一种车辆定位方法、装置、车辆和存储介质与流程
本技术涉及车辆领域,并且更具体地,涉及车辆定位领域中一种车辆定位方法、装置、车辆和存储介质。
背景技术:
1、目前车辆端的定位系统主要通过全球定位系统实现精准的定位,现阶段主流的定位系统均依赖卫星进行定位导航,需要在地球任意一点能同时观测4颗卫星来保证对该点的海拔、经纬度等信息的采集。
2、而在城市环境内,由于城市内的高层建筑越来越密集,地下隧道越来越多,导致相应位置处能搜索到的定位卫星数量较少、卫星信号较弱,因此不能满足定位的要求。此外,由于目前车载摄像头、雷达的布置,相关元件产生的二次谐波也会对卫星导航的频段造成频段干扰,从而影响到卫星信号,导致车辆端无法通过全球定位系统实现定位。
3、相关技术通过移动网络测算车辆端与基站或者信标之间的相对位置关系,从而实现对车辆端的定位,但是这样定位的精度较低,只能用于粗略的估算,不能给出准确的位置信息,精度的提高依赖于信标的建设,成本较高。
技术实现思路
1、本技术提供了一种车辆定位方法、装置、车辆和存储介质,该方法能够在全球定位系统信号较差的情况下提供准确的定位。
2、第一方面,提供了一种车辆定位方法,应用于车联网平台侧,该方法包括:
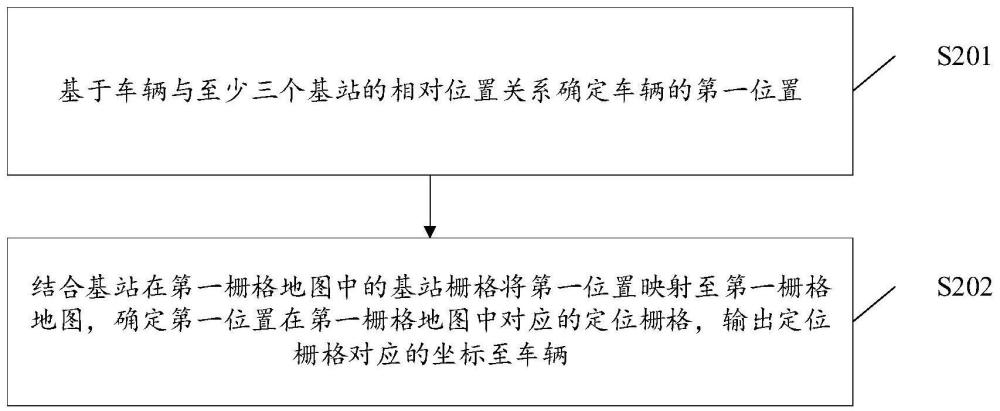
3、基于所述车辆与至少三个基站的相对位置关系确定所述车辆的第一位置;
4、结合所述基站在第一栅格地图中的基站栅格将所述第一位置映射至所述第一栅格地图,确定所述第一位置在所述第一栅格地图中对应的定位栅格,输出所述定位栅格对应的坐标至所述车辆;
5、其中,所述第一栅格地图中每个栅格的坐标根据全球定位系统预先确定。
6、通过上述技术方案,能够确定车辆与基站之间的相对位置关系,再根据基站对应的基站栅格将车辆与基站之间的相对位置关系映射在第一栅格地图上,然后以定位栅格的坐标确定车辆的坐标,进而克服了相关技术仅通过基站定位车辆位置的定位精度较低的问题,并且通过全球定位系统预先确定第一栅格地图中每个栅格的坐标,从而将准确的定位信息以栅格的形式保存在第一栅格地图中,即使在全球定位系统卫星信号较弱的时候也能为车辆提供精准的定位服务,充分利用了现有的电信基础设施,不需要增加额外的硬件设施,不会带来额外的成本。
7、结合第一方面,在某些可能的实现方式中,所述结合所述基站在第一栅格地图中的基站栅格将所述第一位置映射至所述第一栅格地图之前,还包括:
8、获取目标区域的第二栅格地图,通过全球定位系统获取所述目标区域的栅格化坐标集;
9、将所述栅格化坐标集中的坐标与所述第二栅格地图中的每个栅格相匹配,生成所述第一栅格地图。
10、通过上述技术方案,在全球定位系统卫星信号较好时,从全球定位系统获取栅格化的坐标集,将栅格化的坐标集与现有的第二栅格地图相匹配,从而将坐标保存在第一栅格地图中,既能在全球定位系统卫星信号较弱时通过预先设定坐标的第一栅格地图确定车辆的准确坐标,还能确定车辆在地图中的位置,从而在全球定位系统卫星信号较弱时持续导航。
11、结合第一方面和上述实现方式,在某些可能的实现方式中,所述将所述栅格化坐标集中的坐标与所述第二栅格地图中的每个栅格相匹配,生成所述第一栅格地图,包括:
12、将所述第二栅格地图与所述栅格化坐标集匹配,对所述第二栅格地图中的每个栅格赋予对应的坐标,将每个所述栅格和对应的坐标映射至所述目标区域的矢量地图,生成矢量栅格地图为所述第一栅格地图。
13、通过上述技术方案,将栅格和栅格对应的坐标映射至矢量地图上,矢量地图可以在任意尺寸下进行无损缩放,使得基于矢量栅格地图的第一栅格地图能提高定位的精度,从而能在进行缩放的情况下不损失栅格信息,更有利于提高用户的使用体验。
14、结合第一方面和上述实现方式,在某些可能的实现方式中,所述生成所述第一栅格地图后,还包括:
15、获取所述目标区域中每个基站的坐标信息,将所述每个基站的坐标信息与所述第一栅格地图上的各个栅格进行匹配,将所述每个基站的坐标信息匹配的栅格作为基站栅格。
16、通过上述技术方案,在生成栅格地图时,提前获取每个基站的坐标信息,从而预先确定每个基站对应的基站栅格,进而在根据第一栅格地图对车辆进行定位时,可以直接根据基站的信息确定基站对应的基站栅格,由此可以在定位时省去根据基站坐标在第一栅格地图中查找基站栅格的步骤,并且直接预先确定的基站栅格精度更高,从而有利于提高定位精度。
17、结合第一方面和上述实现方式,在某些可能的实现方式中,所述基于所述车辆与至少三个基站的相对位置关系确定所述车辆的第一位置,包括:
18、获取车辆与至少三个基站的时间提前量,以及所述至少三个基站的扇区号;
19、根据所述时间提前量分别计算所述车辆与所述至少三个基站的距离;
20、根据所述车辆与所述至少三个基站的距离以及所述扇区号确定所述待定位车辆相对于所述至少三个基站的第一位置。
21、通过上述技术方案,通过时间提前量计算车辆与基站的距离,根据扇区号确定车辆相对于基站的方位,从而确定车辆与至少三个基站的相对位置关系。
22、结合第一方面和上述实现方式,在某些可能的实现方式中,所述结合所述基站在第一栅格地图中的基站栅格将所述第一位置映射至第一栅格地图,确定所述第一位置在所述第一栅格地图中对应的定位栅格,包括:
23、获取所述基站的坐标信息,将所述基站的坐标信息与所述第一栅格地图中各个栅格对应的坐标信息匹配,将所述基站映射至对应的所述基站栅格;
24、根据基站栅格与对应基站的映射关系将所述第一位置映射至所述第一栅格地图上,将所述第一位置与所述第一栅格地图中的每个栅格进行匹配,确定所述第一位置对应的定位栅格。
25、通过上述技术方案,实时获取基站的坐标信息,从而确定基站对应的基站栅格,进而可以根据基站与车辆的相对位置关系确定车辆在第一栅格地图中的定位栅格,由此实现对车辆的定位。
26、结合第一方面和上述实现方式,在某些可能的实现方式中,所述确定车辆相对于至少三个基站的第一位置之前,还包括:
27、判定所述车辆的实时位置的全球定位系统的信号强度低于信号强度阈值。
28、通过上述技术方案,实时获取车辆所在位置的全球定位系统的信号强度,在信号强度较好时通过全球定位系统实现定位,只在信号强度低于信号强度阈值的情况下使用移动网络进行定位,进而有利于节约移动网络资源,尽可能的利用全球定位系统实现定位,即使在全球定位系统信号强度较差时也能将定位方式转变为移动网络定位,由此为智能驾驶、车辆导航以及车辆救援提供可靠的定位方式。
29、第二方面,提供了一种车辆定位装置,该装置包括:
30、第一定位模块,用于基于所述车辆与至少三个基站的相对位置关系确定所述车辆的第一位置;
31、第二定位模块,结合所述基站在第一栅格地图中的基站栅格将所述第一位置映射至所述第一栅格地图,确定所述第一位置在所述第一栅格地图中对应的定位栅格,输出所述定位栅格对应的坐标至所述车辆;
32、其中,所述第一栅格地图中每个栅格的坐标根据全球定位系统预先确定。
33、第三方面,提供一种车辆,包括:
34、存储器,用于存储可执行程序代码;
35、处理器,用于从所述存储器中调用并运行所述可执行程序代码,使得所述车辆执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
36、第四方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
37、第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
- 还没有人留言评论。精彩留言会获得点赞!