信号级星网全时全域探测性能预估方法与流程
本发明属于体系级复杂试验验证与评估,涉及信号级星网全时全域探测性能预估方法。
背景技术:
1、卫星星座进行目标探测跟踪时,不受气候和地理位置限制,具有全时全域探测跟踪优势。卫星和目标的相对运动速度较高,传统高轨卫星数量少、成本高,而且单颗卫星重访周期长、可观测空间有限、探测距离远造成目标分辨率也很低,一般仅具备预警与监测功能。
2、相比而言,低轨星网具有数量规模大、弹性扩展、成本低等优点,可以由几十颗扩展到上万颗,通过大规模星网组网探测,避免了单颗或者少量卫星组网探测所面临的可观测时间和空间受限、视场角小等缺点。为了实现体系级复杂对抗仿真试验验证评估,构建相应的信号级星网探测模拟系统,面临如何实现该系统在大规模多星联动条件下的全时全域探测性能预估的难题。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出信号级星网全时全域探测性能预估方法,实现了信号级星网探测模拟系统进行大规模多星联动条件下的全时全域探测性能预估。
2、本发明解决技术的方案是:
3、信号级星网全时全域探测性能预估方法,包括:
4、面向全域覆盖观测任务需求,确定星座轨道参数;星座轨道参数包括整个星座卫星的总数t、星座轨道面的个数p、轨道面内卫星的个数t、轨道倾角δ;
5、进行星座轨道动力学计算;
6、根据星上光学探测传感器配置,对目标进行红外或可见光成像过程模拟;
7、结合动力学计算、当前卫星的探测优先级和目标的机动轨迹预报数据,对相关卫星轨道及目标进行几何约束条件分析,即单颗卫星对目标可见性条件记为准则φ1;
8、推算出每一个目标在星网轨道坐标系内的方位角;
9、输出多目标轨迹信息,实现目标机动性能预估。
10、在上述的信号级星网全时全域探测性能预估方法,采用walker-δ星座方案;walker-δ星座方案通过整个星座卫星的总数t、星座轨道面的个数p、轨道面内卫星的个数t、轨道倾角δ描述;walker-δ星座方案中,各条轨道有相同的轨道倾角,节点按等间隔均匀分布。
11、在上述的信号级星网全时全域探测性能预估方法,星座内卫星均选择太阳同步圆轨道,且轨道高度设置成参数可调;选择回归轨道,实现区域连续、多重覆盖监测。
12、在上述的信号级星网全时全域探测性能预估方法,星座轨道动力学计算的方法为:
13、考虑摄动的条件下,建立参数化低轨大规模星网的星座动力学计算模型,计算目标精确动力学状态。
14、在上述的信号级星网全时全域探测性能预估方法,对目标进行红外或可见光成像过程模拟的方法为:
15、构建可见光或红外相机成像模型;其中,成像相机参数为视场角、分辨率、曝光时间、噪声特性;参数根据体系仿真试验时柔性构建试验场景的需求配置;
16、目标光学成像模拟:将成像模拟与目标或卫星的相对运动计算相结合,生成目标探测光学图像;
17、对目标探测光学图像进行预处理,即降噪与分割;进行边缘特征检测与匹配,提取目标可见光或红外特征,实现目标识别跟踪;
18、利用目标高速运动存在拖尾的成像特性,采用形心识别与探测光学图像相结合的方法,识别出目标形心位置,解算出当前时刻目标的方位角值。
19、在上述的信号级星网全时全域探测性能预估方法,单颗卫星对目标可见性条件记为准则φ1为:
20、
21、式中,角标s代表卫星;
22、角标i表示卫星在星座中的编号;
23、rs代表卫星位置矢量;
24、h代表卫星轨道高度;
25、t代表机动目标;
26、rt为目标位置矢量;
27、re为地球半径;
28、l为跟踪传感器的最大作用距离;
29、α代表卫星跟踪传感器伺服机构的最大摆角;
30、vsun代表太阳方向矢量;
31、θ为预先设定的两矢量之间最小夹角;θ当大于跟踪传感器视场角。
32、在上述的信号级星网全时全域探测性能预估方法,所述当前卫星的探测优先级具体为:
33、s1、根据各目标当前调度周期的剩余时间对下一周期的调度进行触发;
34、s2、若场景中存在多个优先级不同的目标,为各目标分配一个剩余时间阈值,记第j个目标的剩余时间阈值为tj;
35、s3、对于高优先级目标,该阈值分配得较大些;
36、s4、对于低优先级目标,该阈值分配得较小些;
37、s5、在各仿真时刻,对目标当前调度周期的剩余时间逐个进行检验。
38、在上述的信号级星网全时全域探测性能预估方法,对目标当前调度周期的剩余时间逐个进行检验的具体方法为:
39、s51、根据各目标的轨迹预报数据表,查取经过时间tj后的轨迹数据,检验其是否满足可见性条件;
40、s52、若某目标经过时间tj后的位置能够满足可见性条件,则说明该目标当前调度周期的剩余时间大于tj;
41、s53、否则,说明该目标当前调度周期的剩余时间小于tj,需对该目标触发下一周期的调度;
42、s54、在各个仿真时刻,根据可见性条件准则,对检测到剩余时间不足的目标进行下一周期的调度;
43、s55、若同时出现多个待调度目标,则为高优先级目标进行优先调度,以便为其就近分配传感器、提高跟踪精度;
44、s56、对于重点关注的时间段的新生目标,立即为其进行卫星调度;
45、s57、当同时存在高优先级目标和低优先级目标时,由上述算法知:若两种目标的当前调度周期同时结束,则算法首先检测到高优先级目标的剩余时间不足,从而优先为其分配传感器资源;若低优先级目标当前调度周期略早地比高优先级目标当前调度周期结束,算法将不受干扰,同样优先为高优先级目标分配传感器资源;
46、s58、若在某个仿真时刻存在待调度目标,但此时不存在空闲的可见卫星,则对可见卫星进行筛选;若某些可见卫星正在跟踪优先级较低的目标,令其中距离当前目标最近的卫星停止对低优先级目标的跟踪,转而跟踪当前目标;受星座传感器资源数量的约束,无法再对上述低优先级目标进行跟踪,此时将其目标轨迹预报数据传递给地面指控模拟系统,调用雷达模拟系统继续完成末段目标捕获与轨迹跟踪计算;
47、s59、若可见卫星均正在跟踪更高优先级的目标,则暂时放弃对待调度目标的轨迹跟踪,将其轨迹预报数据发送至地面指控模拟系统。
48、在上述的信号级星网全时全域探测性能预估方法,每一个目标在星网轨道坐标系内的方位角的推算方法为:
49、基于gpu加速并行计算平台进行大规模多星联动条件下多目标探测图像预处理、特征匹配计算,推算出每一个目标在星网轨道坐标系内的方位角。
50、在上述的信号级星网全时全域探测性能预估方法,所述多目标轨迹信息包括三维空间位置和速度信息。
51、本发明与现有技术相比的有益效果是:
52、(1)本发明提出的多星联动条件下的全时全域探测性能预估方法解决了上述大规模信号级星网探测条件下的多目标机动性能预估问题;
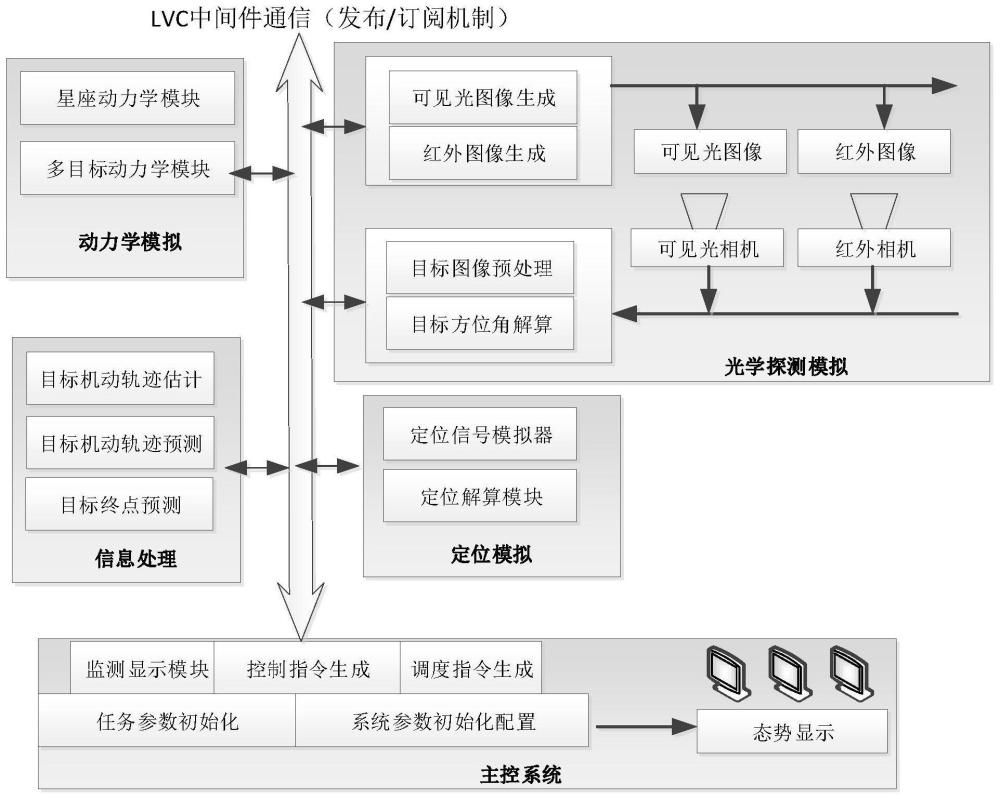
53、(2)本发明的方法兼容基于中间件的lvc仿真支撑架构,具备弹性扩展优点,可用于大规模星网体系探测模拟试验环境的构建;
54、(3)本发明实现体系级复杂对抗仿真试验验证评估,构建相应的信号级星网探测模拟系统,实现该系统在大规模多星联动条件下的全时全域探测性能预估的能力。
- 还没有人留言评论。精彩留言会获得点赞!