一种带转台的单基线干扰仪测向系统及方法与流程
本发明属于无线通信领域,特别涉及该领域中的一种带转台的单基线干扰仪测向系统及方法。
背景技术:
1、在现代无线通信系统中,干扰信号是一个常见的问题,对通信系统的性能和可靠性造成很大影响。干扰信号可以由多种因素引起,包括其他无线设备的信号、天气因素(如闪电、雷雨等)以及电磁噪声等。干扰信号会导致通信信号质量下降、传输速率减慢甚至通信中断等问题,影响用户的通信体验。
2、为了解决干扰问题,传统的干扰源测向方法通常采用多天线阵列技术。这种方法通过多个天线接收到的信号进行测向,可以准确地定位干扰源的位置。然而,该方法需要使用大量的天线并进行复杂的阵列设计,增加了系统的体积、成本和工程难度。尤其在移动通信基站等场景中,需要在天线塔上部署大量的天线,给工程带来很大困难并增加了成本。
技术实现思路
1、本发明所要解决的技术问题就是提供一种带转台的单基线干扰仪测向系统及方法,具有设计简单、成本低的特点。
2、本发明采用如下技术方案:
3、一种带转台的单基线干扰仪测向系统,其改进之处在于:包括一根基线天线,在基线天线的底部安装转台机构,通过转台机构带动基线天线转动,还包括与基线天线电连接的信号处理模块。
4、进一步的,转台机构是由电机或液压机构驱动的旋转平台。
5、进一步的,信号处理模块的硬件电路部分包括前置放大器、采样器和模数转换器。
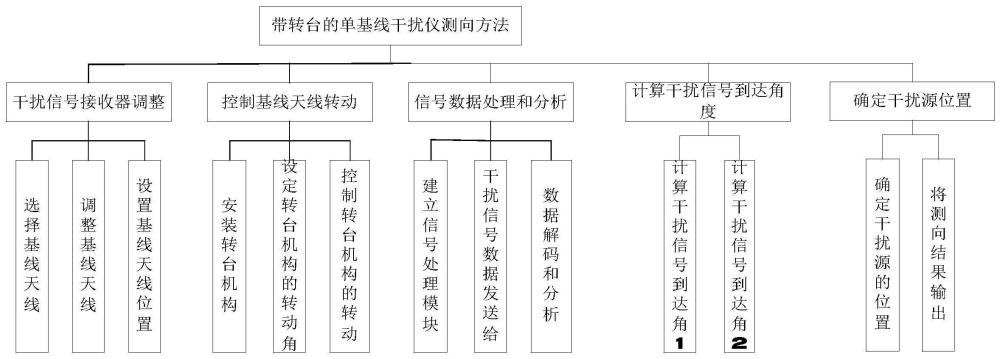
6、一种带转台的单基线干扰仪测向方法,适用于上述的系统,其改进之处在于,包括如下步骤:
7、步骤1,准备一根基线天线,作为干扰信号的接收器;
8、步骤2,在基线天线的底部安装转台机构,用于控制基线天线的转动角度;
9、步骤3,将接收到的干扰信号发送给信号处理模块,进行数据处理和分析;
10、步骤4,信号处理模块利用接收到的干扰信号数据,通过信号处理算法计算出干扰信号的到达角度;
11、步骤5,信号处理模块根据到达角度信息,确定干扰源的位置并输出。
12、进一步的,在步骤1中:根据具体的应用需求,调整基线天线的长度和天线间距;将基线天线设置在合适的位置,确保接收到干扰信号。
13、进一步的,在步骤2中:设定转台机构的转动角度,所述的转动角度为连续转动或离散角度转动;使用传感器对转台机构进行反馈控制,保证实际转动角度和设定角度的精确匹配,所述的传感器为位置传感器或编码器。
14、进一步的,在步骤3中:所述的处理包括解调、滤波和放大,所述的分析包括信号强度分析、频率分析、相位分析、谱分析和脉冲分析。
15、进一步的,在步骤4中:信号处理算法包括波束形成算法、最小方差无源定位算法和最大似然估计算法;
16、所述的波束形成算法为:设有n个接收天线,每个接收天线的输出为r[n],其中n表示时间,假设接收到的干扰信号为s(t-τ),其中τ表示时延,干扰信号的到达角度为θ,则每个接收天线的输出表示为:
17、r[n]=a(θ)*s(nt-τ)+w[n]
18、上式中,a(θ)表示信号的空间响应函数,w[n]表示接收到的噪声,假设接收到的噪声符合高斯分布,且均值为0,方差为σ^2;
19、波束形成算法的目标是最大化输出信号的信噪比:
20、maximize snr=|a(θ)*s(nt-τ)|^2/var[w[n]]
21、通过牛顿迭代法或lms算法,对权重系数进行迭代更新,最终得到权重系数值,从而计算出干扰信号的到达角度θ;
22、所述最小方差无源定位算法为:设有n个接收天线,每个接收天线的输出为r[n],其中n表示时间,假设接收到的干扰信号为s(t-τ),其中τ表示时延,干扰信号的到达角度为θ,构造接收信号的相关矩阵r,定义为:
23、r=e[r*r^h]
24、上式中,e表示数学期望操作,r表示接收信号向量,h表示共轭转置操作,利用最小方差理论,通过r矩阵的特征分解或最小二乘法,计算得到信号的到达角度θ;
25、所述最大似然估计算法为:设有n个接收天线,每个接收天线的输出为r[n],其中n表示时间,假设接收到的干扰信号为s(t-τ),其中τ表示时延,干扰信号的到达角度为θ,假设干扰信号符合高斯分布,且均值为s(t-τ),方差为σ^2,构建干扰信号的似然函数l,定义为:
26、l=p(r[n]|s(t-τ),θ)
27、利用已知的信号参数模型和似然函数,通过最大化似然函数来计算出干扰信号的到达角度θ。
28、进一步的,在步骤4中,通过对接收到的干扰信号数据进行时延分析、相位差分析和相关分析推导出干扰信号的到达角度;
29、所述的时延分析为:假设接收到的干扰信号为s(t-τ),其中τ表示时延,通过测量信号的到达时间差,计算得到干扰信号的到达角度;利用多个接收点或接收天线上的信号,根据时延差的大小和接收点之间的几何关系,计算出干扰信号的到达角度;
30、所述的相位差分析为:假设接收到的干扰信号为s(t-τ),其中τ表示时延,通过测量信号的相位差,计算得到干扰信号的到达角度,利用多个接收点或接收天线上的信号,根据相位差的大小和接收点之间的几何关系,计算出干扰信号的到达角度;
31、所述的相关分析为:利用信号的相关性质,通过计算接收信号之间的相关系数或互相关函数,得到干扰信号的到达角度,通过比较不同接收点之间的相关性,计算出干扰信号的到达角度。
32、进一步的,在步骤5中,假设有两个基线天线a和b,测向结果得到的到达角度分别为θa和θb;
33、根据三角定位原理,得到以下关系式:
34、tan(θa)=x/d1
35、tan(θb)=x/d2
36、上式中,x表示干扰源相对于基线天线的水平位置,d1和d2分别表示基线天线a和b之间的距离;
37、通过将以上两个方程联立,消去x,得到如下关系式:
38、tan(θa)/d1=tan(θb)/d2
39、进一步整理得到如下形式:
40、tan(θa)/tan(θb)=d1/d2
41、如果天线间的距离d1和d2已知,能通过测量到达角度的比值来计算干扰源相对于基线天线的位置;
42、具体的计算方法包括简单横向定位方法和多基线定位方法;
43、所述的简单横向定位方法为:假设天线a和b之间的距离已知,通过如下公式计算出干扰源相对于基线天线的水平位置:
44、x=(d1*tan(θa))/(tan(θa)-tan(θb))
45、所述的多基线定位方法为:
46、通过测量干扰信号相对于多个基线天线的到达角度,并结合天线之间的距离信息,使用三角定位原理计算出干扰源的准确位置。
47、本发明的有益效果是:
48、本发明所公开的系统,在相位干涉仪的基础上增加了转台机构和基线天线,结构简单。在相位干涉仪基础上只需两个阵元即可,无需复杂的阵元设计,用基线天线加转台机构的设计代替了解模糊步骤。
49、本发明所公开的系统,由于使用了单基线结构,所以整个系统的体积很小,可以适用于空间有限的环境,如室内和车载环境等。相对于多天线阵列,带转台的单基线干扰仪的制造和维护成本更低,适用于一些低成本应用,如大规模部署和低端无线通信系统等。通过控制转台机构,可以灵活调整基线天线阵列的方向,以适应不同方向和角度的干扰信号。通过信号处理算法计算干扰信号的到达角度,可以实现对干扰源的高精度定位,提供精确的测向结果。
50、本发明所公开的方法,有针对性的解决了相位干涉仪中基线设计复杂,基线比影响解模糊正确性的问题,具有易于理解,测角精度高,实用性强等优点。
- 还没有人留言评论。精彩留言会获得点赞!