一种水质监测的水下机器人
本发明涉及水质监测,具体涉及一种水质监测的水下机器人。
背景技术:
1、水质监测是监视和测定水体中污染物的种类、各类污染物的浓度及变化趋势,评价水质状况的过程,监测范围十分广泛,包括未被污染和已受污染的天然水及各种各样的工业排水等。水质监测可以为环境管理提供数据和资料,可以为评价江河和海洋水质状况提供依据,传统的水质监测通过直接对水体取样即可完成,而对于江河深处,人们无法有效的到达并监测水质,因此,常常需要利用水下机器人完成监测工作。
2、在专利号为cn210083511u的中国专利中,公开了一种可供水质监测的mini水下机器人,该装置通过控制采水舱打开或关闭,使得水流流入,以实现水样的采集,但是现有的装置在实际使用时,采样样品较为单一,对于水中的淤泥土壤及植物来说,通过对其进行采样并检测其内的物质含量同样是监测水质的重要依据之一,而淤泥等物体采集收储较为困难,从而大大影响了装置的使用效果。
3、因此,发明一种水质监测的水下机器人来解决上述问题很有必要。
技术实现思路
1、本发明的目的是提供一种水质监测的水下机器人,通过在机器人本体的底部设置取样腔,并在取样腔内设置多组活动板、固定铲和升降组件,可使活动板带动固定铲升降进出取样腔,且当固定铲伸出后可插入在水底淤泥土壤中,并在驱动组件、固定块和支撑杆的配合下,可使两个固定铲靠近并挖取泥土或植物,而后再通过活动板带动固定铲上升进入取样腔内,同时在固定铲取样进入后快速关闭取样腔,进而可实现水中的淤泥土壤及植物的快速采集收储,操作简单便捷,大大提高了装置的使用效果,以解决技术中的上述不足之处。
2、为了实现上述目的,本发明提供如下技术方案:一种水质监测的水下机器人,包括:
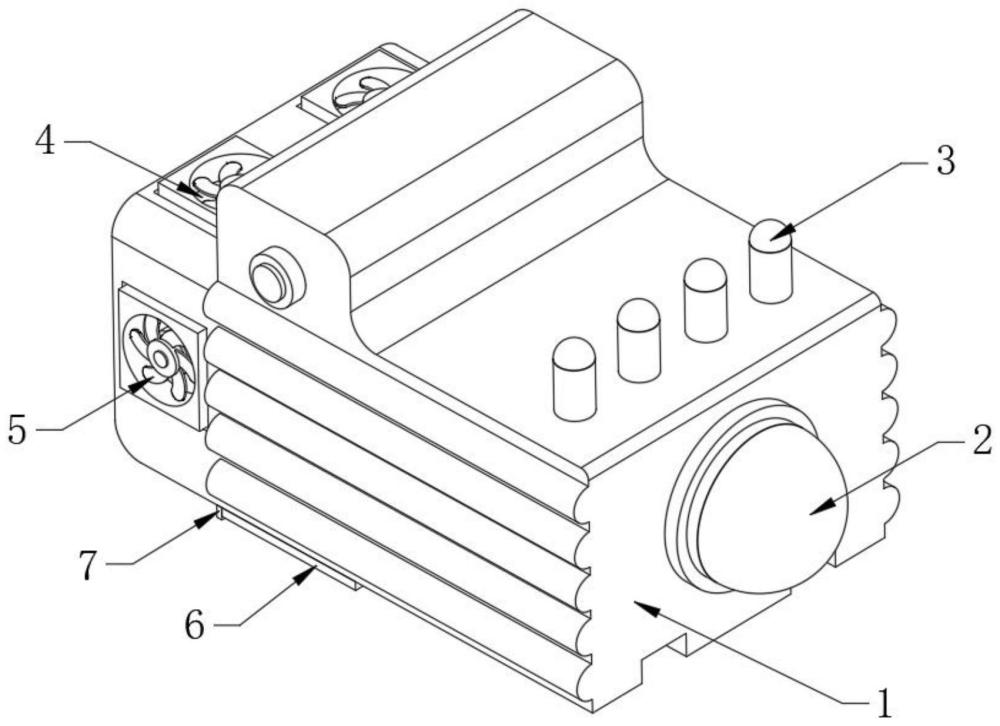
3、机器人本体,所述机器人本体的一端设有摄像头,且机器人本体的另一端设有多个推进组件,所述机器人本体的顶部设有水质检测探头;
4、取样腔,所述取样腔设于机器人本体的底部,且机器人本体的底侧靠近取样腔的下方设有可移动的封板,所述机器人本体上设有移动组件,且封板通过移动组件驱动移动;
5、收集机构,所述收集机构包括设于取样腔内的多个活动板以及升降组件,所述活动板通过升降组件驱动升降,且活动板的底部通过转轴对称设有两个固定铲,所述活动板的底部中间设有滑道,所述滑道的内部两端均设有固定块,所述固定块与固定铲之间转动连接有支撑杆,所述活动板上设有驱动组件,且两个固定块通过驱动组件相向或相背运动。
6、优选的,所述推进组件包括防水电机,且防水电机的输出端连接有螺旋桨叶片。
7、优选的,所述升降组件包括设于机器人本体内靠近取样腔上方的第一腔槽,所述第一腔槽的内设有多个第一电机,所述第一电机的输出端延伸至取样腔内、并设有朝向活动板的螺杆,所述螺杆的底端设有螺纹管,且螺纹管的底端与活动板固定连接。
8、优选的,所述驱动组件包括转动安装于滑道内的双向丝杆,所述活动板的内部一端嵌设有第二电机,且第二电机的输出端与双向丝杆连接。
9、优选的,所述活动板的两端对称设置有滑块,且取样腔的内侧设有与滑块相匹配的滑槽。
10、优选的,所述固定铲的侧壁设有多个通孔。
11、优选的,所述移动组件包括设置于机器人本体底侧的电动推杆,所述电动推杆的输出端连接有连接板,且连接板与封板固定连接。
12、优选的,所述电动推杆的外部设置有防水罩,所述机器人本体的底部相对于电动推杆的一端设有朝向封板的挡板。
13、优选的,所述机器人本体内设有第二腔槽,所述第二腔槽的内部安装有水泵,所述水泵的一端设有抽水管,且水泵的另一端设有排水管,所述抽水管的一端延伸至取样腔内,所述排水管的一端延伸至机器人本体外。
14、优选的,所述排水管的一端且位于第二腔槽内设有电磁阀。
15、在上述技术方案中,本发明提供的技术效果和优点:
16、通过在机器人本体的底部设置取样腔,并在取样腔内设置多组活动板、固定铲和升降组件,可使活动板带动固定铲升降进出取样腔,且当固定铲伸出后可插入在水底淤泥土壤中,并在驱动组件、固定块和支撑杆的配合下,可使两个固定铲靠近并挖取泥土或植物,而后再通过活动板带动固定铲上升进入取样腔内,即可实现快速取样;
17、同时在封板、连接板和电动推杆的配合下,可控制取样腔的开关,在固定铲取样进入后快速关闭,进而可实现水中的淤泥土壤及植物的快速采集收储,操作简单便捷,大大提高了装置的使用效果;
18、通过在机器人本体内设置第二腔槽、水泵、抽水管和排水管,可在采样结束取样腔关闭后,将取样腔内的水体快速抽出并排向机器人本体外部,进而可实现取样腔的排水,不进减小了机器人本体的载重,且防止了泥土或植物发生漂浮,大大提高了安全稳定性。
技术特征:
1.一种水质监测的水下机器人,其特征在于,包括:
2.根据权利要求1所述的一种水质监测的水下机器人,其特征在于:所述推进组件包括防水电机(4),且防水电机(4)的输出端连接有螺旋桨叶片(5)。
3.根据权利要求1所述的一种水质监测的水下机器人,其特征在于:所述升降组件包括设于机器人本体(1)内靠近取样腔(11)上方的第一腔槽(12),所述第一腔槽(12)的内设有多个第一电机(13),所述第一电机(13)的输出端延伸至取样腔(11)内、并设有朝向活动板(16)的螺杆(14),所述螺杆(14)的底端设有螺纹管(15),且螺纹管(15)的底端与活动板(16)固定连接。
4.根据权利要求1所述的一种水质监测的水下机器人,其特征在于:所述驱动组件包括转动安装于滑道(22)内的双向丝杆(23),所述活动板(16)的内部一端嵌设有第二电机(25),且第二电机(25)的输出端与双向丝杆(23)连接。
5.根据权利要求1所述的一种水质监测的水下机器人,其特征在于:所述活动板(16)的两端对称设置有滑块(19),且取样腔(11)的内侧设有与滑块(19)相匹配的滑槽(20)。
6.根据权利要求1所述的一种水质监测的水下机器人,其特征在于:所述固定铲(17)的侧壁设有多个通孔(18)。
7.根据权利要求1所述的一种水质监测的水下机器人,其特征在于:所述移动组件包括设置于机器人本体(1)底侧的电动推杆(26),所述电动推杆(26)的输出端连接有连接板(8),且连接板(8)与封板(6)固定连接。
8.根据权利要求7所述的一种水质监测的水下机器人,其特征在于:所述电动推杆(26)的外部设置有防水罩(9),所述机器人本体(1)的底部相对于电动推杆(26)的一端设有朝向封板(6)的挡板(7)。
9.根据权利要求1所述的一种水质监测的水下机器人,其特征在于:所述机器人本体(1)内设有第二腔槽(27),所述第二腔槽(27)的内部安装有水泵(28),所述水泵(28)的一端设有抽水管(29),且水泵(28)的另一端设有排水管(10),所述抽水管(29)的一端延伸至取样腔(11)内,所述排水管(10)的一端延伸至机器人本体(1)外。
10.根据权利要求9所述的一种水质监测的水下机器人,其特征在于:所述排水管(10)的一端且位于第二腔槽(27)内设有电磁阀(30)。
技术总结
本发明公开了一种水质监测的水下机器人,具体涉及水质监测技术领域,包括:机器人本体,所述机器人本体的一端设有摄像头,且机器人本体的另一端设有多个推进组件,所述机器人本体的顶部设有水质检测探头。本发明通过在机器人本体的底部设置取样腔,并在取样腔内设置多组活动板、固定铲和升降组件,可使活动板带动固定铲升降进出取样腔,且当固定铲伸出后可插入在水底淤泥土壤中,并在驱动组件、固定块和支撑杆的配合下,可使两个固定铲靠近并挖取泥土或植物,而后再通过活动板带动固定铲上升进入取样腔内,同时在固定铲取样进入后快速关闭取样腔,进而可实现水中的淤泥土壤及植物的快速采集收储,操作简单便捷,大大提高了装置的使用效果。
技术研发人员:曹艺,陈凤瑶,胡明亮,张子曦,王丰拉毛加,包珂欣,仇宇昊,赵紫舜
受保护的技术使用者:湖北职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!