一种三维动态位移测量系统、测量方法及测量设备
本发明涉及精密位移测量技术,特别是涉及一种单光源激光反馈干涉三维动态位移测量系统、测量方法及测量设备。
背景技术:
1、精密位移测量在半导体制造、航空航天、精密加工等行业中发挥着重要作用。随着现代工业的不断发展,对精密位移测量的测量精度、测量维度和测量系统体积都提出了越来越高的要求。近年来,半导体激光反馈干涉技术以其结构简单紧凑、自准直、无需外部探测器等特性而备受关注。激光反馈干涉(也称为激光自混合干涉)发生在激光器的谐振腔内,激光器输出光被外部物体反射或散射后,其中部分光又被反馈回激光器的谐振腔,与谐振腔内光干涉,引起激光器的输出功率和频率的变化,实现速度、位移、振动及距离等物理量的精密测量。传统的激光反馈干涉仪多用于一维面外位移的测量,为了实现三维位移测量,需要将三个激光反馈干涉仪相互垂直安装,每个干涉仪用来传感一维位移。由于机械安装导致的三个干涉仪的正交误差是不可避免的。因此普通的激光反馈干涉仪难以实现单测量点多维度测量,会引入环境噪声和阿贝误差。
2、针对上述问题,中国专利zl 201911064533.5、zl202011095099.x分别公开了一种基于激光自混合干涉的三维位移测量系统及测量方法。通过在激光自混合干涉中引入反射式正交二维光栅,以实现单测量点三维动态位移的测量,消除了阿贝误差的影响。同时测量系统以光栅的栅距为测量基准,相比普通的激光反馈干涉系统,具有更好的稳定性及抗干扰能力。但所公开的测量系统中,均含有多个激光器以及电光晶体相位调制器,系统较为复杂且光路不易调节,电光晶体相位调制器的价格较为昂贵,提高了系统的成本。
技术实现思路
1、发明目的:本发明的目的是提供一种单光源半导体激光反馈干涉三维动态位移测量系统及测量方法,该系统无需添加额外的光学调制器件,仅使用一个半导体激光器同时作为光源和探测器,实现了三维动态位移的实时测量。
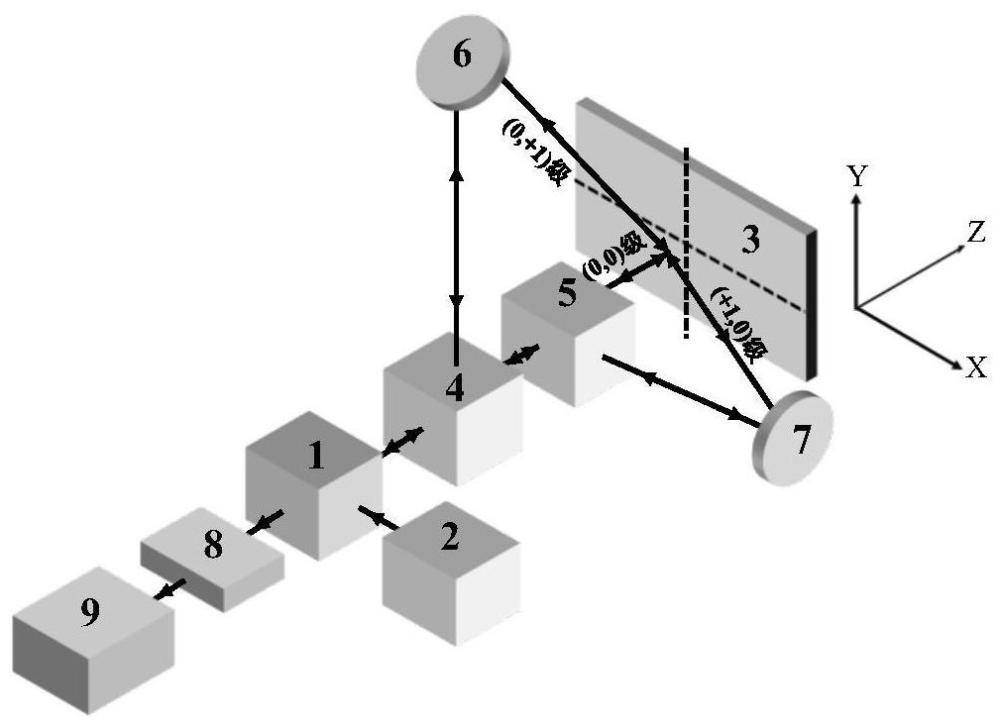
2、技术方案:本发明的一种三维动态位移测量系统,包括半导体激光器、反射式二维正交光栅、第一分光棱镜、第二分光棱镜、第一平面反射镜、第二平面反射镜、数据采集卡和计算机;
3、所述半导体激光器输出的光经第一分光棱镜透射,第二分光棱镜透射后以(0,0)级利特罗入射角垂直入射至反射式二维正交光栅;所述半导体激光器输出的光经第一分光棱镜反射,第一平面反射镜反射后以(0,+1)级利特罗角入射至反射式二维正交光栅;所述半导体激光器输出的光经第一分光棱镜透射,第二分光棱镜反射,第二平面反射镜反射后以(+1,0)级利特罗角入射至反射式二维正交光栅;反射式二维正交光栅的三束入射光对应的自准直衍射光分别沿原光路返回半导体激光器的谐振腔,与谐振腔内的光产生激光反馈干涉效应;干涉信号被半导体激光器内部集成的探测器接收,并输送到数据采集卡对激光反馈干涉信号进行数字化处理,计算机对数字化处理后的信号进行分析处理,得到待测三维动态位移。
4、可选的,所述反射式二维正交光栅上的两组光栅刻线相互垂直,其光栅矢量分别对应于x,y方向,且两组光栅周期d相同。
5、可选的,所述(0,+1)级利特罗入射角为对应于光栅矢量y方向的+1级利特罗入射角;所述(+1,0)级利特罗入射角为对应于光栅矢量x方向的+1级利特罗入射角。
6、可选的,所述(0,+1)级利特罗入射角和(+1,0)级利特罗入射角大小均为θ=arcsin(λ/2d),λ为半导体激光器的波长,d为反射式二维正交光栅上两组光栅刻线周期。
7、可选的,通过调整三路反馈光的外腔长度l1、l2、l3不同且光程差大于光源的相干长度,以保证激光反馈干涉信号中含有对应于三个外腔长度的三个载波频率fi,i=1,2,3。
8、可选的,该系统还包括激光器调制模块,所述激光器调制模块输出周期性锯齿波电流对半导体激光器进行线性调制。
9、基于相同的发明构思,本发明的一种三维动态位移测量方法,包括以下步骤:
10、激光器调制模块输出周期性锯齿波电流对半导体激光器进行线性调制;
11、半导体激光器输出的激光经过第一分光棱镜、第二分光棱镜、第一平面反射镜、第二平面反射镜后分为三束光,并入射至反射式二维正交光栅;
12、三束入射光对应的自准直衍射光分别沿原光路返回半导体激光器的谐振腔,调整三路反馈光的外腔长度li不同且光程差大于光源的相干长度,i=1,2,3;三路反馈光与激光器谐振腔内的光产生激光反馈干涉效应,激光反馈干涉信号被半导体激光器后端集成的光电探测器接收,并输送到数据采集卡;
13、数据采集卡对接收到的激光反馈干涉信号进行模数转换,并将转换后的信号输入计算机;
14、计算机对干涉信号进行频域处理,分别解调出三路反馈光相位变化量为根据三路反馈光相位变化量,计算反射式二维正交光栅在x、y、z方向的位移。
15、进一步的,计算机对干涉信号进行频域处理,具体为:对采集到的激光反馈干涉信号进行傅里叶变换,用带通滤波器滤出对应于三个外腔长度li的三组拍频信号,计算三组拍频信号的初始相位,分别用表示为:
16、
17、其中,为(0,0)级衍射光产生的相位变化,为(+1,0)级衍射光的总相位变化,为(0,+1)级衍射光的相位变化,△x、△y、△z分别为反射式二维正交光栅在x、y、z方向的位移;d为反射式二维正交光栅上的两组光栅周期;λ为半导体激光器的波长;θ为(0,+1)级、(+1,0)级利特罗入射角。
18、进一步的,反射式二维正交光栅在x、y、z方向的位移为:
19、
20、其中,△x、△y、△z分别为反射式二维正交光栅在x、y、z方向的位移;d为反射式二维正交光栅上的两组光栅刻线周期;λ为半导体激光器的波长;θ为(0,+1)级、(+1,0)级利特罗入射角。
21、基于相同的发明构思,本发明的一种三维动态位移测量设备,所述设备包括:
22、存储有可执行程序代码的存储器;
23、与所述存储器耦合的处理器;
24、所述处理器调用所述存储器中存储的所述可执行程序代码,执行如上述的三维动态位移测量方法。
25、有益效果:与现有技术相比,本发明将一个半导体激光器输出光分为三路,利用锯齿波电流线性调制半导体激光器,无需添加额外的光学调制器件,可以实现结构简单、易准直、低成本、高精度三维实时位移测量系统;本发明的优点具体为:
26、(1)本发明实现了单测量点的三维位移测量,克服了三个激光反馈干涉仪组合测量三维位移时难以避免的阿贝误差;
27、(2)本发明将反射式二维正交光栅引入激光反馈干涉仪,使得位移测量基准由波长变为相对稳定的光栅栅距,测量精度不受空气成份、压强、湿度以及光源波动的影响,整个测量系统的抗干扰能力更强;
28、(3)本发明仅使用一个半导体激光器同时作为光源和探测器,光路简单、易调节,无需添加额外的光学调制器件,大大降低了系统的复杂性和系统成本;
29、(4)本发明提出了采用周期性锯齿电流对半导体激光器进行线性调制,仅通过调整三束反馈光的光程不同就可以实现单光源光路系统对三维动态位移的实时测量,相位解调在频域内实现,解调算法简单,对采样误差不敏感,位移测量精度可达纳米量级;
30、(5)本发明形成了新的低复杂性、低成本、高精度、适用于工业现场测量的三维动态位移测量系统,对进一步推动先进制造技术的发展具有重要的现实意义。
- 还没有人留言评论。精彩留言会获得点赞!