适应机器人取气的变压器瓦斯集气盒的制作方法
本发明涉及变电维修,尤其涉及适应机器人取气的变压器瓦斯集气盒。
背景技术:
1、集气盒是气体继电器的一个组成部分。当变压器内部发生故障并释放气体或引起油流变压时,这会激活气体继电器,产生瓦斯动作信号,可能引发报警或跳闸。然而,当气体产生量较少时,气体继电器保持静止,但气体会通过铜导管进入集气盒。为了评估变压器的运行状况,作业人员定期从集气盒中提取气样进行色谱分析,以了解气体组成。
2、现有一项变压器气体集气智能机器人技术,可通过智能机器人采集瓦斯集气盒中的气体,实现更安全、高效的集气过程,同时减少人力和时间成本。
3、然而,这项技术存在一个缺陷:智能机器人机械臂上的取样接口是软管,无法自动识别和连接,需要人工干预以连接到设备气嘴,然后才能打开气阀进行气体采集。这阻碍了集气操作的全面自动化和智能化,同时使得作业人员可能面临由气体泄漏导致的中毒、爆炸等安全风险,并降低了取气的效率。
4、为了解决这个问题,需要适应机器人取气的变压器瓦斯集气盒,以实现完全自动化和智能化的集气操作。
技术实现思路
1、针对以上不足,本发明提供适应机器人取气的变压器瓦斯集气盒,能够无需人工介入,实现智能机器人与变压器瓦斯集气盒的自动对接和取气,减少人力和时间成本,避免了人工介入时可能会对工作人员造成的危害的情况,具体技术方案如下:
2、适应机器人取气的变压器瓦斯集气盒,包括集气盒本体、手动球阀、气体继电器连接管和排气管,所述集气盒主体顶部分别安装有排气管和气体继电器连接管,所述排气管原理集气盒主体的一端开口安装有手动球阀;
3、还包括取气单元,所述取气单元包括取气座和取气头,所述取气座安装在排气管侧壁,所述取气头安装在智能机器人取气接口上;所述集气盒本体通过取气座和取气头配合实现自动开启和关闭,使得智能机器人实现自动取气。
4、优选的,所述取气座包括弹簧、阀杆、阀套、阀盖、內丝转接套、磁吸部和密封圈,所述內丝转接套一端通过螺纹连接安装在所述排气管侧壁上,所述內丝转接套的另一端通过螺纹连接安装有阀套,所述阀杆滑动安装在阀套内,所述弹簧收容在內丝转接套内且弹性抵持阀杆,所述阀杆侧壁上圆周阵列开设有多个通气孔,所述阀杆外侧壁上沿阀杆轴线安装有两个密封圈,所述通气孔位于密封圈之间的区域,所述阀盖连接在阀套远离排气管的一端,所述磁吸部套装在阀盖远离阀套的一端,所述阀盖上开设有与所述取气头配合的第一通孔;当所述阀杆未被推动时,所述阀杆靠近弹簧的一端在弹簧的作用下与阀套相抵,使得两个所述密封圈均被阀套覆盖。
5、优选的,所述第一通孔开口边缘处设有用于辅助定位圆角。
6、优选的,所述取气头包括顶杆、电磁铁和取气管,所述取气管安装在所述智能机器人的取气接口上,所述电磁铁安装在取气管远离智能机器人的一端,所述顶杆安装在电磁铁远离取气管的一侧,所述顶杆和电磁铁上均开设有第二通孔,所述第二通孔的轴线与取气管的轴线重合。
7、优选的,所述磁吸部由多块第一磁铁和第二磁铁交替设置组成,所述第一磁铁和第二磁铁远离所述排气管一侧的磁场方向相反,所述电磁铁的磁场分布与磁吸部相对应。
8、优选的,所述顶杆为锥形。
9、优选的,所述磁吸部远离所述排气管的一侧安装有弹性密封圈。
10、与现有技术相比,本发明的有益效果是:
11、1.本发明通过在变压器瓦斯集气盒的排气管上安装取气座,同时在智能机器人的取气接口上安装取气头,取气座在与取气头对接前,会自动封闭排气管,在与取气头对接后,自动打开排气管,两者配合可以实现智能机器人与变压器瓦斯集气盒的自动对接,并进行取气,避免了人工介入,减少人力和时间成本,提高了取气的效率,实现检修作业智能化。
12、2.本发明通过将阀盖的第一通孔边缘处设置圆角,同时将顶杆设置为锥形,通过圆角与锥形顶杆的配合,方便取气座与取气头进行定位对接,提高了取气效率,同时避免顶杆与取气座发生碰撞,造成顶杆和取气座损坏的情况发生。
13、3.本发明通过在阀盖上安装磁吸部,磁吸部由多块第一磁铁和第二磁铁交替设置组成,第一磁铁和第二磁铁远离排气管一侧的磁场方向相反,电磁铁的磁场分布与磁吸部相对应,通过对应磁场的吸引和限制,实现取气座与取气头的快速正确对接,提高了取气效率,实现检修作业智能化。
技术特征:
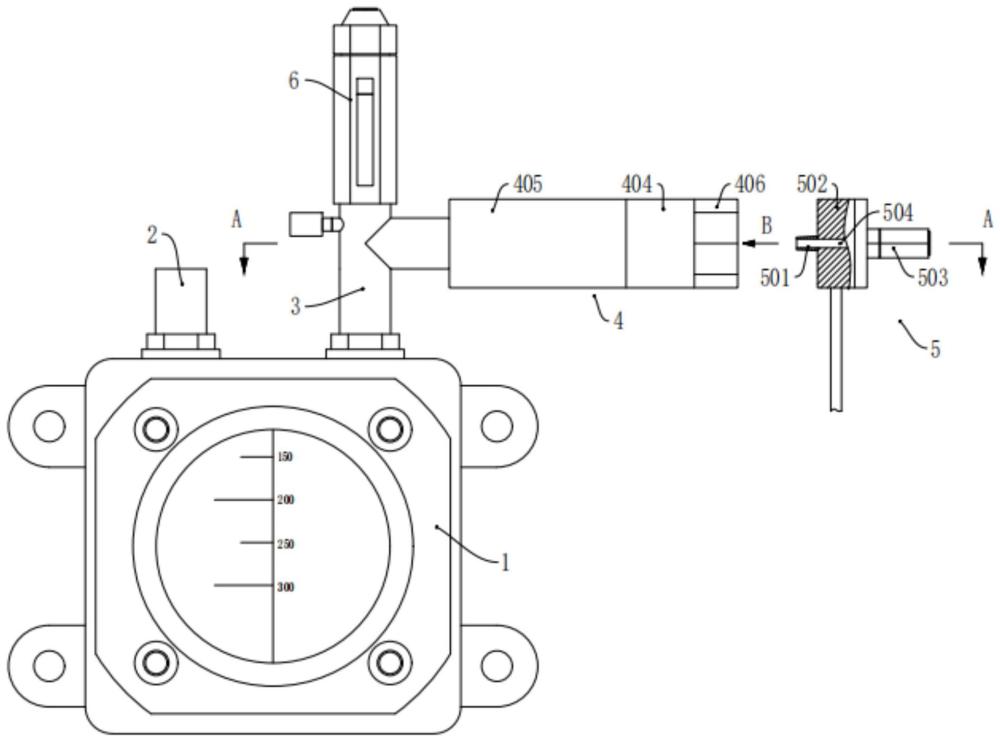
1.适应机器人取气的变压器瓦斯集气盒,包括集气盒本体(1)、手动球阀(6)、气体继电器连接管(2)和排气管(3),所述集气盒主体顶部分别安装有排气管(3)和气体继电器连接管(2),所述排气管(3)原理集气盒主体的一端开口安装有手动球阀(6);
2.根据权利要求1所述的适应机器人取气的变压器瓦斯集气盒,其特征在于,所述取气座(4)包括弹簧(401)、阀杆(402)、阀套(403)、阀盖(404)、內丝转接套(405)、磁吸部(406)和密封圈(407),所述內丝转接套(405)一端通过螺纹连接安装在所述排气管(3)侧壁上,所述內丝转接套(405)的另一端通过螺纹连接安装有阀套(403),所述阀杆(402)滑动安装在阀套(403)内,所述弹簧(401)收容在內丝转接套(405)内且弹性抵持阀杆(402),所述阀杆(402)侧壁上圆周阵列开设有多个通气孔(408),所述阀杆(402)外侧壁上沿阀杆(402)轴线安装有两个密封圈(407),所述通气孔(408)位于密封圈(407)之间的区域,所述阀盖(404)连接在阀套(403)远离排气管(3)的一端,所述磁吸部(406)套装在阀盖(404)远离阀套(403)的一端,所述阀盖(404)上开设有与所述取气头(5)配合的第一通孔(409);当所述阀杆(402)未被推动时,所述阀杆(402)靠近弹簧(401)的一端在弹簧(401)的作用下与阀套(403)相抵,使得两个所述密封圈(407)均被阀套(403)覆盖。
3.根据权利要求2所述的适应机器人取气的变压器瓦斯集气盒,其特征在于,所述第一通孔(409)开口边缘处设有用于辅助定位圆角。
4.根据权利要求1所述的适应机器人取气的变压器瓦斯集气盒,其特征在于,所述取气头(5)包括顶杆(501)、电磁铁(502)和取气管(503),所述取气管(503)安装在所述智能机器人的取气接口上,所述电磁铁(502)安装在取气管(503)远离智能机器人的一端,所述顶杆(501)安装在电磁铁(502)远离取气管(503)的一侧,所述顶杆(501)和电磁铁(502)上均开设有第二通孔(504),所述第二通孔(504)的轴线与取气管(503)的轴线重合。
5.根据权利要求4所述的适应机器人取气的变压器瓦斯集气盒,其特征在于,所述磁吸部(406)由多块第一磁铁(7)和第二磁铁(8)交替设置组成,所述第一磁铁(7)和第二磁铁(8)远离所述排气管(3)一侧的磁场方向相反,所述电磁铁(502)的磁场分布与磁吸部(406)相对应。
6.根据权利要求4所述的适应机器人取气的变压器瓦斯集气盒,其特征在于,所述顶杆(501)为锥形。
7.根据权利要求1所述的适应机器人取气的变压器瓦斯集气盒,其特征在于,所述磁吸部(406)远离所述排气管(3)的一侧安装有弹性密封圈。
技术总结
本发明公开了适应机器人取气的变压器瓦斯集气盒,涉及变电维修技术领域,包括集气盒本体、手动球阀、气体继电器连接管和排气管,所述集气盒主体顶部分别安装有排气管和气体继电器连接管,所述排气管原理集气盒主体的一端开口安装有手动球阀;还包括取气单元,所述排气管的侧壁上设有取气单元,所述取气单元包括取气座和取气头,所述取气座安装在排气管侧壁,所述取气头安装在智能机器人取气接口上;所述集气盒本体通过取气座和取气头配合实现自动开启和关闭。本发明能够无需人工介入,实现智能机器人与变压器瓦斯集气盒的自动对接和取气,减少人力和时间成本,避免了人工介入时可能会对工作人员造成的危害的情况。
技术研发人员:陈三伟,梁洛耕,韦阳健,吴春梅,韦富方,梁振燊,王刚,韦宝其,梁伟新,陈炜智,犹豪,王叶
受保护的技术使用者:广西电网有限责任公司柳州供电局
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!