一种利用姿态敏感器的卫星天文导航计算方法与流程
本发明属于航空航天,应用于卫星的自主导航,利用星敏感器与太阳敏感器计算出卫星的位置,特别是涉及一种利用姿态敏感器的卫星天文导航计算方法。
背景技术:
1、导航定位技术在各种民用和军事领域显示出越来越重要的作用,低轨微小卫星要求轨道确定系统重量轻、功耗低、可靠性高且成本低。而目前卫星的轨道确定和预报一般依靠地面测控的支持,自主性不高,部分卫星通过搭载gps接收机实现自主定轨,但成本较高且存在人为干扰的问题。在目前常用的导航技术中,单一使用某种技术存在很多不足:惯性导航系统短时间内精度高,但是由于惯性器件会有累积误差,因此不适合长时间导航;无线电导航设备简单可靠、精度较高,但是信号容易受到屏蔽和干扰,而且导航基站本身也容易被攻击。因此研究高效率且低成本的自主定轨技术是非常必要的。
2、天文导航是一种自主导航方法,能够通过观测天体信息获得实时准确的导航信息。近年来,利用日月信息进行卫星自主定轨的天文导航技术受到了极大的关注。太阳是人类最熟悉的自然天体,其运动规律最清楚,光学特征最突出且容易识别,可用于卫星的位置导航。
3、本发明利用卫星星上的姿态敏感器:星敏感器和太阳敏感器进行卫星自主导航,不需要额外增加其他硬件设备,从而减少卫星导航系统的成本和重量。特别近十几年来,随着电子技术的发展,姿态敏感器测量精度有了较大提高,将星敏感器和太阳敏感器用于自主确定卫星的轨道信息具有重大的工程意义。
技术实现思路
1、本发明目的是为了解决现有技术中的问题,提出了一种利用姿态敏感器的卫星天文导航计算方法。
2、本发明是通过以下技术方案实现的,本发明提出一种利用姿态敏感器的卫星天文导航计算方法,所述方法包括以下步骤:
3、步骤一、描述卫星的空间位置;
4、步骤二、卫星轨道周期t、半长轴a与倾角i的确定;
5、步骤三、太阳方位的确定;
6、步骤四、日期的确定;
7、步骤五、轨道圈数的确定,从而完成计算。
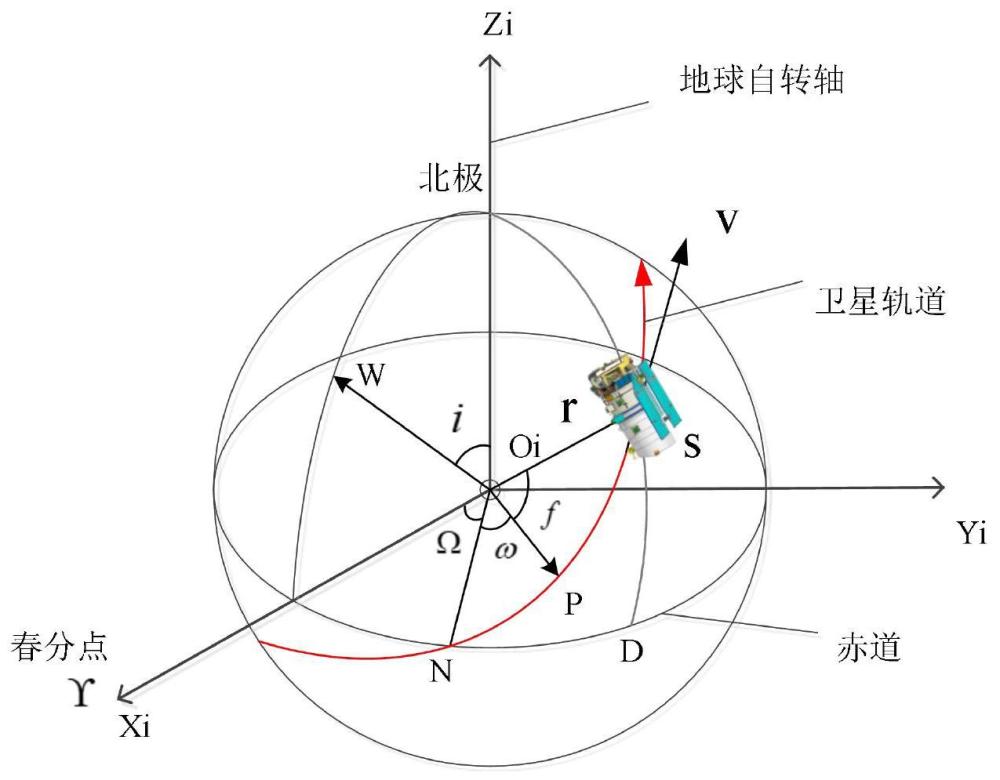
8、进一步地,在步骤一中,定义赤道惯性坐标系oixiyizi:坐标原点oi位于地球中心,xi轴沿地球赤道面与黄道面的交线,指向春分点υ;zi轴指向北极;yi轴在赤道平面上垂直于xi轴。
9、进一步地,在步骤二中,卫星六个面各安装1个01太阳敏感器,以保证在阳照区至少有一个01太敏见太阳;通过两次卫星由地影区进阳照区时的时间间隔,计算出轨道周期t;由开普勒第三定律可知,卫星轨道周期与半长轴a的关系为:
10、
11、从而可得轨道半长轴a。
12、进一步地,在步骤二中,卫星轨道面在地球非球形引力摄动下,只考虑带谐项j2的长期摄动,则升交点赤经变化率在轨道一周内的平均值为:
13、
14、其中:n为轨道平均转速,引力常数μ=3.986006×105km3/s2,带谐项摄动系数j2=0.001082,re=6378.145km,i为轨道倾角,a为轨道半长轴,e为轨道偏心率。
15、进一步地,在步骤二中,对于太阳同步轨道,卫星轨道面的进动角速度与平太阳在赤道上移动的角速度相等;平太阳沿赤道作周年视运动,回归年长度为365.2422平太阳日,因此,平太阳在赤道上移动的角速度为:
16、
17、结合式(2)与(3),假设轨道偏心率为e=0,即认为轨道为圆形,则太阳同步轨道升交点赤经ω在一天内的变化量为:
18、
19、将半长轴a带入式(4)可得轨道倾角i。
20、进一步地,在步骤三中,卫星六个面各安装1个数字太阳敏感器,以保证在阳照区至少有一个数字太敏见太阳;
21、数字太敏测量值包括矢量x与矢量y;其中,矢量x定义为太阳方向矢量在数字太敏坐标系xoz平面的投影与+z轴的夹角;矢量y定义为在数字太敏坐标系yoz平面的投影与+z轴的夹角,则矢量x、y与的关系为:
22、
23、根据数字太敏在星上的安装位置可得太阳方向矢量在卫星本体坐标系下的分量为:
24、
25、卫星安装星敏感器,测量出赤道惯性坐标系到星敏感器坐标系的转换四元数根据星敏感器在星上的安装位置得到赤道惯性坐标系到卫星本体坐标系obxbybzb的姿态转换四元数为:
26、
27、结合式(6)与(7),则太阳方向矢量在赤道惯性坐标系下的分量为:
28、
29、令卫星保持惯性空间稳定姿态,则为常值。
30、进一步地,在步骤四中,地球绕太阳自西向东旋转,黄道面与赤道面的交角α=23.43°;定义地心黄道坐标系osxsyszs:坐标原点os位于地球中心,xs轴沿地球赤道面与黄道面的交线,指向春分点υ;zs轴指向黄北极;ys轴在黄道平面上垂直于xs轴;
31、赤道惯性坐标系到地心黄道坐标系的姿态转换四元数为:
32、
33、结合式(8)与(9),太阳方向矢量在地心黄道坐标系下的分量为:
34、
35、在xsosys平面内旋转,与osxs轴的夹角为:
36、
37、θ∈(-180°,180°],θ=0°代表此时为春分,根据θ可计算出当前日期。
38、进一步地,在步骤五中,根据轨道周期t,卫星每天绕地球运行的总圈数n=24/t;由式(4)可知,太阳同步轨道升交点赤经在一天内的变化量为δω=0.9856°,则卫星每圈的升交点赤经变化量为:
39、
40、结合式(11)与(12),根据太阳方向矢量与osxs轴夹角θ的增量dθ,可计算出卫星所在的圈数为第dθ/dω圈。
41、本发明的有益效果:
42、本发明提出了一种利用姿态敏感器的卫星天文导航计算方法,本发明所述方法所设计的利用星敏感器与太阳敏感器进行卫星自主导航,可有效计算出卫星轨道周期t、半长轴a、倾角i与当前日期、轨道圈数。该方法原理简单,易于实现,能够应用于工程实际中。
技术特征:
1.一种利用姿态敏感器的卫星天文导航计算方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,在步骤一中,定义赤道惯性坐标系oixiyizi:坐标原点oi位于地球中心,xi轴沿地球赤道面与黄道面的交线,指向春分点υ;zi轴指向北极;yi轴在赤道平面上垂直于xi轴。
3.根据权利要求2所述的方法,其特征在于,在步骤二中,卫星六个面各安装1个01太阳敏感器,以保证在阳照区至少有一个01太敏见太阳;通过两次卫星由地影区进阳照区时的时间间隔,计算出轨道周期t;由开普勒第三定律可知,卫星轨道周期与半长轴a的关系为:
4.根据权利要求3所述的方法,其特征在于,在步骤二中,卫星轨道面在地球非球形引力摄动下,只考虑带谐项j2的长期摄动,则升交点赤经变化率在轨道一周内的平均值为:
5.根据权利要求4所述的方法,其特征在于,在步骤二中,对于太阳同步轨道,卫星轨道面的进动角速度与平太阳在赤道上移动的角速度相等;平太阳沿赤道作周年视运动,回归年长度为365.2422平太阳日,因此,平太阳在赤道上移动的角速度为:
6.根据权利要求5所述的方法,其特征在于,在步骤三中,卫星六个面各安装1个数字太阳敏感器,以保证在阳照区至少有一个数字太敏见太阳;
7.根据权利要求6所述的方法,其特征在于,在步骤四中,地球绕太阳自西向东旋转,黄道面与赤道面的交角α=23.43°;定义地心黄道坐标系osxsyszs:坐标原点os位于地球中心,xs轴沿地球赤道面与黄道面的交线,指向春分点υ;zs轴指向黄北极;ys轴在黄道平面上垂直于xs轴;
8.根据权利要求7所述的方法,其特征在于,在步骤五中,根据轨道周期t,卫星每天绕地球运行的总圈数n=24/t;由式(4)可知,太阳同步轨道升交点赤经在一天内的变化量为δω=0.9856°,则卫星每圈的升交点赤经变化量为:
技术总结
本发明提出一种利用姿态敏感器的卫星天文导航计算方法。本发明所述方法利用卫星星上的姿态敏感器:星敏感器和太阳敏感器进行卫星自主导航,不需要额外增加其他硬件设备,从而减少卫星导航系统的成本和重量。特别近十几年来,随着电子技术的发展,姿态敏感器测量精度有了较大提高,将星敏感器和太阳敏感器用于自主确定卫星的轨道信息具有重大的工程意义。
技术研发人员:戴路,范林东,韩霜雪,孟德利,刘东宸
受保护的技术使用者:长光卫星技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!