一种基于无人机激光雷达的高速公路路基高边坡位移监测的方法与流程
本发明涉及通信领域,尤其涉及一种基于无人机激光雷达的高速公路路基高边坡位移监测的方法。
背景技术:
1、高速公路高边坡的安全性是高速公路建设中的重要问题之一。高边坡的稳定性直接影响到高速公路的运营安全。在建设高速公路时,必须考虑到高边坡的设计和防护,以确保其在运营期间能够保持稳定和安全。位移监测技术是保障高边坡安全性的重要手段之一。其中,大地测量法是一种常用的监测方法,可以由运维人员在边坡附近架设测量仪器,通过测量边坡上的控制点,获取边坡的水平和垂直位移。
2、但是,这种方式需要人员去往实际进行维护和控制,成本比较高,且监测效率和便捷性也不是很好。
技术实现思路
1、本发明实施例提供一种基于无人机激光雷达的高速公路路基高边坡位移监测的方法,用以通过无人机实现高速公路路基高边坡位移监测,能够降低成本,且监测效率和便捷性都很高。
2、为达到上述目的,本发明采用如下技术方案:
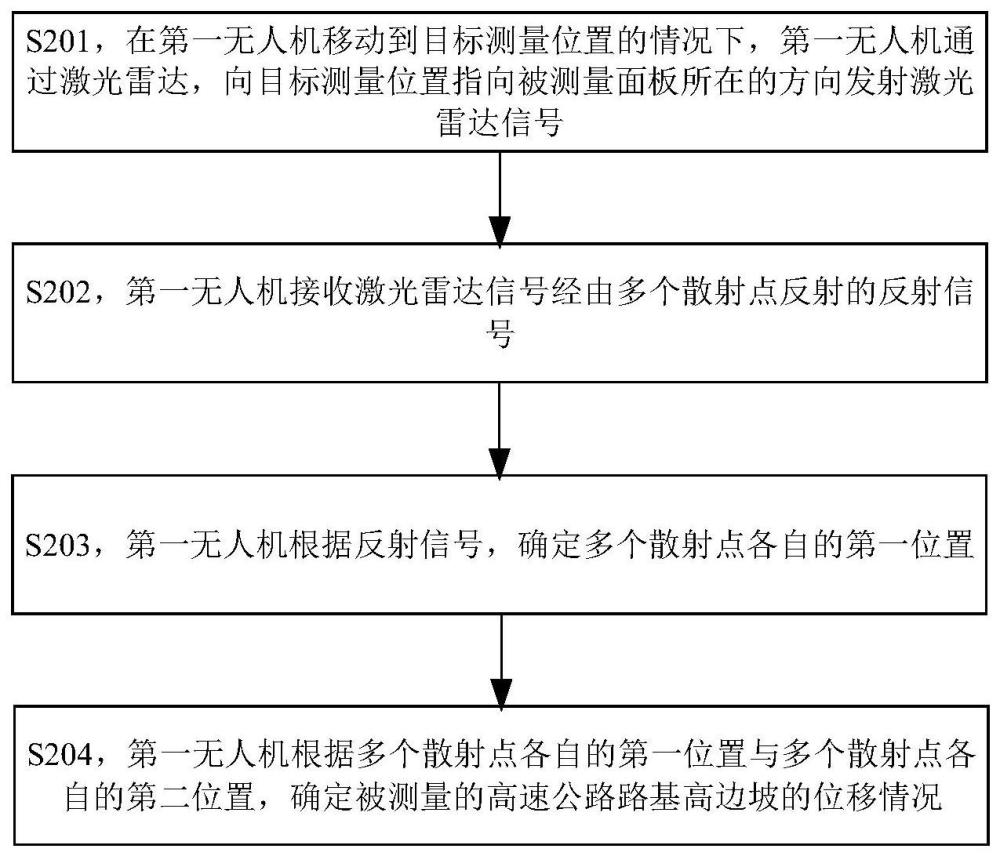
3、第一方面,提供一种基于无人机激光雷达的高速公路路基高边坡位移监测的方法,应用于设置有激光雷达的第一无人机,被测量的高速公路路基高边坡上设置有被测量面板,被测量面板上设置有多个散射点,该方法包括:在第一无人机移动到目标测量位置的情况下,第一无人机通过激光雷达,向目标测量位置指向被测量面板所在的方向发射激光雷达信号,其中,目标测量位置指向被测量面板所在的方向是预设好的方向,目标测量位置是第一无人机上一次测量多个散射点的位置时所处的位置;第一无人机接收激光雷达信号经由多个散射点反射的反射信号;第一无人机根据反射信号,确定多个散射点各自的第一位置;第一无人机根据多个散射点各自的第一位置与多个散射点各自的第二位置,确定被测量的高速公路路基高边坡的位移情况,其中,多个散射点各自的第二位置是第一无人机上一次测得的多个散射点各自的位置。
4、一种可能的设计方案中,第一无人机根据反射信号,确定多个散射点各自的第一位置,包括:第一无人机根据反射信号的方向,以及发射激光雷达信号到接收反射信号的时延,确定多个散射点各自的第一位置。第一无人机根据多个散射点各自的第一位置与多个散射点各自的第二位置,确定被测量的高速公路路基高边坡的位移情况,包括:第一无人机根据多个散射点各自的第一位置与多个散射点各自的第二位置,确定多个散射点中第一位置与第二位置存在位置差异的散射点数目是否大于第一预设阈值;若第一位置与第二位置存在位置差异的散射点数目小于或等于第一预设阈值,则第一无人机确定被测量的高速公路路基高边坡的位移情况为未发生位移;若第一位置与第二位置存在位置差异的散射点数目大于第一预设阈值,则第一无人机根据第一位置与第二位置存在位置差异的散射点的位置分布集中,确定被测量的高速公路路基高边坡的位移情况为发生位移。
5、可选地,第一无人机还设置有天线面板,若第一位置与第二位置存在位置差异的散射点的位置分布离散,则该方法还包括:第一无人机通过天线面板,向目标测量位置指向被测量面板所在的方向发射第一感知信号,其中,第一感知信号携带有第一无人机的当前位置以及多个散射点各自的第一位置,第一感知信号被多个散射点散射后的第一回波信号能被多个第二无人机接收到,多个第二无人机中的每个第二无人机用于根据第一回波信号确定多个散射点各自对应的第一信号传输时间,第一信号传输时间是指第一无人机发射第一感知信号到多个第二无人机接收第一回波信号之间的时间差;第一无人机接收多个第二无人机返回的第一信号传输时间;第一无人机根据第一信号传输时间,确定多个散射点各自的第三位置;第一无人机根据多个散射点各自的第二位置与多个散射点各自的第三位置,确定被测量的高速公路路基高边坡的位移情况。
6、进一步的,第一无人机根据多个散射点各自的第二位置与多个散射点各自的第三位置,确定被测量的高速公路路基高边坡的位移情况,包括:第一无人机根据多个散射点各自的第二位置与多个散射点各自的第三位置,确定多个散射点中第二位置与第三位置存在位置差异的散射点数目是否大于第二预设阈值;若第二位置与第三位置存在位置差异的散射点数目小于或等于第二预设阈值,则第一无人机确定被测量的高速公路路基高边坡的位移情况为未发生位移;若第二位置与第三位置存在位置差异的散射点数目大于第二预设阈值,则第一无人机根据第二位置与第三位置存在位置差异的散射点的位置分布集中,确定被测量的高速公路路基高边坡的位移情况为发生位移。
7、可选地,第一感知信号承载在符号上,符号的帧结构包括循环前缀和有用符号,循环前缀和有用符号的长度之和是根据协议定义的符号的子载波间隔确定,该方法还包括:在循环前缀和有用符号的长度之和不变的情况下,第一无人机根据多个第二无人机的位置,确定循环前缀与有用符号的长度比值。
8、进一步的,第一无人机根据多个第二无人机的位置,确定循环前缀与有用符号的长度比值,包括:若第一无人机根据多个第二无人机的位置,确定多个第二无人机与第一无人机位于同一侧,则第一无人机确定在协议定义子载波间隔的基础上,增大循环前缀与有用符号的长度比值,其中,多个第二无人机与第一无人机位于同一侧是指:多个第二无人机位于目标测量位置指向被测量面板所在的方向的反射方向上;若第一无人机根据多个第二无人机的位置,确定多个第二无人机中有至少一个第二无人机与第一无人机位于不同侧,则第一无人机确定在协议定义子载波间隔的基础上,增大循环前缀与有用符号的长度比值,其中,至少一个第二无人机与第一无人机位于不同侧是指:至少一个第二无人机位于目标测量位置指向被测量面板所在的方向的折射方向上,循环前缀与有用符号的长度比值的增大幅度与至少一个第二无人机的数目正相关。
9、进一步的,第一感知信号承载在多个载波上,循环前缀与有用符号的长度比值是通过多个载波的频域连续和/或非连续关系指示的。
10、可选地,若第二位置与第三位置存在位置差异的散射点的位置分布离散,则该方法还包括:第一无人机通过天线面板接收第二回波信号,其中,第二回波信号是多个第二无人机发射的第二感知信号被多个散射点散射得到的信号,第二感知信号承载有多个第二无人机各自的位置;第一无人机根据接收到的第二回波信号,确定多个散射点各自对应的第二信号传输时间,第二信号传输时间是指多个第二无人机发射第二感知信号到第一无人机接收第二回波信号之间的时间差,第二回波信号承载有第一信号传输时间;第一无人机根据第二信号传输时间,确定多个散射点各自的第四位置;第一无人机根据多个散射点各自的第二位置与多个散射点各自的第四位置,确定被测量的高速公路路基高边坡的位移情况。
11、进一步的,第一无人机根据多个散射点各自的第二位置与多个散射点各自的第四位置,确定被测量的高速公路路基高边坡的位移情况,包括:第一无人机根据多个散射点各自的第二位置与多个散射点各自的第四位置,确定多个散射点中第二位置与第四位置存在位置差异的散射点数目是否大于第三预设阈值;若第二位置与第四位置存在位置差异的散射点数目小于或等于第三预设阈值,则第一无人机确定被测量的高速公路路基高边坡的位移情况为未发生位移;若第二位置与第四位置存在位置差异的散射点数目大于第三预设阈值,则第一无人机根据第二位置与第四位置存在位置差异的散射点的位置分布集中,确定被测量的高速公路路基高边坡的位移情况为发生位移。
12、第二方面,提供了一种基于无人机激光雷达的高速公路路基高边坡位移监测的装置,装置应用于设置有激光雷达的第一无人机,被测量的高速公路路基高边坡上设置有被测量面板,被测量面板上设置有多个散射点,该装置被配置为:在第一无人机移动到目标测量位置的情况下,第一无人机通过激光雷达,向目标测量位置指向被测量面板所在的方向发射激光雷达信号,其中,目标测量位置指向被测量面板所在的方向是预设好的方向,目标测量位置是第一无人机上一次测量多个散射点的位置时所处的位置;第一无人机接收激光雷达信号经由多个散射点反射的反射信号;第一无人机根据反射信号,确定多个散射点各自的第一位置;第一无人机根据多个散射点各自的第一位置与多个散射点各自的第二位置,确定被测量的高速公路路基高边坡的位移情况,其中,多个散射点各自的第二位置是第一无人机上一次测得的多个散射点各自的位置。
13、一种可能的设计方案中,第一无人机根据反射信号,确定多个散射点各自的第一位置,包括:第一无人机根据反射信号的方向,以及发射激光雷达信号到接收反射信号的时延,确定多个散射点各自的第一位置。第一无人机根据多个散射点各自的第一位置与多个散射点各自的第二位置,确定被测量的高速公路路基高边坡的位移情况,包括:第一无人机根据多个散射点各自的第一位置与多个散射点各自的第二位置,确定多个散射点中第一位置与第二位置存在位置差异的散射点数目是否大于第一预设阈值;若第一位置与第二位置存在位置差异的散射点数目小于或等于第一预设阈值,则第一无人机确定被测量的高速公路路基高边坡的位移情况为未发生位移;若第一位置与第二位置存在位置差异的散射点数目大于第一预设阈值,则第一无人机根据第一位置与第二位置存在位置差异的散射点的位置分布集中,确定被测量的高速公路路基高边坡的位移情况为发生位移。
14、可选地,第一无人机还设置有天线面板,若第一位置与第二位置存在位置差异的散射点的位置分布离散,则该装置被配置为:第一无人机通过天线面板,向目标测量位置指向被测量面板所在的方向发射第一感知信号,其中,第一感知信号携带有第一无人机的当前位置以及多个散射点各自的第一位置,第一感知信号被多个散射点散射后的第一回波信号能被多个第二无人机接收到,多个第二无人机中的每个第二无人机用于根据第一回波信号确定多个散射点各自对应的第一信号传输时间,第一信号传输时间是指第一无人机发射第一感知信号到多个第二无人机接收第一回波信号之间的时间差;第一无人机接收多个第二无人机返回的第一信号传输时间;第一无人机根据第一信号传输时间,确定多个散射点各自的第三位置;第一无人机根据多个散射点各自的第二位置与多个散射点各自的第三位置,确定被测量的高速公路路基高边坡的位移情况。
15、进一步的,第一无人机根据多个散射点各自的第二位置与多个散射点各自的第三位置,确定被测量的高速公路路基高边坡的位移情况,包括:第一无人机根据多个散射点各自的第二位置与多个散射点各自的第三位置,确定多个散射点中第二位置与第三位置存在位置差异的散射点数目是否大于第二预设阈值;若第二位置与第三位置存在位置差异的散射点数目小于或等于第二预设阈值,则第一无人机确定被测量的高速公路路基高边坡的位移情况为未发生位移;若第二位置与第三位置存在位置差异的散射点数目大于第二预设阈值,则第一无人机根据第二位置与第三位置存在位置差异的散射点的位置分布集中,确定被测量的高速公路路基高边坡的位移情况为发生位移。
16、可选地,第一感知信号承载在符号上,符号的帧结构包括循环前缀和有用符号,循环前缀和有用符号的长度之和是根据协议定义的符号的子载波间隔确定,该方法还包括:在循环前缀和有用符号的长度之和不变的情况下,第一无人机根据多个第二无人机的位置,确定循环前缀与有用符号的长度比值。
17、进一步的,第一无人机根据多个第二无人机的位置,确定循环前缀与有用符号的长度比值,包括:若第一无人机根据多个第二无人机的位置,确定多个第二无人机与第一无人机位于同一侧,则第一无人机确定在协议定义子载波间隔的基础上,增大循环前缀与有用符号的长度比值,其中,多个第二无人机与第一无人机位于同一侧是指:多个第二无人机位于目标测量位置指向被测量面板所在的方向的反射方向上;若第一无人机根据多个第二无人机的位置,确定多个第二无人机中有至少一个第二无人机与第一无人机位于不同侧,则第一无人机确定在协议定义子载波间隔的基础上,增大循环前缀与有用符号的长度比值,其中,至少一个第二无人机与第一无人机位于不同侧是指:至少一个第二无人机位于目标测量位置指向被测量面板所在的方向的折射方向上,循环前缀与有用符号的长度比值的增大幅度与至少一个第二无人机的数目正相关。
18、进一步的,第一感知信号承载在多个载波上,循环前缀与有用符号的长度比值是通过多个载波的频域连续和/或非连续关系指示的。
19、可选地,若第二位置与第三位置存在位置差异的散射点的位置分布离散,则该装置被配置为:第一无人机通过天线面板接收第二回波信号,其中,第二回波信号是多个第二无人机发射的第二感知信号被多个散射点散射得到的信号,第二感知信号承载有多个第二无人机各自的位置;第一无人机根据接收到的第二回波信号,确定多个散射点各自对应的第二信号传输时间,第二信号传输时间是指多个第二无人机发射第二感知信号到第一无人机接收第二回波信号之间的时间差,第二回波信号承载有第一信号传输时间;第一无人机根据第二信号传输时间,确定多个散射点各自的第四位置;第一无人机根据多个散射点各自的第二位置与多个散射点各自的第四位置,确定被测量的高速公路路基高边坡的位移情况。
20、进一步的,第一无人机根据多个散射点各自的第二位置与多个散射点各自的第四位置,确定被测量的高速公路路基高边坡的位移情况,包括:第一无人机根据多个散射点各自的第二位置与多个散射点各自的第四位置,确定多个散射点中第二位置与第四位置存在位置差异的散射点数目是否大于第三预设阈值;若第二位置与第四位置存在位置差异的散射点数目小于或等于第三预设阈值,则第一无人机确定被测量的高速公路路基高边坡的位移情况为未发生位移;若第二位置与第四位置存在位置差异的散射点数目大于第三预设阈值,则第一无人机根据第二位置与第四位置存在位置差异的散射点的位置分布集中,确定被测量的高速公路路基高边坡的位移情况为发生位移。
21、第三方面,提供了一种电子设备,包括:处理器和存储器;该存储器用于存储计算机程序,当该处理器执行该计算机程序时,以使该电子设备执行第一方面所述的方法。
22、在一种可能的设计方案中,第三方面所述的电子设备还可以包括收发器。该收发器可以为收发电路或接口电路。该收发器可以用于第三方面所述的电子设备与其他电子设备通信。
23、在本发明实施例中,第三方面所述的电子设备可以为终端,或者可设置于该终端中的芯片(系统)或其他部件或组件,或者包含该终端的系统。
24、第四方面,提供一种计算机可读存储介质,包括:计算机程序或指令;当该计算机程序或指令在计算机上运行时,使得该计算机执行第一方面所述的方法。
25、综上,上述方法及系统具有如下技术效果:
26、在第一无人机移动到目标测量位置,也即上一次测量的位置的情况下,第一无人机可以通过激光雷达,测得被测量的高速公路路基高边坡的被测量面板上的多个散射点各自的第一位置,如此,第一无人机根据多个散射点各自的第一位置与多个散射点各自的第二位置,便可以确定被测量的高速公路路基高边坡的位移情况,其中,多个散射点各自的第二位置是第一无人机上一次测得的多个散射点各自的位置,即通过无人机实现高速公路路基高边坡位移监测,能够降低成本,且监测效率和便捷性都很高。
- 还没有人留言评论。精彩留言会获得点赞!