一种降低强反光影响的弹壳底火痕迹采集装置与方法
本发明属于刑侦鉴别领域,具体的说是一种降低强反光影响的弹壳底火痕迹采集装置与方法。
背景技术:
1、常用的击针痕迹检验方法主要有人工识别和自动识别两大类。在人工识别方面,常用方法有体视显微镜、比较显微镜和电子显微成像等。人工方法存在操作效率低、观察困难、主观性强等缺点,同时可能对弹壳造成痕迹二次破坏的风险。在对弹壳底火进行三维扫描的过程中,需要将可见的蓝色半导体激光投向弹壳表面,当激光照射到弹壳底火的光滑弧边时,由于镜面反射的现象导致强反光的问题,从而造成测量数据失效或者精度降低的问题。
2、现有专利如申请号为202010207873.5,名称为《一种子弹底火三维痕迹特征采集装置与方法》的中国发明专利,其技术方案如下:本发明一种子弹壳底火三维痕迹特征采集装置及方法,其包括载物滑台、载物滑块、二维角度平台、弹壳夹具、位移传感器、多维度调整平台、控制电路和计算机,所述载物滑台、二维角度平台、位移传感器、多维度调整平台和计算机均与控制电路连接;所述位移传感器用于测量位移传感器与弹壳上被测痕迹之间距离。但是上述专利采用的方法采集弹壳痕迹会出现强反光现象,影响弹壳底火痕迹测量的精度与准确性;同时采用点激光位移传感器,采集效率较低。
技术实现思路
1、为了解决传统人工采集检验方法效率低、主观性强、易造成对弹壳痕迹二次破坏以及可能因为弹壳金属表面强反光对激光位移传感器的测量准确性产生影响的问题,本发明提供了一种降低强反光影响的弹壳底火痕迹采集装置与方法。
2、为实现上述技术效果,本技术的技术方案如下:
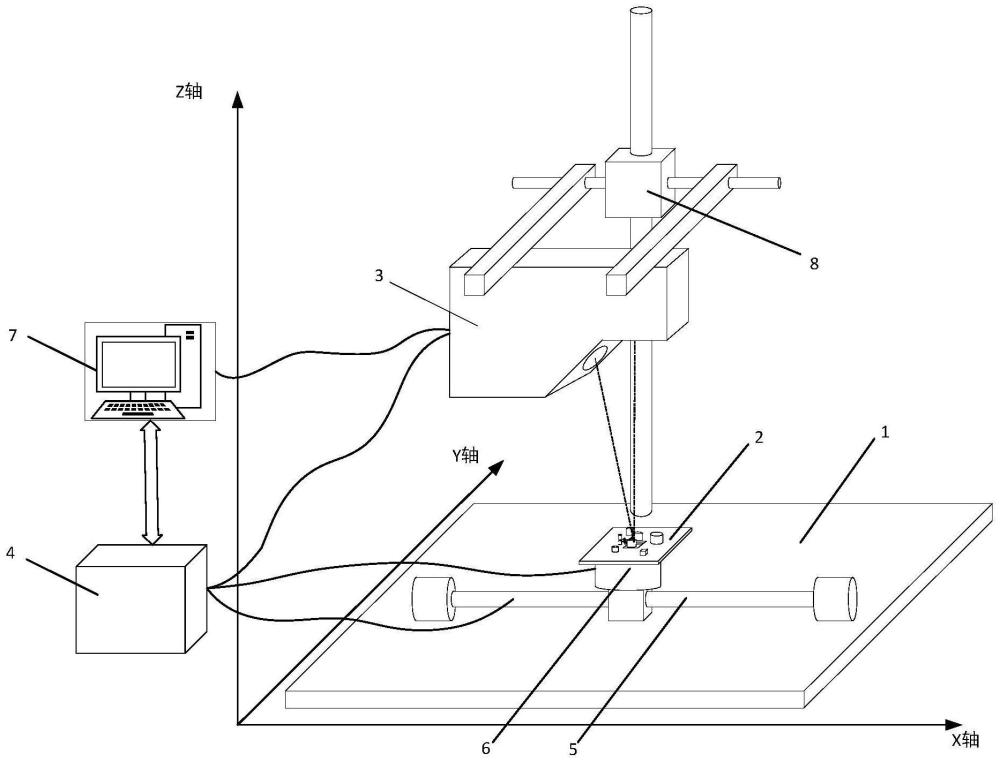
3、一种降低强反光影响的弹壳底火痕迹采集装置,其特征在于:包括固定支架(1)、载物台(2)、位移传感器(3)、控制电路(4)、电动滑台(5)、电动旋转平台(6)、计算机(7)和z轴调整夹具(8);所述位移传感器(3)通过螺钉固定在z轴调整夹具(8)上;所述位移传感器(3)、电动滑台(5)、电动旋转平台(6)和计算机(7)均与控制电路(4)电气相连;所述位移传感器(3)和计算机(7)电气相连;
4、所述固定支架(1)用于支撑固定电动滑台(5)和z轴调整夹具(8);
5、所述载物台(2)用于设置特殊标定点和放置被测量的射击弹壳;
6、所述位移传感器(3)为线性激光位移传感器,用于测量射击弹壳底火痕迹的凹陷深度;
7、所述控制电路(4)用于电动滑台(5)和电动旋转平台(6)的运动、控制位移传感器(3)进行痕迹测量并读取测量结果上传到计算机(7);
8、所述计算机(7)用于对接收到的数据进行分析处理,并绘制出三维痕迹图像;
9、所述z轴调整夹具(8)用于支撑位移传感器(3)并调整位移传感器(3)与载物台(2)之间的距离,可以使位移传感器(3)沿着固定支架(1)上的垂直支撑杆沿z轴移动;使用时,优选将位移传感器(3)的测量中心调至与载物台(2)上所夹持弹壳底平面高度一致。
10、进一步地,所述载物台(2)采用哑光塑料制作;所述载物台(2)设置有正方形底板(21),所述底板(21)的中间位置设置有弹壳夹具(22),所述底板(21)靠近位移传感器(3)一侧的表面设置标定柱a(23),标定柱b(24),标定柱c(25)和标定柱d(26);弹壳夹具(22)与底板(21)之间通过万向固定支架(27)连接。
11、进一步地,所述标定柱a(23),标定柱b(24),标定柱c(25)和标定柱d(26)的形状和/或尺寸不相同;优选地,标定柱a(23)是半径为r、高度为2h的圆柱体;标定柱b(24)是尺寸为r×r×1.5h的长方体,其中底面尺寸为r×r,高度为1.5h;标定柱c(25)是半径为r/2、高度为h的圆柱体;标定柱d(26)是尺寸为r/2×r/2×h/2的长方体,其中底面尺寸为r/2×r/2,高度为h/2;r是用于痕迹检验型号的弹壳底部最大半径,h是用于痕迹检验的枪支撞针在弹壳底火上撞击痕迹的最大深度。
12、进一步地,所述标定柱a(23),标定柱b(24),标定柱c(25)和标定柱d(26)中,任意两个标定柱的底面中心点在底板(21)上的x坐标和y坐标均不关于底板(21)的x轴和y轴中心线对称;设正方形底板(21)中心为坐标原点,往底板右侧方向为x轴正方向,往底板上侧方向为y轴正方向,与底板(21)表面垂直且靠近位移传感器(3)方向为z轴正方向;优选地,标定柱a(23),标定柱b(24),标定柱c(25)和标定柱d(26)的中心点坐标分别为(3r,r),(-2r,3r),(-3r/2,-2r)和(5r/2,-5r/2),其中r是用于痕迹检验型号的弹壳底部最大半径。
13、进一步地,位移传感器(3)是优可测atometrics的3d线激光测量仪ar-5030;电动旋转平台(6)是y200ra60高精度电控旋转工作台;控制电路(4)是以stm32f407为核心的电路控制板;计算机(7)与控制电路(4)通过rs232协议进行指令和数据传输;计算机(7)与位移传感器(3)通过千兆以太网通信,进行位移传感器(3)参数的配置及测量数据的传输。
14、一种降低强反光影响的弹壳底火痕迹采集方法包括如下步骤:
15、步骤一,将被测弹壳放入设置在载物台(2)上的弹壳夹具(22)中,调整弹壳在夹具中位置,使弹壳底平面与标定柱a(23)上表面在z轴方向上差异不大于±2mm;调整底板(21)与弹壳夹具(22)间的万向固定支架(27),使弹壳底平面与底板(21)表面平行;
16、步骤二,通过控制电路(4)控制电动旋转平台(6)旋转到0度位置;并控制电动滑台(5)沿x轴负方向移动,直到位移传感器(3)的扫描线位于正方形底板(21)的左侧边沿,将此时载物台(2)所在的x轴位置定义为扫描起始点;
17、步骤三,通过控制电路(4)控制位移传感器(3)沿x轴正方向以δ微米为步进值移动并逐行进行扫描;通过控制电路(4)对位移传感器(3)的测量数据进行读取后缓存在控制电路(4)的内存中,直到位移传感器(3)的扫描线位于正方形底板(21)的右侧边沿,将此时载物台(2)所在的x轴位置定义为扫描终止点;其中δ的取值与位移传感器(3)在y轴的测量分辨率相同;扫描完成后得到覆盖边长为l毫米正方形底板(21)范围的m×m二维数组d1,数组中元素的数值为每一个扫描点的凹痕深度数据,其中
18、步骤四,通过控制电路(4)控制电动旋转平台(6)沿顺时针方向旋转90度,控制电动滑台(5)沿x轴负方向移动到扫描起始点,并重复步骤三进行测量,将本步骤扫描测量到的数据标记为d2;
19、步骤五,重复2次步骤四的过程,将2次测量到的数据分别标记为d3和d4;至此完成了对射击弹壳底火痕迹四个角度的四组测量;
20、步骤六,控制电路(4)将缓存在内存中的数据d1、d2、d3和d4上传到计算机(7);
21、步骤七,在计算机内部对采集到的数据d1、d2、d3和d4进行配准,并对配准后的每个数组以正方形底板(21)中心点为中心,提取边长为2r毫米的正方形区域内数据,其中r是用于痕迹检验型号的弹壳底部最大半径;将提取得到维度为n×n的二维数组并分别标记为d1*、d2*、d3*和d4*,其中
22、具体地,对采集到的四组数据d1、d2、d3和d4进行配准的具体方法为:对d2、d3和d4中数据进行角度旋转,使其与d1中数据采集角度相同,旋转后的数据分别标记为d2’、d3’和d4’;其中通过对d2逆时针旋转90度得到d2’,对d3上下翻转得到d3’,通过对d4顺时针旋转90度得到d4’;
23、以d1中数据为基准,对d2’、d3’和d4’中数据分别进行平移对准;其中平移对准具体方法为:首先将d1、d2’、d3’和d4’中元素值在标定柱a(23),标定柱b(24),标定柱c(25)和标定柱d(26)中任意标定柱高度值的元素值设置为1,其余元素设置为0,得到更新后的矩阵,并将更新后的矩阵分别标记为和通过滑窗法在1-m范围内依次设置不同的行和列平移参数对进行平移,并计算与矩阵中对应元素平方差之和,选择平方差之和最小时对应的平移参数作为配准平移操作参数;采用得到的配准平移操作参数对d2’进行平移,将平移后得到的矩阵标记为采用同样的方法得到d3’和d4’平移配准后的矩阵和
24、分别对d1,和四个数组中,第行、第列之间的子数组进行提取,相应得到四个n×n的二维数组并标记为d1*、d2*、d3*和d4*。步骤八,在计算机内部对提取后的数据进行强反光错误校正,得到校正后维度为n×n的二维数组d5;具体地,对采集到的数据进行强反光错误校正的具体方法为:针对d1*、d2*、d3*和d4*四个二维数组中相同索引位置的元素计算数学期望和标准差;设索引位置为第x行、第y列的元素在d1*、d2*、d3*和d4*中对应数值分别为z1、z2、z3和z4,则期望计算方法为:
25、
26、标准差计算方法为:
27、
28、并将z1、z2、z3和z4与和3σxy进行对比,如果或者则判定zk为强反光的异常值;如果z1、z2、z3和z4中不存在异常点,则直接将作为校正后第x行、第y列位置元素的测量数据;如果存在异常点,则将异常点剔除后对剩下的非异常数据计算数学期望作为该索引位置最终的测量数据;将校正后得到维度为的n×n数组标记为d5。
29、步骤九,在计算机内部利用d5中的数据绘制三维痕迹重建形貌图。
30、具体地,绘制三维痕迹重建形貌图的具体方法为:针对维度为n×n的二维数组d5的每一点数据,首先映射其x轴和y轴坐标值;具体映射方法为:针对d5中第i行第j列的数据,将其x轴和y轴坐标分别映射为i*δ和j*δ,其中δ为扫描数据时电动滑台(5)的移动步进值;对d5中所有数据点完成坐标映射后,利用所有数据点映射后的坐标值创建二维网格,d5中元素值作为对应点的凹陷深度值,构建三维散点图;并对任意两个相邻点采用三次样条插值法进行数据插值,得到弹壳痕迹的三维形貌图。
31、本技术的优点在于:
32、1.解决传统人工采集检验方法效率低、主观性强、易造成对弹壳痕迹二次破坏的难题。
33、2.针对激光扫描对弹壳底火光滑曲面时会出现的强反光的现象,设置具有特殊标定点的弹壳载物台,通过对底火痕迹进行不同角度多次测量后,结合配准和校正算法对弹壳金属表面强反光造成的测量错误数据进行校正,并校正弹壳金属表面强反光导致的光学测量问题。
34、3.装置设备小巧,便携性强,成本低。
- 还没有人留言评论。精彩留言会获得点赞!