一种交通路口感知设备的标定装置及标定方法与流程
本发明主要涉及到智能网联交通,特指一种交通路口感知设备的标定装置及标定方法。
背景技术:
1、随着科技的迅速发展,智能网联技术被越来越多地应用于各类交通场景之下。对于智能网联技术而言,往往要使用到各种的路侧系统,通过这些路侧系统来实现数据的采集、交互及应用。路侧系统一般需要前期就安装于交通场景下的预定位置处,安装数量较大,而且为了保证最终的控制效果,还需要保证路侧系统的安装质量。
2、上述路侧系统一般需要通过感知设备(摄像头和雷达)获取路面上交通参与者(人、车)的信息,但是感知设备里的坐标不是真实的gps坐标。为了将感知设备中获取到的交通参与者坐标转换成真实的gps坐标,一般需要通过标定生成一个旋转矩阵,将感知设备中的坐标转换为真实世界坐标。为此,在各类路测系统的安装过程中,均需要进行标定。
3、当前,常用标定方法的流程包括:
4、步骤1:通过人工的方式,手持rtk设备在路面上打点记录真实坐标;
5、步骤2:手动连接摄像头及雷达,记录打点位置在摄像头和雷达中的位置。
6、通过上述步骤1和2生成大量成对(真实坐标与感知设备坐标)的数据,运用算法将这些数据的转换矩阵计算出来。
7、也就是说,现有路侧系统的路口标定,需多人协作,一组负责手持rtk设备走到路中,打点记录真实gps坐标,一组负责在路边记录感知设备(摄像头及雷达)数据,两组人员记录完数据后,还需将gps坐标与感知数据进行计算,生成转换矩阵参数。
8、这种标定方式存在以下不足之处:
9、1、安装标定人员需要走到路中标定,存在安全隐患,且需要配备多人管理安全问题,整个标定的成本高。这是因为标定工作的感知设备安装在交通路口,必须要在路口进行标定。且高精地图的标定方式成本高,精度没有实地标定高。
10、2、数据的记录和处理过于繁琐,手动处理数据加大误差和人员成本。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种结构简单、使用方便、能够提高标定效率的交通路口感知设备的标定装置及标定方法。
2、为解决上述技术问题,本发明采用以下技术方案:
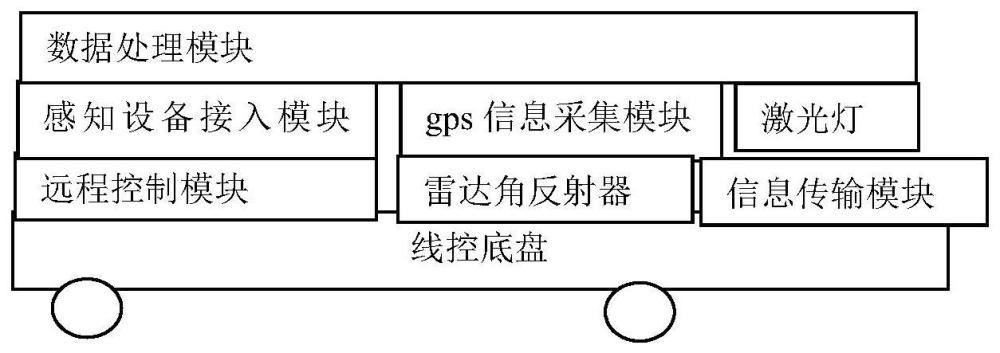
3、一种交通路口感知设备的标定装置,其包括行走机构及安装于行走机构上的雷达角反射器、激光灯、感知设备接入模块、gps信息采集模块、数据处理模块和信息传输模块;所述雷达角反射器用来增加被雷达探测到的概率和准确度;激光灯用于形成在摄像头成像范围内的标识点;所述感知设备接入模块用来连接交通路口感知设备,用来获取感知设备的位置数据;所述gps信息采集模块用来采集所在位置的gps坐标;所述数据处理模块用来将获得的多个点位信息通过算法计算出交通路口感知设备的坐标系与真实世界坐标系之间的转换矩阵;所述信息传输模块用于将处理完的数据传送到终端。
4、作为本发明装置的进一步改进:所述行走机构上还包括远程控制模块,通过所述远程控制模块来控制行走机构的移动。
5、作为本发明装置的进一步改进:所述行走机构为线控底盘。
6、作为本发明装置的进一步改进:所述行走机构为智能无人自行走底盘,用以按照规划好的轨迹进行行走和/或停留。
7、本发明进一步提供一种基于上述任意一项标定装置的标定方法,其流程包括:
8、步骤s1:标定装置在路面上行走及停留在指定地点,采集多个点位信息;
9、步骤s2:将获得的多个点位信息通过算法计算出感知设备坐标系与真实世界坐标系之间的转换矩阵;
10、步骤s3:将得到的转换矩阵以信息形式发送到指定接收终端。
11、作为本发明方法的进一步改进:所述步骤s1的流程包括:
12、步骤s101:将待标定装置停到指定地点;
13、步骤s102:标定装置通过gps信息采集模块记录当下的gps坐标;
14、步骤s103:通过感知设备接入模块与摄像头连接以获取当前图像帧,并用算法获取当前标定装置在摄像头中的像素点坐标;
15、步骤s104:通过感知设备接入模块与雷达连接以获取当前标定装置在雷达坐标系下的坐标;
16、步骤s105:重复上述步骤,标定装置在路面上行走并停留到指定地点,用以采集多个点位的信息。
17、作为本发明方法的进一步改进:通过远程遥控的方式控制标定装置在路面上行走和/或停留。
18、作为本发明方法的进一步改进:通过自行走规划的方式控制标定装置在路面上行走和/或停留。
19、作为本发明方法的进一步改进:所述步骤s2的流程包括:
20、步骤s201:假设装置的真实gps坐标系a为x(x,y),该点在摄像头坐标系b下的坐标为x'(x',y');h为两坐标之间的转换矩阵;设x'=h*x,将数据代入:
21、
22、步骤s202:因为是齐次坐标系,方程左右同时除h9,得到:
23、
24、步骤s203:将矩阵展开得到:
25、公式①
26、步骤s204:将下面的矩阵用已知的观测值代替:
27、
28、根据齐次坐标的齐次性质得到:
29、公式②:
30、结合公式①②得到:
31、公式③:
32、在公式③中,(x,y),(xr,yr)(x,y),(x^r,y^r)为观测到的已知参数,未知参数有h1'-h8'共8个,一对点能够产生两个方程,则求解公式③至少需要四组点对,求出h1'-h8';
33、步骤s205:求解过后,h1'-h8”为已知,得到:
34、
35、作为本发明方法的进一步改进:在每个路口采集超过20个点对,用最小二乘法来获取最优参数。
36、与现有技术相比,本发明的优点就在于:
37、本发明的交通路口感知设备的标定装置及标定方法,结构简单、使用方便、能够提高标定效率,通过远程控制或预设规划路径的方式完成自行走,避免了标定人员亲自上路口,能极大的避免交通安全事故,大大节省了人工成本。而且,本发明的自动化程度高,所有数据都是采集后由算法处理,能够答复降低人为误差,进而避免人为参与和干预,大大提高了标定精度。
技术特征:
1.一种交通路口感知设备的标定装置,其特征在于,包括行走机构及安装于行走机构上的雷达角反射器、激光灯、感知设备接入模块、gps信息采集模块、数据处理模块和信息传输模块;所述雷达角反射器用来增加被雷达探测到的概率和准确度;激光灯用于形成在摄像头成像范围内的标识点;所述感知设备接入模块用来连接交通路口感知设备,用来获取感知设备的位置数据;所述gps信息采集模块用来采集所在位置的gps坐标;所述数据处理模块用来将获得的多个点位信息通过算法计算出交通路口感知设备的坐标系与真实世界坐标系之间的转换矩阵;所述信息传输模块用于将处理完的数据传送到终端。
2.根据权利要求1所述的交通路口感知设备的标定装置,其特征在于,所述行走机构上还包括远程控制模块,通过所述远程控制模块来控制行走机构的移动。
3.根据权利要求2所述的交通路口感知设备的标定装置,其特征在于,所述行走机构为线控底盘。
4.根据权利要求1所述的交通路口感知设备的标定装置,其特征在于,所述行走机构为智能无人自行走底盘,用以按照规划好的轨迹进行行走和/或停留。
5.一种基于上述权利要求1-4中任意一项标定装置的标定方法,其特征在于,其流程包括:
6.根据权利要求5所述的标定方法,其特征在于,所述步骤s1的流程包括:
7.根据权利要求6所述的标定方法,其特征在于,通过远程遥控的方式控制标定装置在路面上行走和/或停留。
8.根据权利要求6所述的标定方法,其特征在于,通过自行走规划的方式控制标定装置在路面上行走和/或停留。
9.根据权利要求5-8中任意一项所述的标定方法,其特征在于,所述步骤s2的流程包括:
10.根据权利要求9所述的标定方法,其特征在于,在每个路口采集超过20个点对,用最小二乘法来获取最优参数。
技术总结
一种交通路口感知设备的标定装置及标定方法,该装置包括行走机构及安装于行走机构上的雷达角反射器、激光灯、感知设备接入模块、GPS信息采集模块、数据处理模块和信息传输模块;雷达角反射器用来增加被雷达探测到的概率和准确度;激光灯用于形成在摄像头成像范围内的标识点;感知设备接入模块用来连接交通路口感知设备,用来获取感知设备的位置数据;GPS信息采集模块用来采集所在位置的GPS坐标;数据处理模块用来将获得的多个点位信息通过算法计算出交通路口感知设备的坐标系与真实世界坐标系之间的转换矩阵;信息传输模块用于将处理完的数据传送到终端。该方法基于上述装置来实施。本发明具有结构简单、使用方便、能够提高标定效率等优点。
技术研发人员:孟潮,刘凯,龙腾蛟,肖海波,雷朝凯,张福升,赵帅,陈本庆,石亦磊,董俊逸
受保护的技术使用者:湖南湘江智车出行科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!