一种基于TCN和LSTM的车辆融合定位方法与流程
本发明涉车辆定位,尤其涉及一种基于tcn和lstm的车辆融合定位方法。
背景技术:
1、在对车辆进行定位追踪时,现有的定位方法,如公开号为“cn116817927a”、名称为“双滤波器组合导航定位与测姿方法、电子设备及介质”的中国专利中公开的定位方法,其一般采用卡尔曼滤波对惯性性测量单元及卫星数据进行处理,以实现对目标车辆的实时定位追踪。
2、这种车辆定位方法虽然定位精度高,但其依赖于卫星数据的实时传输。实际应用时,车辆经常会由于场地、地形、天气等原因出现卫星信号暂时或长时间丢失的情况。卫星信号一旦丢失,卡尔曼滤波无法通过卫星定位数据,并结合惯性测量单元的数据对车辆的位置进行实时预测及定位,从而降低了车辆定位的可靠性。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种卫星信号丢失时仍可对车辆进行可靠定位的基于tcn和lstm的车辆融合定位方法。
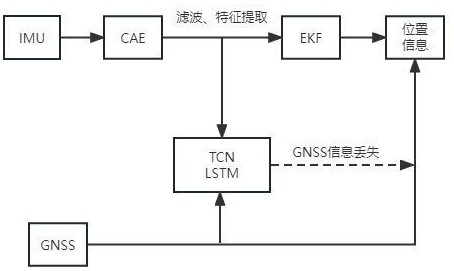
2、本发明的基于tcn和lstm的车辆融合定位方法,包括:
3、获取车辆imu输出的车辆数据的步骤,imu为惯性测量单元;
4、获取车辆gnss的定位信息的步骤,gnss为全球导航卫星系统;
5、通过扩展卡尔曼滤波器融合imu输出的车辆数据及gnss的定位信息,并由扩展卡尔曼滤波器输出车辆定位所需位置数据的步骤;
6、当车辆的gnss定位信息丢失时,通过以下步骤获取车辆定位所需的位置数据;
7、判断车辆的gnss定位信息是短期丢失还是长期丢失;
8、如果车辆的gnss定位信息是短期丢失,则将车辆imu输出的车辆数据输入tcn神经网络,再将tcn神经网络预测的gnss车辆定位信息,及车辆imu输出的车辆数据,输入扩展卡尔曼滤波器,最终由扩展卡尔曼滤波器输出车辆定位所需的位置数据;
9、如果车辆的gnss定位信息是长期丢失,则将车辆imu输出的车辆数据输入lstm神经网络,再将lstm神经网络预测的gnss车辆定位信息,及车辆imu输出的车辆数据,输入扩展卡尔曼滤波器,最终由扩展卡尔曼滤波器输出车辆定位所需的位置数据。
10、进一步的,本发明的基于tcn和lstm的车辆融合定位方法,imu输出的车辆数据在输入扩展卡尔曼滤波器之前通过cae进行滤波和降噪,经cae滤波降噪后的imu车辆数据再输入至扩展卡尔曼滤波器。
11、进一步的,本发明的基于tcn和lstm的车辆融合定位方法,tcn和lstm神经网络可通过以下方法进行训练;
12、将通过cae滤波降噪后的imu车辆数据输入tcn神经网络和lstm神经网络进行训练,将滤波降噪后的imu车辆数据设为上述神经网络的输入,所获得的gnss车辆信息设为上述神经网络的目标输出,从而对其进行训练,最终获得训练好的tcn和lstm神经网络模型。
13、进一步的,本发明的基于tcn和lstm的车辆融合定位方法,判断车辆的gnss定位信息是短期丢失还是长期丢失,可通过以下方法实现;
14、如果ltcn < llstm,且gnss信号丢失时预测的时间步t < 100,则判定gnss信号短期丢失;
15、如果ltcn > llstm,且gnss信号丢失时预测的时间步t >100,则判定gnss信号长期丢失。
16、本发明的基于tcn和lstm的车辆融合定位方法,通过训练好的tcn神经网络或lstm神经网络,输出预测的gnss车辆定位信息,并用其替代gnss定位信息丢失的车辆位置信息,结合imu输出的车辆数据,作为扩展卡尔曼滤波器的输入,进而得到车辆定位所需的位置数据。由于tcn神经网络及ltsm神经网络的已经imu车辆数据及gnss定位信息训练,这样,即使gnss定位信息短息或长期丢失,车辆也能够通过训练好的tcn或lstm网络模型,得到精确可靠的位置数据,相较于现有的车辆定位方法,其可靠性更高。
17、上述说明仅是本发明技术方案的概述,为了能够更清楚地了解本发明的技术手段,并依照说明书的内容予以具体实施,以下以本发明的实施例对其进行详细说明。
技术特征:
1.一种基于tcn和lstm的车辆融合定位方法,包括;
2.根据权利要求1所述的基于tcn和lstm的车辆融合定位方法,其特征在于:imu输出的车辆数据在输入扩展卡尔曼滤波器之前通过cae进行滤波和降噪,经cae滤波降噪后的imu车辆数据再输入至扩展卡尔曼滤波器。
3.根据权利要求2所述的基于tcn和lstm的车辆融合定位方法,其特征在于:tcn和lstm神经网络可通过以下方法进行训练;
4.根据权利要求1所述的基于tcn和lstm的车辆融合定位方法,其特征在于:
技术总结
本发明涉及一种基于TCN和LSTM的车辆融合定位方法,包括获取车辆IMU输出的车辆数据的步骤,获取车辆GNSS的定位信息的步骤,通过扩展卡尔曼滤波器融合IMU车辆数据及GNSS定位信息的步骤;当车辆GNSS定位信息短期丢失,则将IMU车辆数据输入TCN,再将TCN预测的GNSS车辆定位信息及IMU车辆数据,输入扩展卡尔曼滤波器,最终输出车辆定位所需的位置数据,当车辆GNSS定位信息长期丢失,则将IMU车辆数据输入LSTM,再将LSTM的输出及车辆IMU车辆数据,输入扩展卡尔曼滤波器。本发明的基于TCN和LSTM的车辆融合定位方法在卫星信号丢失时仍可对车辆进行可靠定位。
技术研发人员:张伟,张健,赵奉奎,曹伟,董洲,吴天余
受保护的技术使用者:江苏省特种设备安全监督检验研究院
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!