车辆定位跳变检验方法、装置及设备与流程
本技术涉及车辆定位,尤其涉及一种车辆定位跳变检验方法、装置及设备。
背景技术:
1、跳变是指位置数据的突然跳变或跳跃,如在短时间内从一个位置突然跳转到另一个位置。由于高精地图因法规要求无法输出高度信息,在高架场景下若上下车道线数量宽度等一致时,容易发生错误的垂直跳变,即车辆实际位于高架上,却错误的将车辆定位于高架下,或车辆实际位于高架下,却错误的将车辆定位于高架上。
技术实现思路
1、本技术提供一种车辆定位跳变检验方法、装置及设备,旨在解决在高架场景下若上下车道线数量宽度等一致时,容易发生错误的垂直跳变的技术问题。
2、第一方面,本技术实施例提供一种车辆定位跳变检验方法,所述车辆定位跳变检验方法包括:
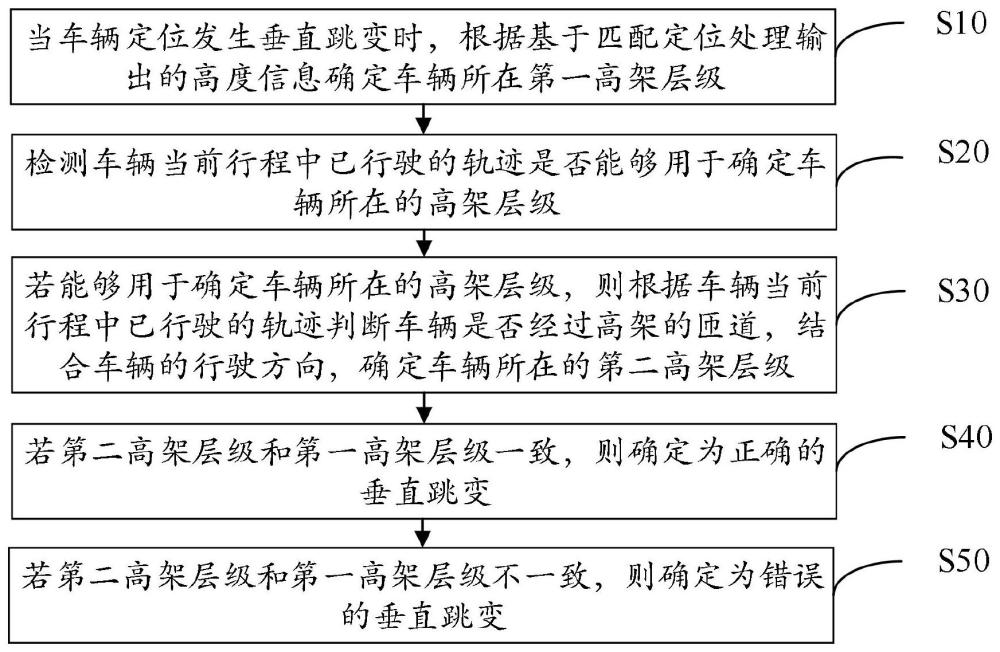
3、当车辆定位发生垂直跳变时,根据基于匹配定位处理输出的高度信息确定车辆所在第一高架层级;
4、检测车辆当前行程中已行驶的轨迹是否能够用于确定车辆所在的高架层级;
5、若能够用于确定车辆所在的高架层级,则根据车辆当前行程中已行驶的轨迹判断车辆是否经过高架的匝道,结合车辆的行驶方向,确定车辆所在的第二高架层级;
6、若第二高架层级和第一高架层级一致,则确定为正确的垂直跳变;
7、若第二高架层级和第一高架层级不一致,则确定为错误的垂直跳变。
8、可选的,在所述检测车辆当前行程中已行驶的轨迹是否能够用于确定车辆所在的高架层级之后,包括:
9、若不能够用于确定车辆所在的高架层级,则根据搜星数确定车辆所在的第三高架层级,根据道路感知识别确定车辆所在的第四高架层级,根据车辆的行驶规划路径确定车辆所在的第五高架层级;
10、若第三高架层级、第四高架层级及第五高架层级均与第一高架层级一致,则确定为正确的垂直跳变;
11、若第三高架层级、第四高架层级及第五高架层级不完全与第一高架层级一致,则确定为错误的垂直跳变。
12、可选的,所述检测车辆当前行程中已行驶的轨迹是否能够用于确定车辆所在的高架层级包括:
13、若车辆当前行程中已行驶的轨迹中数据点的数量少于预设数量,或车辆当前行程中已行驶的轨迹全部在高架内部区域,则确定车辆当前行程中已行驶的轨迹不能够用于确定车辆所在的高架层级;
14、若车辆当前行程中已行驶的轨迹中数据点的数量大于等于预设数量,且车辆当前行程中已行驶的轨迹不全部在高架内部区域,则确定车辆当前行程中已行驶的轨迹能够用于确定车辆所在的高架层级。
15、可选的,在所述确定为错误的垂直跳变之后,包括:
16、输出高架层级错误提醒,以供终端输入确认高架层级;
17、当接收到终端输入的确认高架层级时,调整车辆定位中车辆所在的高架层级为确认高架层级。
18、可选的,所述根据搜星数确定车辆所在的第三高架层级包括:
19、若搜星数大于预设搜星数,且在预设时长内搜星数的变化数量小于预设变化数量,则确定车辆所在的第三高架层级为高架的最上层,否则,确定车辆所在的第三高架层级为不在高架的最上层。
20、可选的,所述车辆定位跳变检验方法还包括:
21、当车辆定位发生水平跳变时,检测基于组合导航处理和匹配定位处理输出的车辆所在车道是否一致;
22、若一致,则确定为正确的水平跳变,若不一致,则确定为错误的水平跳变;
23、若为正确的水平跳变,则将基于融合定位处理输出的车辆定位向发生水平跳变后基于匹配定位处理输出的车辆定位进行位置平滑;
24、若为错误的水平跳变,则将基于惯性传感器采用航迹递推算法得到的车辆定位作为基于融合定位处理的输出,并将基于融合定位处理输出的车辆定位的置信度持续降低;
25、在置信度持续降低后,检测匹配定位是否恢复,若恢复,则将基于匹配定位处理输出的车辆定位重新作为融合定位的输入。
26、可选的,所述检测匹配定位是否恢复包括:
27、当置信度持续降低的时长小于预设时长时,若基于融合定位处理和匹配定位处理输出的车辆所在车道一致,且基于融合定位处理和匹配定位处理输出的车辆定位之间的差值小于第一预设差值,则确定为匹配定位恢复,否则确定为匹配定位未恢复;
28、当置信度持续降低的时长大于等于预设时长时,若基于融合定位处理和匹配定位处理输出的车辆所在车道一致,且基于组合导航处理和匹配定位处理输出的车辆所在车道一致,且基于融合定位处理和匹配定位处理输出的车辆定位之间的差值小于第一预设差值,且基于组合导航处理和匹配定位处理输出的车辆定位之间的差值小于第二预设差值,则确定为匹配定位恢复,否则确定为匹配定位未恢复。
29、可选的,在所述当车辆定位发生水平跳变时,检测基于组合导航处理和匹配定位处理输出的车辆所在车道是否一致之前,包括:
30、当基于匹配定位处理输出的车辆所在车道发生变化时,根据进行匹配定位前和后的基于匹配定位处理输出的航向角和经纬度计算得到进行匹配定位前和后的车辆定位之间的第一横向距离和第一纵向距离;
31、使用匹配定位前的车辆横向速度乘以匹配定位前和后之间的时长,得到第二横向距离;
32、使用匹配定位前的车辆纵向速度乘以匹配定位前和后之间的时长,得到第第二纵向距离;
33、使用第二纵向距离乘以预设放大系数,得到第三纵向距离;
34、若第一横向距离大于第二横向距离,且第一纵向距离大于第三纵向距离,则确定车辆定位发生水平跳变。
35、第二方面,本技术实施例提供了一种车辆定位跳变检验装置,所述车辆定位跳变检验装置包括:
36、第一确定模块,用于当车辆定位发生垂直跳变时,根据基于匹配定位处理输出的高度信息确定车辆所在第一高架层级;
37、检测模块,用于检测车辆当前行程中已行驶的轨迹是否能够用于确定车辆所在的高架层级;
38、第二确定模块,用于若能够用于确定车辆所在的高架层级,则根据车辆当前行程中已行驶的轨迹判断车辆是否经过高架的匝道,结合车辆的行驶方向,确定车辆所在的第二高架层级;
39、第三确定模块,用于若第二高架层级和第一高架层级一致,则确定为正确的垂直跳变;
40、第四确定模块,用于若第二高架层级和第一高架层级不一致,则确定为错误的垂直跳变。
41、第三方面,本技术实施例提供了一种车辆定位跳变检验设备,所述车辆定位跳变检验设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的车辆定位跳变检验程序,其中所述车辆定位跳变检验程序被所述处理器执行时,实现如上述所述的车辆定位跳变检验方法的步骤。
42、本技术实施例提供的技术方案带来的有益效果包括:
43、本技术实施例中,当车辆定位发生垂直跳变时,根据基于匹配定位处理输出的高度信息确定车辆所在第一高架层级;检测车辆当前行程中已行驶的轨迹是否能够用于确定车辆所在的高架层级;若能够用于确定车辆所在的高架层级,则根据车辆当前行程中已行驶的轨迹判断车辆是否经过高架的匝道,结合车辆的行驶方向,确定车辆所在的第二高架层级;若第二高架层级和第一高架层级一致,则确定为正确的垂直跳变;若第二高架层级和第一高架层级不一致,则确定为错误的垂直跳变。本技术实施例通过,当发生垂直跳变时,如果能够通过车辆当前行程中已行驶的轨迹来确定车辆所在的高架层级,则根据车辆当前行程中已行驶的轨迹判断车辆是否经过高架的匝道以及结合车辆的行驶方向确定高架层级,和根据匹配定位得到的高架层级进行对比,判定垂直跳变是否正确,从而能够针对高架场景下若上下车道线数量宽度等一致发生垂直跳变时,对匹配定位输出的高架层级进行判定,提升车辆定位的准确性。
- 还没有人留言评论。精彩留言会获得点赞!