载所述转向机构与所述测距机构进入所述管道内;
17、控制所述第二转向组件转动,以使两所述测距传感器朝向所述管道的内壁,此时的两所述测距传感器测出到所述管道的内壁的距离为pa,或者此时的两所述测距传感器测出到所述管道的内壁的距离为pd;
18、再控制所述第一转向组件分别转动两次,再分别重复步骤2,以得到pb和pc,或者得到pe和pf;
19、根据pa、pb和pc获取所述管道的内径,或者根据pd、pe和pf获取所述管道的内径。
20、可选的实施例,步骤2包括:定义所述第二转向组件第一次转动时,两所述测距传感器与所述管道的内壁之间距离分别为pa1、pa2,控制所述第二转向组件第二次转动,以使pa1等于pa2;
21、设此时所述管道的内壁到两所述测距传感器的距离设为pa,pa=pa1=pa2;
22、步骤3包括:控制所述第一转向组件分别转动两次,此时所述第一转向组件转动两次的角度分别是90度和180度,以分别得到pb和pc,其中,pb=pb1=pb2,pc=pc1=pc2;
23、步骤4包括:通过pa、pb和pc得到一个具有外接圆的三角形;
24、定义∠abp角度为b1,∠cbp角度为b2,∠abc即∠b=b1+b2,b1=cotabp=cotpb/pa,b2= cotpb/pc;
25、根据三角形外接圆的半径(r)公式 ac/sinb=2r,其中ac=pa+pc,以算出管道的直径2r。
26、可选的实施例,步骤2包括:定义所述第二转向组件第一次转动时,两所述测距传感器与所述管道的内壁之间距离分别为pd1、pd2,控制所述第二转向组件第二次转动,以使pd1等于pd2;
27、设此时所述管道的内壁到两所述测距传感器的距离设为pd,pd=pd1=pd2;
28、步骤3中包括:控制所述第一转向组件分别转动两次,此时所述第一转向组件转动两次的角度分别为α1和α2,以分别得到pe和pf,其中,pe=pe1=pe2,pf=pf1=pf2;
29、步骤4中包括:通过pd、pe和pf得到一个具有外接圆的三角形;
30、定义∠pde为β1,∠pfe为β2,∠def为β3;
31、根据余弦定理,ef²=pe²+pf²-2pe·pf·cosα2,de²=pd²+pe²-2pd·pe·cosα1,进而求出ef和de的边长;
32、再次根据余弦定理,cosβ1=pd²+de²-pe² / 2pd·de,cosβ2=pf²+ef²-pe²/ 2pf·ef,以求出β1和β2的具体角度;
33、进而根据β3=360°-α1-α2-β1-β2,以求得β3的具体角度;
34、根据余弦定理,df²=de²+ef²-2de·ef·cosβ3,以求出df的长度;
35、根据三角形外接圆的半径(r)公式 df/sinβ3=2r,以算出管道的直径2r。
36、本发明技术方案的所述管道内径测量装置包括行走机构、转向机构、测距机构和主控装置,包括行走机构、转向机构、测距机构和主控装置,转向机构包括第一转向组件和第二转向组件,第一转向组件的一端安装于行走机构,第二转向组件活动安装于第一转向组件的另一端,第一转向组件驱动第二转向组件于管道内周向转动;测距机构活动安装于第二转向组件的另一端,第二转向组件用于驱动测距机构相对于第一转向组件翻转,以使测距机构于管道内径向转动,进而通过第一转向组件和第二转向组件驱动测距机构于管道内进行多角度调节,以使测距机构能够更全面的检测管道的内部情况,进而以使测距机构能够准确、有效的测量管道的直径,从而保证测量数据的准确性,并且测距机构包括至少两测距传感器,至少两测距传感器分别用于测量管道的内壁到测距传感器之间的距离,进而通过至少两个测距传感器共同测量管道的内径,以使测量出来的内径数据更加准确;并且主控装置电连接于行走机构、第一转向组件、第二转向组件和测距机构,进而以控制第一转向组件、第二转向组件驱动测距机构转动。
- 还没有人留言评论。精彩留言会获得点赞!